
Принцип работы датчика ускорения
Принцип работы датчика ускорения в общих словах такой: при воздействии на подвижный элемент датчика массой возникает смещение, пропорциональное ускорению. Независимо от конструкции датчика ускорений его основная цель заключается в детектировании перемещения этой массы относительно корпуса устройства и преобразовании его в пропорциональный электрический сигнал. Поэтому другой составной частью всех акселерометров является детектор перемещений, способный измерять микроскопические амплитуды вибрационных колебаний или линейных ускорений.
На рис. 3.2 показана конструкция емкостного акселерометра, изготовленного с использованием МСТ (микросистемная техника). В кристалле кремния 1 вытравлены участки 2 так, что значительная инертная масса 3 механически отделена от других частей акселерометра. Она соединена с ними лишь тонкими перемычками 4, которые играют роль упругих элементов. На небольшом расстоянии (~10 мкм) от кристалла кремния сверху и снизу расположены металлические электроды 5 и 6. Роль демпфера играет вязкая непроводящая жидкость, которой заполняется пространство между электродами и кремнием.
Рис. 3.2 Конструкция емкостного акселерометра
Инертная масса 3 в такой конструкции может перемещаться только по вертикали. Электрические ёмкости между ней и верхним (нижним) электродами включены в противоположные плечи электрической мостовой схемы переменного тока. Её балансируют так, чтобы при отсутствии ускорения сигнал на выходе равнялся нулю. Когда объект, на котором установлен акселерометр, движется с ускорением, направленным вдоль оси сенсора, инертная масса 3 смещается из положения равновесия, вследствие чего одна из емкостей возрастает, а другая уменьшается. Из-за нарушения баланса на выходе мостовой схемы появляется напряжение соответствующего знака и тем большее, чем больше ускорение. Мостовую электрическую схему, необходимые электронные ключи, усилители, элементы термокомпенсации – все, что требуется для обработки сигналов и калибровки акселерометра, – формируют ныне методами МСТ на том же кристалле кремния.
В описанной конструкции акселерометра ускорение, которое и является здесь первичным информационным сигналом, сначала превращается в линейное перемещение инертной массы. Перемещение, в свою очередь, преобразуется в изменение емкости верхнего и нижнего конденсаторов, а последнее – в электрический сигнал.
· Пьезоэлектрические акселерометры – самый распространенный вид акселерометров, которые широко используются для решения задач тестирования и измерений. Такие акселерометры имеют очень широкий частотный диапазон (от нескольких Гц до 30 кГц) и диапазон чувствительности, а также выпускаются в различных размерах и формах. Выходной сигнал пьезоэлектрических акселерометров может быть зарядовым (Кл) или по напряжению. Датчики могут использоваться для измерений как удара, так и вибрации.
· Пьезорезистивные акселерометры обычно имеют малый диапазон чувствительности, поэтому они больше подходят для детектирования ударов, чем определения вибрации. Еще одна область их применения – испытания на безопасность при столкновении. В большинстве своем пьезорезистивные акселерометры отличаются широким диапазоном частот (от нескольких сотен Гц до 130 кГц и более), при этом частотная характеристика может доходить до 0 Гц (т.н. DC датчики) или оставаться неизменной, что позволяет измерять сигналы большой продолжительности.
· Акселерометры на переменных конденсаторах относятся к компонентам новейших технологий. Как и пьезорезистивные акселерометры, они имеют выход по постоянному току. Такие акселерометры отличаются высокой чувствительностью, узкой полосой пропускания (15–3000 Гц) и отличной температурной стабильностью. Погрешность чувствительности в полном температурном диапазоне до 180°C не превышает 1.5 %. Акселерометры на переменных конденсаторах используются для измерений низкочастотной вибрации, движения и фиксированного ускорения.
Измеряемые параметры
Параметры, измеряемые акселерометрами, можно сгруппировать в следующие классы:
1. Измерение вибрации: объект вибрирует, если он производит колебательные движения относительно положения равновесия. Вибрацию измеряют в транспортной и аэрокосмической промышленности, а также на промышленном производстве.
2. Измерение ударных ускорений: внезапное возбуждение структуры, создающее резонанс. Ударный импульс может создаваться взрывом, ударом молотка по предмету или в результате столкновения с другим объектом.
3. Измерение движения: медленное перемещение со скоростью от доли секунды до нескольких минут, например, перемещение руки робота или подвеска автомобиля.
4. Сейсмоисследования: измерения малых перемещений и низкочастотной вибрации. Такие измерения требуют специализированных малощумящих акселерометров с высокой разрешающей способностью. Акселерометры для сейсмоисследований контролируют движения мостов, полов, а также определяют землетрясения.
Для измерения вибрации используются емкостные и пьезоэлектрические акселерометры. Пьезоэлектрические акселерометры благодаря их широкой частотной характеристике, хорошей чувствительности и высокой разрешающей способности. В зависимости от типа выходного сигнала они могут быть с зарядовым выходом и с выходом по напряжению (IEPE).
В последнее время широко используются акселерометры с вольтовым выходным сигналом, поскольку они удобны в применении. Несмотря на разнообразие торговых марок и модификаций, все производители компонентов этой группы придерживаются единого псевдо-стандарта, поэтому легко заменяемы между собой. Обычно такие акселерометры имеют в своей структуре усилитель заряда, поэтому не требуют дополнительных внешних компонентов. Всё, что нужно для подключения акселерометра – это источник постоянного тока. Таким образом, для измерения вибраций в известном диапазоне и в пределах температурной нормы -55…125°C (до 175°C для высокотемпературных моделей) рекомендуется использовать пьезоэлектрические акселерометры с выходным сигналом по напряжению.
Преимущества акселерометров с зарядовым выходом проявляются в возможности работы при высоких температурах и в широком диапазоне амплитуды, который определяется настройками усилителя заряда (заметим, что акселерометры по напряжению имеют фиксированный диапазон амплитуды). Типичный рабочий диапазон температур составляет -55…288°C, а специализированные компоненты могут работать в диапазоне -269…760°C.
Однако в отличие от IEPE акселерометров, емкостные датчики требуют применения специальных малошумящих кабелей, цена которых значительно превышает цену на стандартные коаксиальные кабели. Для подключения датчиков также потребуются усилители заряда и линейные конвертеры. Подводя итоги, можно придти к заключению, что емкостные акселерометры предпочтительны для высокотемпературных измерений неизвестных заранее ускорений.
Для измерения вибрации очень малой частоты, рекомендуется использовать акселерометры на переменных конденсаторах (VC). Их частотная характеристика составляет от 0 Гц до 1 кГц, в зависимости от требуемой чувствительности. При проведении измерений низкочастотной вибрации VC акселерометр с частотной характеристикой 0–15 Гц будет иметь чувствительность 1В/g. Такие датчики незаменимы в электрогидравлических шейкерах, в автомобилестроении, в тестовых испытаниях машин и конструкций, в системах подвески, железнодорожном транспорте.
Для измерений ударных ускорений используются две технологии, модельный ряд представлен компонентами на различный уровень силы удара и с различными выходными характеристиками. Выбор акселерометра для ударных ускорений, в первую очередь, зависит от ожидаемого уровня ударного ускорения.
Низкий уровень <500g
Столкновение <2000g
Поле в дальней зоне 500–1000g, датчик на расстоянии 2 метров от точки удара. Поле в ближней зоне >5000g, датчик на расстоянии менее 1 метра от точки удара.
Для измерения малых ударных ускорений можно использовать акселерометры общего применения. Акселерометр должен иметь линейный диапазон до 500g и ударопрочность 500g. Обычно для этого используются датчики с выходным сигналом по напряжению, поскольку они не чувствительны к кабельным вибрациям. Для аттенюации резонанса рекомендуется использовать усилитель с фильтром нижних частот.
Для тестовых испытаний машин на безопасность используются пьезорезистивные акселерометры.
Для измерения движения, фиксированного ускорения и низкочастотной вибрации подходящим выбором станут акселерометры с переменной емкостью. Они позволяют измерять медленные изменения ускорения и низкочастотную вибрацию, при этом уровень их выходного сигнала достаточно высок. Также, такие датчики обеспечивают высокую стабильность в широком диапазоне рабочих температур.
При установке VC акселерометра в положение, когда его ось чувствительности параллельна оси земного притяжения, выходной сигнал датчика будет равен усилию в 1g. Такая закономерность известна как DC отклик. Благодаря такой особенности, акселерометры на переменных конденсаторах часто используются для измерений центробежной силы или ускорений и замедлений подъемных устройств.
Таким образом, по рабочему диапазону частот в системе можно использовать только пьезоэлектрический датчик, например такой, который используется в качестве датчика детонации в системе управления двигателем внутреннего сгорания.
Принцип действия датчика
Конструктивно датчик детонации представляет собой акселерометр, то есть прибор, преобразующий энергию механических колебаний станка в электрический сигнал. Другими словами, это приемник звуковых колебаний в твердых телах.
При возникновении вибрации инерционная масса воздействует на пьезоэлемент с соответствующими частотой и усилием, в результате возникновения пьезоэффекта на контактах появляется электрический сигнал.
Большое значение имеет место установки датчика детонации на станке. При его выборе руководствуются следующими критериями:
— сигналы от каждого узла станка не должны сильно различаться по уровню;
— уровень сигнала должен иметь достаточную для его дальнейшей обработки величину;
— помехи, возникающие от других шумов работающего станка, должны быть минимальными.
Важными характеристиками датчика детонации являются:
— температурный диапазон. Датчик должен быть работоспособным до 150 – 200 о С;
— собственная резонансная частота. По принципу определения наличия детонации различают системы с резонансными и широкополосными датчиками детонации. В системах с резонансным датчиком значение собственной резонансной частоты совпадает с частотой детонационных колебаний в цилиндре, а в системах с широкополосным датчиком собственная резонансная частота датчика значительно выше, но на частотной характеристике существует равномерный участок, лежащий в диапазоне частот детонационных колебаний;
— коэффициент преобразования. Он показывает, как соотносится амплитуда выходного сигнала с амплитудой детонационных колебаний в месте установки датчика (mv/g).
Внешний вид датчика приведен на рис. 3.4.

Рис.3.4 Широкополосный датчик ускорений
Работа пьезоэлектрического датчика основана на том, что некоторые типы материалов генерируют электростатическую энергию или напряжение, когда к ним прикладывается механическая нагрузка. Наиболее часто применяемым пьезоматериалом являются кварц, поскольку он имеет низкую чувствительность к изменению температуры и хорошую линейность по широкому диапазону уровней напряжений с низким гистерезисом. Пьезоэлектрические преобразователи обеспечивают равномерный выход на частотах до 50 кГц. Кварцевые преобразователи имеют температурный диапазон от – 200 о С до + 300 о С.
На рис. 3.5 показана конструкция датчика детонации.
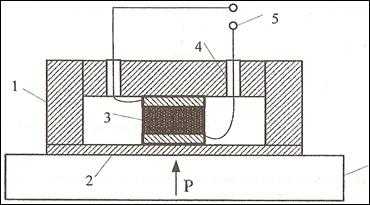
Рис. 3.5 Конструкция пьезоэлектрического датчика детонации: 1 — корпус, 2 — инерционный элемент, 3 — пьезоэлемент, 4 — отверстие соединения с атмосферой, 5 — выходные контакты
Из литературы /глава 2/ известно, что появление дефектов в работе механизмов станка приводит к возникновению колебаний в следующем диапазоне частот: 500-5000 Гц (для изношенных зубьев шестерен).
Таким образом, для использования штатного датчика детонации в целях вибродиагностики станка необходимо убедиться, что он обладает равномерной АЧХ в диапазоне частот от 500Гц до 5кГц. Таким датчиком является датчик детонации типа 18.3855-01.
stydopedia.ru
Приборы для измерения угловых скоростей и ускорений самолета
5.1. Указатель поворота эуп-53
Электрический указатель поворота типа ЭУП-53 предназначен для определения направления разворота самолета. В указателе поворота используется свойство гироскопа с двумя степенями свободы совмещать ось собственного вращения с осью вынужденного вращения.
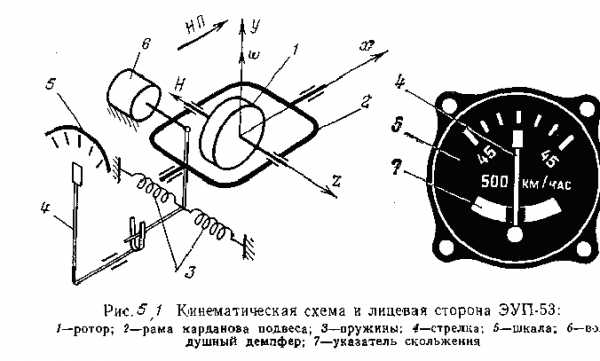
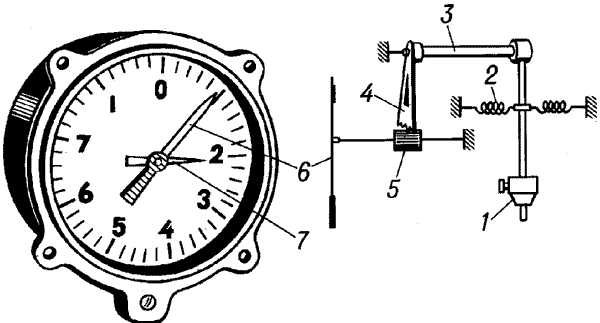
Кинематическая схема ЭУП-53 и внешний вид прибора представлены на рис. 5.1. Ось ротора гироскопа 1 (ось собственного вращения) параллельна поперечной оси самолета, ось рамы 2 параллельна продольной оси самолета. Прецессия гироскопа ограничивается двумя пружинами -3, а колебания гироскопа уменьшаются демпфером 6. По стрелке 4 и шкале 5 определяют направление разворота. В прибор ЭУП-53 встроен указатель скольжения.
Если самолет совершает разворот вокруг своей вертикальной оси, то гироскоп, реагируя на скорость разворота, прецессирует, пока момент пружины не уравновесит гироскопический момент. По отклонению стрелки прибора можно судить о направлении разворота, а в комплексе с указателем скольжения удобно контролировать выполнение координированного разворота. Кроме того, ЭУП-53 вместе с указателем скольжения и вариометром в аварийных случаях могут в какой-то мере заменить авиагоризонт, поскольку показания этих приборов ориентировочно помогают определить положение самолета относительно плоскости горизонта. При крене самолета ЭУП-53 имеет погрешность.
Пусть самолет совершает разворот с угловой скоростью ω=const и имеет при этом крен, равный γ (рис. 4.7). Собственная ось гироскопа указателя поворота отклонится при этом на угол р. Теперь гироскоп реагирует не на скорость ω, а на ее проекцию ω1 на ось, перпендикулярную собственной оси гироскопа:
(5.1)

При этом в соответствии с уравнением для установившегося значения угла β можно записать
(5.2)
Выполнив преобразования, получаем
(5.3)
Для малых углов β уравнение (5.3) будет
откуда(5.3)
Из выражения (5.3) видно, что угол отклонения гироскопа зависит не только от величины угловой скорости разворота, но и от крена самолета, что, естественно, вносит ошибку в показания прибора.
С другой стороны, если H= const, c=const и ω = const, то β=ƒ(γ)
В то же время при координированном развороте угловая скорость разворота, крен и линейная скорость V связаны следующим образом:
(5.4)
где g — ускорение силы тяжести.
Подставив (5.4) в (5.3), имеем выражение для угла поворота оси прецессии
(5.5)
из которого видно, что при координированном развороте при V= const прибор показывает крен самолета. Поэтому на шкале прибора нанесены оцифрованные деления, соответствующие только одной угловой скорости разворота, а именно, когда самолет совершает координированный разворот с линейной скоростью 500 км/ч.
Показания прибора зависят также и от стабильности оборотов ротора гироскопа. Из уравнений видно, что при колебании скорости вращения гироскопа будут изменяться и показания прибора. Поэтому в ЭУП-53 в качестве гиромотора используется электродвигатель постоянного тока и специальный центробежный регулятор скорости.
Указатель поворота имеет некоторую зону нечувствительности к измеряемой скорости, поскольку прецессия гироскопа начинается тогда, когда гироскопический момент больше момента трения по оси рамы. Следовательно, минимальная угловая скорость, на которую может реагировать прибор, определяется выражением
(5.6)
В прямолинейном полете гироузел удерживается в нейтральном положении с помощью пружин, и стрелка указателя находится на нуле. При развороте самолета по курсу корпус указателя поворота поворачивается вокруг мнимой оси ZZгироскопа. Возникает гироскопический момент, под действием которого гироскоп прецессирует вокруг оси YY до тех пор, пока гироскопический момент будет уравновешен моментом противодействующих пружин. Поворот гироскопа вокруг оси УУ через передаточный механизм передается на стрелку, отклонение которой определяется формулой
где а — угол отклонения стрелки;
,—угловая скорость разворота самолета;
γ— поперечный крен самолета;
К — коэффициент пропорциональности.
Таким образом, угол отклонения стрелки зависит от угловой скорости самолета и угла поперечного крена, который, в свою очередь, зависит от линейной скорости полета. Шкалу прибора можно градуировать или в единицах угловой скорости, или в градусах поперечного крена. Для получения возможности использовать указатель поворота как резервный авиагоризонт, шкала ЭУП-53МК-500 отградуирована для индикации поперечного крена, и прибор с достаточной точностью указывает величину крена самолета при линейной скорости полета 500 км/ч. При увеличении линейной скорости прибор занижает показания. Так, при Ун,.,. =900 км/ч крен но указателю в два раза меньше фактического. оси УУ, а следовательно, и стрелки прибора имеют воздушный демпфер(Рис.5.3)
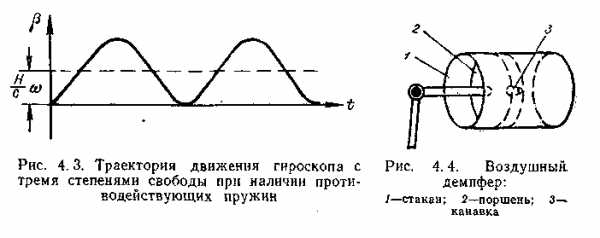
Рис.5.3.воздушный демпфер
1-стакан, 2-поршень, 3-канавка.
В одном корпусе с указателем поворота установлен указатель скольжения, состоящий пз изогнутой стеклянной трубки, заполненной жидкостью (толуолом), в которую помещен черный стеклянный шарик. Принцип действия указателя скольжения основан на свойстве физического маятника.
В полете пилоты непрерывно сравнивают показания по крену основных авиагоризонтов с показаниями ЭУП-53МК-500. При обесточивании сети постоянного тока питание указателя поворота обеспечивается от аккумуляторов. Положения стрелки указателя поворота и шарика указателя скольжения при различных эволюциях самолета показаны на рис.5.4.
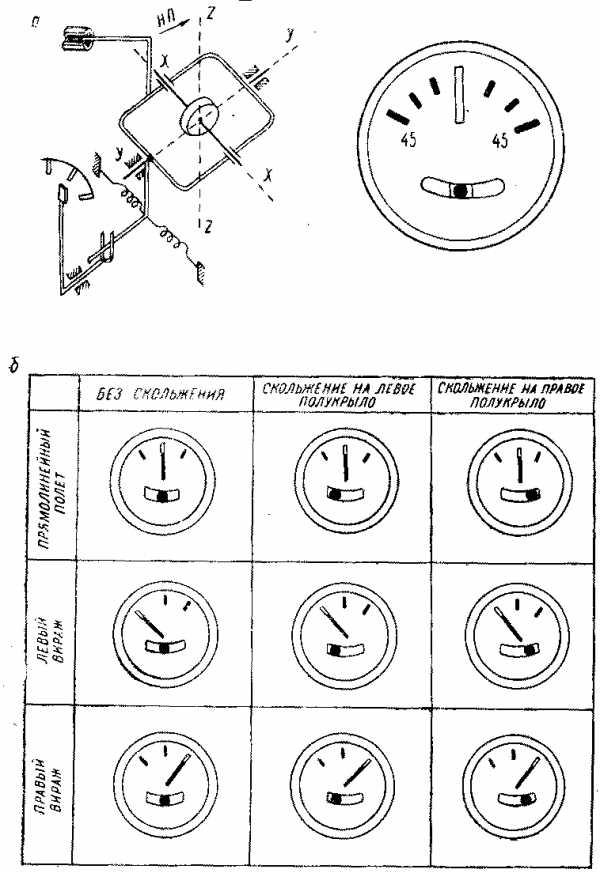
Рис.5.4 Положения стрелки указателя поворота и шарика указателя скольжения при различных эволюциях самолета.
Ротор гироскопа 1 (Рис5.5) приводится во вращение двигателем постоянного тока. Обмотка 2 якоря 8 двигателя состоит из девяти катушек, каждая из которых, в свою очередь, состоит из двух секций. Якорь двигателя механически связан с ротором. 1ок в катушки якоря подается через графитовые щетки 4 и, коллектор 5. Магнитный поток создается двумя постоянными магнитами 6 и подводится к катушкам якоря с помощью магнитопроводов 7. Для того чтобы скорость вращения ротора была постоянной двигатель снабжают центробежным регулятором, состоящим из контактов 8 и 9. Если скорость вращения двигателя превышает 6000 об/мин, в следствии влияния центробежной силы подвижный контакт 9 отходит от контакта 8. При размыкании контактов вводится последовательно с цепью обмотки якоря добавочное сопротивление10, рамное 450 Ом, что приводит к снижению тока якоря и снижению скорости вращения ротора. В каждой из двух параллельных ветвей обмотки якоря имеется по одному сопротивлению, шунтируемому своими контактами. Подшипники 11 ротора защищаются т графитной пыли пылизащитными шайбами 12, смазка подшипников сохраняется маслодержательными шайбами 13. Осевой люфт ротора регулируется с помощьюрезьбовой пробки 14, в которой установлен один из шарикоподшипников ротора. Кожух гиромотора 15, представляющий собой рамку гироскопа, вращается на подшипниках 16. Статическая балансировка гироузла осуществляется с помощью грузиков 17. Кожух связан с поршнем демпфера 18 через поводок 19, тягу 20 и шатун 21. На дне цилиндра демпфера 22 имеется отверстие, площадь которого регулируется винтом 23. Регулировочный винт контрится пружиной 24. Противодействующий момент создается упругими пружинами 25. Регулировка натяжения пружины и установка гироузла в среднее положение осуществляется перемещением резьбовых втулок 26, с которыми через держатель 27 связаны пружины. Поворот гироузла передается к стрелке прибора 28 через передаточный механизм, состоящий из пальца 29, поводка 80, втулки поводка 81, оси стрелки 82. Корпус 88 фланцевого типа закрыт тонким алюминиевым кожухом 84, на дне которого имеется отверстие Для вывода штепсельной вилки. Для уменьшения возможного влияния двигателя постоянного тока на компасы под алюминиевый кожух помещается пермаллоевый магнитный экран 35. С передней бороны корпус указателя поворота закрыт стеклом 86. Для того, чтобы в корпус прибора не попадала пыль, между стеклом и корпусом помещается резиновая прокладка 87, а между кожухом и корпусом резиновая прокладка 88. На циферблате сделано несколько светящихся делений. Крайние деления соответствуют угловой скорости вращения 11,2 град/сек, которая достигается при скорости 500км/ч на крене 45о. Всередине циферблата снизу сделан вырез для показа шарикового указателя скольжения 39.
Электрическая схема указателя поворота педставлена на рисунке 5.6. Для уменьшения радиопомех питание к обмоткам якоря Rя подаётся через фильтр, Состоящий из двух конденсаторов С и двух индукционных катушек L. В цепи обмоток якоря представлены добавочные сопротивления Rдоб, параллельно которым расположены центробежные контакты К регулятора скорости вращения ротора.
Эксплуатация. Перед полетом включить выключатель питания «ЭУП» на верхнем электрощитке пилотов. Через 2—3 мин (время готовности) проверить работоспособность указателя поворота, для чего нажать на край приборной доски, создав ей не которое движение вокруг вертикальной оси. Если стрелка указателя отклонится, то прибор исправен.

Рис.5.6 Электрическая схема указателя поворота.
Основные технические характеристики.
Напряжение питания 27В
Потребляемая мощность 3,5Вт
Вес 1,1Кг
Диапоты по высоте до 20 км
Температурный диапазон -60…+50
Чувствительность 8±1,3гр/сек
Погрешность из за крена ±0,2гр/сек
Погрешность из за изменения напряжения питания ±0,2гр/сек
Время переходного процесса перехода гироузла на новое установившееся положение 3-4сек
Погрешность из за несбалансированности ±0,1гр/сек
Отклонение стрелки прибора при плоском развороте с угловой скоростью:
0,6 гр/сек 4±2
1,5 гр/сек 12±2
погрешность при нормальных условиях при крене 15-45гр и угловых скоростях 1,1-4гр/сек 1,5гр
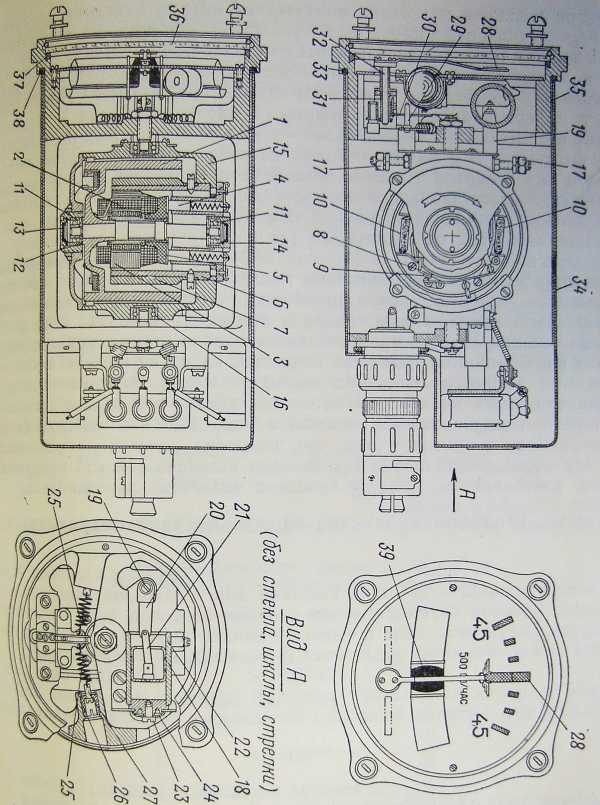
Рис.5.5. Конструкция электрического указателя поворота ЭУП-53.
1—ротор гироскопа, 2—обмотка якоря, 3—якорь, 4—щетка. 5—коллектор, 6—постоянный магнит, 7—магнитопровод, 8—неподвижный контакт центробежного регулятора скорости, 9—подвижный контакт центробежного регулятора скорости, 10—добавочное сопротивление, 11—подшипник ротора, 12—пылезащитная шайба, 13—маслодержательная шайба, 14—резьбовая пробка, 15—кожух гиромотора, 16—подшипник гироузла, 17—балансировочный груз, 18—поршень демпфера, 19— поводок, 20— тяга, 21— шатун, 22— цилиндр демпфера. 25—винт регулировки демпфера, 24—центровочная пружина, 25—упругая пружина, 26—резьбовая втулка, 27— -держатель, 28— стрелка прибора, 29—палец. 30—поводок, 31—втулка поводка, 32—ось стрелки. 33—корпус, 34—алюминиевый кожух;. 35—пермалоевый магнитный экран, 36—стекло, 37—резиновая прокладка, 38—резиновая прокладка, 39- шарик указателя скольжения.
studfiles.net
АКСЕЛЕРОМЕТР
Акселерометр (от лат. accelero — «ускоряю» и греч. metreo — «измеряю») — прибор для измерения ускорений в транспортных наземных машинах различного назначения, а также в летательных аппаратах всех видов, в ракетах и др.
Акселерометр был изобретен в конце XIX в., предназначался для установки в автомобилях и паровозах с целью контроля за скоростью движения. На шкале этого прибора обязательно указывалась предельная величина ускорения (допустимая для данного транспортного средства) с красной отметкой. Это означало, что в случае превышения предельной величины ускорения может наступить разрушение двигателя автомобиля или паровоза, поэтому установка акселерометра обеспечивала безопасную эксплуатацию транспортных наземных средств. Впервые акселерометры были установлены в 1890-х гг. на автомобилях Форда, а затем на автомобилях «Мерседес-Бенц». С развитием паровозостроения в конце XIX — начале XX в. акселерометры стали устанавливаться и на паровозах. Первые акселерометры были тяжелыми и громоздкими, поэтому их конструкции постоянно совершенствовались.
В России акселерометры появились в комплектации с машинами Форда и «Мерседес-Бенц», а также с паровозами германского производства. Но зарубежные акселерометры в зимнее время, особенно в сильные российские морозы, быстро разрушались, поэтому на предприятиях транспортного машиностроения России стали разрабатываться улучшенные модели акселерометров в конструктивном плане, с подбором морозостойких материалов (в первую очередь стали и сплавов). Особое внимание уделялось данным приборам, предназначавшимся для комплектации военной транспортной техники и летательных аппаратов.
Акселерометры, предназначенные для комплектации военной транспортной техники и самолетов, изготавливались из специальных нержавеющих сталей и легких, но прочных сплавов, обеспечивающих безотказную работу в любых условиях и вибрационных нагрузках. В течение XX в. вместе с совершенствованием наземных транспортных средств всех видов, а также авиационной техники вносились определенные изменения и в конструкцию акселерометра. В Советском Союзе модернизацией акселерометров занимались специальные конструкторские бюро (СЬСБ), которые были созданы при оборонных машиностроительных предприятиях в 1940— 1950-х гг. В результате к началу XXI в. было создано несколько разновидностей акселерометров.
Устройство акселерометра основано на принципе использования инерционной силы F, движущейся с ускорением массы (обобщение массы транспортного средства). В его корпусе подвешена определенная масса ограниченного объема, которая взаимодействует через пружины. При ускорении или замедлении корпуса (установленном на жестком креплении к каркасу транспортного средства) масса стремится сохранить свое первоначальное положение, т. е. соответственно «отстать» от корпуса или «опередить» его. Одна из пружин при этом сжимается, а масса совершает относительное перемещение в направлении, противоположном ускорению корпуса. Величина этого перемещения измеряется с помощью потенциометра и пересчитывается на величину ускорения. Для гашения колебаний массы внутри корпуса во время движения транспортного средства служит демпфер. В качестве элементов подвески используют листовые пружины (которые изготавливают из специальной пружинной стали марки 65Г или другой) и шарнирное соединение с корпусом.
Акселерометр по схеме представляет собой маятник со спиральной пружиной. Если в акселерометре по схеме относительное перемещение массы при линейной характеристике пружины пропорционально ускорению, то в маятниковом варианте акселерометра по схеме эта зависимость непропорциональная; но подобный маятниковый прибор характеризуется большой чувствительностью к незначительному ускорению. При малых углах отклонения массы зависимость между ускорением и угловым перемещением можно приближенно считать линейной, но с увеличением угла ошибка, обусловленная непропорциональностью, растет. Наличие бокового ускорения и, соответственно, сил инерции Fy) вызывает искажение результатов измерения ускорения, обусловливаемого силами Fx. Для того чтобы уравновесить момент силы Fy относительно точки подвеса, устанавливают параллельно два маятника, соединенных тягой.
Схема такого соединения представляет собой антипараллелограмм. Конструктивную разновидность антипараллелограмма с высшими парами представляет собой зубчатая пара. В тех случаях, когда необходимо измерить угловое ускорение, ротор устанавливают на оси в корпусе и соединяют со спиральной пружиной. Поворот ротора относительно корпуса при линейной характеристике пружины пропорционален угловому ускорению и измеряется с помощью потенциометра.
В современных транспортных средствах, а также самолетах и ракетах акселерометры связаны в единое целое с бортовыми компьютерами, которые анализируют измеренные величины ускорения и выдают соответствующие команды через исполнительные устройства двигателям с целью корректировки их работы в сторону усиления или уменьшения режима скоростей движения.
(Примечание: антипараллелограммом в технике называется двухкривошипный механизм — шарнирный четырехзвенный механизм, в который входят два кривошипа. Такой механизм служит для передачи и преобразования вращательного движения в поступательное.) В настоящее время в России по заказу потребителей выпускают такие модели акселерометров, как: АМ-В10/ 0; АК-10МГ; АК-15МС и др.
enciklopediya-tehniki.ru
Датчики авионики / ТЕМА 11 / ЛЗ. 11
ДАТЧИКИ ИЗМЕРЕНИЯ ЛИНЕЙНЫХ УСКОРЕНИЙ
Назначение и классификация
ИУ, предназначенные для измерения ускорений летательных аппаратов и вращающихся элементов их агрегатов, называются акселерометрами.
Приборы и датчики линейных ускорений применяются в пилотажных и навигационных системах ВС для решения различных задач, в том числе:
а) для формирования сигнала обратной связи, пропорционального ускорению летательного аппарата, в системах телеуправления траекторией полета;
б) для выдачи предупреждающего сигнала при достижении летательным аппаратом предельно допустимой перегрузки; сигнал может быть использован летчиком или системой автоматического ограничения опасных режимов;
в) для выдачи сигнала на отключение коррекции гировертикали при достижении самолетом заданного ускорения;
г) для выдачи сигналов, пропорциональных ускорению летательного аппарата, в инерциальную систему навигации, где они интегрируются с целью определения путевой скорости и местоположения.
В пилотажных системах датчики должны выдавать информацию о линейных ускорениях по осям x, y, z, связанных с ВС; поэтому датчики линейных ускорений пилотажных систем жестко связываются с ВС, а их оси чувствительности ориентируются по главным осям летательного аппарата.
В инерциальных навигационных системах, в зависимости от их типа, датчики линейных ускорений инерциальных систем навигации устанавливаются на гироскопической платформе, стабилизированной в горизонтальной плоскости, или жестко связываются с летательным аппаратом.
Датчики угловых ускорений используются в системах стабилизации летательного аппарата относительно центра масс, где их сигналы воздействуют на рули для компенсации возмущений. Сигналы датчиков угловых ускорений могут интегрироваться, и в этом случае образуются сигналы, пропорциональные угловой скорости летательного аппарата. Оси чувствительности датчиков угловых ускорений ориентируются по главным осям летательного аппарата.
Для получения полной информации о линейных и угловых ускорениях летательного аппарата необходимо иметь шесть датчиков (три линейных и три угловых), оси чувствительности которых ориентированы по главным осям летательного аппарата и каждый из которых воспринимает соответствующую составляющую линейного или углового ускорения.
В системах телеуправления траекторией полета обычно ограничиваются применением двух датчиков, воспринимающих составляющие линейных ускорений по поперечным осям летательного аппарата.
Акселерометры классифицируются по разным признакам:
по области применения;
по виду подвесов чувствительного элемента;
по способу снятия сигналов;
по числу измеряемых компонентов ускорения;
по виду выходного сигнала и т.д.
Методы измерения ускорений
Измерение линейных ускорений возможно инерциальным методом, методом дифференцирования скорости полета и методом двукратного дифференцирования расстояния до неподвижной базы.
Инерциальный метод заключается в измерении силы, развиваемой инерционной массой при ее движении с ускорением. Приборы и датчики, основанные на этом принципе действия, называются акселерометрами.
В зависимости от способа измерения силы различают акселерометры пружинные и компенсационные.
В пружинных акселерометрах сила, развиваемая инерционной массой, вызывает упругую деформацию пружины, которая создает противодействующую силу. Деформация пружины служит мерой измеряемого ускорения и при необходимости преобразуется в электрический сигнал.
В компенсационных акселерометрах инерционная сила уравновешивается силой, развиваемой магнитоэлектрическим или другим преобразователем. Эта сила пропорциональна силе тока, которая и служит выходным сигналом. Структурная схема таких акселерометров содержит позиционную отрицательную обратную связь.
Инерциальный метод используется также и в интегрирующих акселерометрах, сигнал которых пропорционален интегралу от линейного ускорения за определенный промежуток времени.
Интегрирующие акселерометры отличаются тем, что противодействующая сила является не позиционной, а скоростной. Интегрирующие акселерометры могут быть прямого измерения, в которых противодействующая сила создается демпфером со стабильным коэффициентом демпфирования, и компенсационные, в которых для создания противодействующей силы применяется скоростная обратная связь.
Существуют также компенсационные акселерометры с двукратным интегрированием ускорений; противодействующая сила создается обратной связью по относительному ускорению инерционной массы.
Метод дифференцирования скорости полетазаключается в дифференцировании одним из известных способов сигнала датчика скорости полета. Возможно дифференцирование не только электрических сигналов, но и пневматических. Например, если подать полное давление встречного потока воздуха в вариометр, то показания последнего будут функцией продольного ускорения.
Метод двукратного дифференцирования расстояния до неподвижной базыпригоден в основном для измерения вертикального ускорения и заключается в двукратном дифференцировании одним из известных способов сигнала высотомера.
Измерение угловых ускорений возможно аналогичными методами.
При инерциальном методе измерения инерционная масса подвешивается на оси с одной степенью свободы, проходящей через центр тяжести этой массы. Измеряется момент инерционных сил, развиваемый массой при ее вращении с угловым ускорением. Применимы те же два способа измерения инерционных сил, что и в линейных акселерометрах, – пружинный и компенсационный.
При определении угловых ускорений методом дифференцирования производится дифференцирование сигнала гироскопического датчика угловых скоростей.
Для определения угловых ускорений методом двукратного дифференцирования используется сигнал гироскопического датчика угла.
На летательных аппаратах основное применение нашел инерциальный метод измерения ускорений.
В пилотажных системах датчики должны выдавать информацию о линейных ускорениях по осям х, у, z, связанным с летательным аппаратом; поэтому датчики линейных ускорений пилотажных систем жестко связываются с летательным аппаратом, а
Принцип действия и устройство акселерометра
Принцип действия и устройство датчика измерения ускорения рассмотрим на примере пружинного акселерометра, в качестве чувствительного элемента которого применяется инерционная масса.
Принцип действия пружинного акселерометра с инерционным чувствительных элементов основан на использовании инерционных сил или моментов, возникающих при движении тела определенной массы с ускорением. Зависимость инерционной силы F, действующей на тело, масса которой равна m при наличии ускорения a, как известно, определяют по второму закону Ньютона:
F = m·a
Датчики с инерционными чувствительными элементами применяют также для измерения вибрации, угловой скорости вращения и т.д.
Устройство акселерометра.
Чувствительным элементом акселерометра служит инерционная масса 1, подвешенная на двух пружинах 2, прикрепленных в точках А и В к корпусу 3, жестко связанному с движущимся объектом.
Линия АВ является осью чувствительности акселерометра. Она параллельна той оси движущегося объекта, по которой нужно измерить ускорение х.
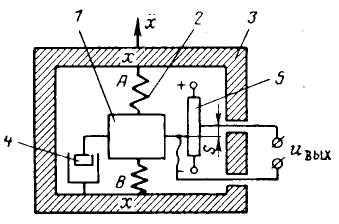
Рис. 11.1. Принципиальная схема пружинного акселерометра
1 – масса; 2 – пружина; 3 – корпус; 4 – демпфер;
5 – потенциометр
При отсутствии ускорений натяжение пружин одинаково и масса располагается в среднем (нейтральном) положении. Если объект движется с постоянным линейным ускорением х, то масса перемещается на некоторую величину, при которой инерционная сила Рин,возникающая вследствие ускоренного движения массы в абсолютном пространстве, уравновешивается силой Рупр упругости пружин.
Для успокоения колебаний инерционной массы в переходном режиме служит демпфер 4, создающий силу, пропорциональную скорости перемещения массы относительно корпуса 3. Применяют магнитоиндукционные, жидкостные или воздушные демпферы.
Требования к акселерометрам в отношении точности измерения определяются областью применения. Так, погрешности акселерометров в инерциальных системах не должны превышать 0,001%. Акселерометры, используемые в системах управления, имеют погрешности на два-три порядка выше. Погрешности акселерометров, применяемых в качестве визуальных приборов, составляют 1÷3%.
Еще одной областью применения акселерометров является их применение в качестве датчиков измерения перегрузки, действующей на самолет в определенном направлении.
Перегрузкой называется отношение поверхностной силы F, действующей в направлении какой-либо оси самолета, к силе веса G. К поверхностным силам относятся подъемная сила, сила сопротивления и сила тяги. Различают перегрузку нормальную (поперечную), равную отношению подъемной силы к силе веса, продольную и боковую.
Перегрузка – величина безразмерная. Иногда говорят, что перегрузка равна, например, 5g. Это означает, что в данном направлении на летательный аппарат и находящихся в нем членов экипажа действует сила, в пять раз превышающая силу веса. Исходя из определения понятия перегрузки, следует говорить о перегрузке, равной 5, а не 5g.
Наибольшее значение для пилотирования ВС играет вертикальная перегрузка.
Сигналы акселерометров используются также в инерциальных навигационных системах для вычисления скоростей и координат, в системах управления полетом и двигателями, а также для индикации текущего и критического значений перегрузки.
Акселерометры, применяемые в системах управления, ориентируются своими осями чувствительности по главным осям лета тельного аппарата. Такие акселерометры измеряют составляющие вектора ускорения по этим осям, а для получения полного вектора необходимо иметь три акселерометра.
В инерциальных системах навигации оси чувствительности акселерометров ориентируются по осям навигационной системы координат, обычно связанной с Землей. В качестве навигационной системы координат может быть взята, например, географическая система, одна из осей которой направлена по меридиану, а вторая ось перпендикулярна к первой в горизонтальной плоскости. При этом два акселерометра с взаимно перпендикулярными осями, расположенными в горизонтальной плоскости, измеряют горизонтальные составляющие вектора ускорения, а один акселерометр, ось чувствительности которого направлена по вертикали, измеряет вертикальное ускорение.
Основными элементами акселерометров являются подвесы инерционных масс (чувствительных элементов), датчики сигналов перемещения массы, моментные (силовые) устройства, обеспечивающие ввод сигналов обратной связи, усилители сигналов и корректирующие устройства (демпферы).
Для того чтобы акселерометр реагировал только на ту составляющую ускорения, для измерения которой он предназначен, его инерционная масса должна иметь специальный подвес, удовлетворяющий следующим требованиям:
минимальное трение в осях подвеса;
отсутствие перекрестных связей между измерительными осями;
обеспечение линейной зависимости между отклонениями инерционной массы и измеряемым ускорением.
Подвесы на простых опорах создают значительное трение, которое снижает чувствительность акселерометра. Для уменьшения трения чувствительный элемент укрепляют на рычаге или помещают в жидкость с удельным весом, равным удельному весу чувствительного элемента.
Перспективными являются электромагнитные и криогенные подвесы.
Для преобразования перемещений в электрические сигналы в акселерометрах применяются потенциометрические, индуктивные, емкостные, фотоэлектрические и струнные преобразователи.
Основные требования к преобразователям следующие:
1) большая разрешающая способность;
2) линейная зависимость выхода от входа;
3) отсутствие реакции преобразователя на чувствительный элемент.
Этим требованиям не удовлетворяют потенциометрические датчики, поэтому в точных приборах они не применяются.
В качестве моментных (силовых) устройств в акселерометрах для ввода сигналов обратных связей применяются моментные двигатели (электродвигатели, работающие в заторможенном режиме) и электромагнитные устройства.
Для получения акселерометров с требуемыми частотными характеристиками в цепях обратной связи применяют корректирующие фильтры и специальные демпферы. В приборах с жидкостным подвесом для демпфирования используется вязкость самой жидкости.
В качестве примера рассмотрим однокомпонентный акселерометр.
На схеме рис. 11.2 сейсмическая масса 1 подвешена на направляющей 4. Для уменьшения трения о направляющую масса 1, помещенная в жидкость 3, имеет нейтральную плавучесть, что исключает сильное прижатие к направляющей. Сигналы в рассматриваемой схеме, пропорциональные перемещению сейсмической массы, измеряются индуктивным датчиком 6. После усиления в усилителе 5 сигнал поступает на электромагнитный (силовой) привод 7. Выходным сигналом акселерометра является падение напряжения и на сопротивлении R, включенном последовательно в цепь обмотки силового привода. Демпфирование в приборе получается за счет сопротивления при движении сейсмической массы в жидкости.
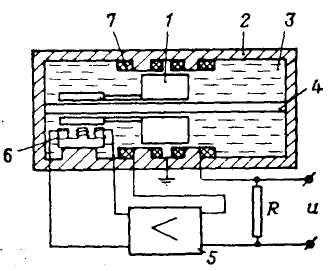
Рис. 11.2. Схема однокомпонентного акселерометра:
1 – инерционная масса; 2 – корпус; 3 – жидкость; 4 – направляющий стержень; 5 – усилитель; 6 – индуктивный датчик перемещения; 7 – электромагнитный привод
В акселерометрах рассматриваемого типа можно получить высокую собственную частоту и малую зону нечувствительности. Последнее достигается уменьшением сил трения за счет взвешивания инерционной массы в жидкости. Для сохранения постоянства характеристик акселерометра необходимо поддерживать температуру жидкости постоянной, что достигается термостатированием.
Погрешности акселерометров
Акселерометрам присущи методические и инструментальные погрешности.
Методические погрешности акселерометров можно разделить на две группы:
1) погрешности, возникающие из-за того, что акселерометры измеряют только ускорения от активных сил, тогда как на ускорения, вызванные гравитационными силами, эти приборы не реагируют;
2) погрешности, возникающие из-за несовпадения оси чувствительности с направлением действия измеряемого ускорения.
Для оценки величин методических погрешностей первой группы предположим, что на летательном аппарате выбрана инерциальная система координат Oxyz, начало которой совпадает с центром масс. Совместим с осями этой системы оси чувствительности трех акселерометров (инерциальная система координат на ЛА может быть построена при помощи стабилизированной гироплатформы). На летательный аппарат действует сила веса G и сила Q, равная сумме сил тяги, сопротивления, подъемной силы и др
Спроектировав эти силы на оси инерциальной системы координат, можно написать уравнения движения летательного аппарата:
где М – масса ВС и х, у, z – координаты центра масс. Эти уравнения можно переписать в виде
gx, gv, gz – составляющие гравитационных ускорений.
Акселерометры измеряют ускорения ах, ау, аг, вызываемые активными силами Qx, Qy, Qz.
Для вычисления скоростей и координат местоположения ВС по измеренным ускорениям необходимо от показаний акселерометров отнять составляющие гравитационных ускорений. Следовательно, на величины gx, gv, gz можно смотреть как на методические погрешности акселерометров. Поскольку структура гравитационного поля Земли и планет известна с большой точностью, то по известному местоположению ВС можно определить ускорения gx, gy, gz и внести соответствующие поправки в показания акселерометров. В инерциальных системах навигации и управления учет методических погрешностей акселерометров именно так и выполняется.
При несовпадении оси чувствительности акселерометра с направлением измеряемого ускорения возникают методические погрешности. Так, например, при несовпадении оси чувствительности и направления ускорения в 1° погрешность в измерении величины ускорения составляет 0,02%. Эта погрешность сама по себе мала и не представляет большого интереса. Большее значение имеет угол между указанными направлениями, поскольку он определяет несовпадение приборной и истинной осей системы координат. Кроме того, в инерциальных системах навигации несовпадение осей чувствительности с направлением измеряемых ускорений приводит к появлению перекрестных связей между акселерометрами, в результате чего акселерометр измеряет не только «свое», но и «чужие» ускорения. Это опять вызывает погрешности в измерении ускорений.
Инструментальные погрешности акселерометров определяются:
1) порогом чувствительности (обусловленным трением в подвесах) – минимальным сигналом на входе, при котором появляется сигнал на выходе;
2) нарушением линейной зависимости между входным и выходным сигналами;
3) гистерезисом в характеристиках упругих и других элементах;
4) температурной зависимостью параметров и характеристик акселерометра.
Для уменьшения инструментальных погрешностей применяются меры по уменьшению трения в подвесах, по термостатированию элементов и по улучшению характеристик чувствительности акселерометра. В лучших конструкциях акселерометров для инерциальных систем инструментальные погрешности доведены до 0,002%.
studfiles.net
Прибор для измерения ускорений
Класс 42о, 17
Л )0412
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
K АВТОРСКОМУ СВИДЕТЕЛЬСТВУ.
ВЫДАННОМУ НАРОДНЫМ NONNCt:APHATOM ТЯИЕЛОЙ ПРОМЫШЛЕННОСТИ.»-.apezucn.даровано в Государсаиенно.я бюро атос.гедующей региссира.;ии изоб:ешений ири Госл.,аве C
Прибор для измерения ускорений.
Заявлено а февраля 1936 года за ла 186150.
Опубликовано 28 февраля 1937 года.
Предмет изобретения.
Известны приборы для измерения ускорений (акселерометры), основанные на инерции масс, в которых инерционная масса, в виде поршня, делит сосуд с жидкостью на две части,, каждая из которых соединена с ма- нометром.
В предлагаемом приборе для изме- рения ускорения инерционная масса укреплена на средней части упругой мембраны, разделяющей сосуд на две части.
На чертеже изображена схема прибора для измерения ускорений.
Измерение ускорений основано на изменении объема в двух частях соf суда, перегороженного пругои мемораной 1, под действием инерционной массы в виде груза 2, который укреплен на средней части мембраны, выполненной, например, из резины, гофрированного металла и т. п.
Сосуд заполнен жидкостью и каждая его часть снабжена жидкостным манометром 3.
Прибор укрепляют на движущемся теле так, чтобы плоскость упругой мембраны 1 была перпендикулярна к направлению движения.
Каждому ускорению движущегося тела будет соответствовать определенное смешение груза 2 вместе с упругой мембраной в сторону, обратную направлению движения.
Это перемещение мембраны под действием инерционной массы приводит к изменению объемов в частях сосуда, что, со своей стороны, вызовет изменение уровней жидкости в стеклянных трубках жидкостных манометров 3. Разность уровней, определяемая по шкале 4, служит мерой ускорения.
В конструкции прибора должны быть предусмотрены краны для обеих частей сосуда и установочные винты, позволяющие придавать стеклянным трубкам определенные углы наклона и тем изменять чувствительность прибора. Станина прибора должна иметь крепительные приспособления для связи с движущимся телом и уровни для контроля установки.
Прибор должен быть предварительно градуирован.
Прибор для измерения ускорений, основанный на инерции масс и состоящий из инерционной массы, разделяющей сосуд, наполненный жидкостью, на две части, каждая из которых снабжена манометром, отличающийся тем, что инерционная масса укреплена на средней части упругой мембраны, разделяющей сосуд на две части.
www.findpatent.ru
Принцип работы акселерометров
Акселерометр – это измерительный прибор. С его помощью можно фиксировать и анализировать вибрации, а также движение и ускорение. С прибором напрямую связано понятие «кажущейся силы», так вот назначение акселерометра в его измерении.
Кажущейся силой называют геометрическую разницу между реальным ускорением объекта и ускорением силы гравитации нашей планеты. Понятие применяется в системах инерционной навигации.
ТРЕХОСЕВОЙ АКСЕЛЕРОМЕТР: ПРИНЦИП РАБОТЫ
Акселерометры различаются по типу выхода (аналоговые и цифровые), по частотным диапазонам, а также по количеству осей.
Трёхосный акселерометр способен показывать частоты, периоды и формы собственных колебаний зданий и сооружений. Прибор позволяет анализировать ускорение, действующее в направлении сразу трёх осей. В некоторых случаях такое измерение является единственным способом получить необходимую информацию в полном объёме.
Под крышкой корпуса такого акселерометра располагают пьезоэлементы. Они должны находится симметрично вдоль осей, находящихся перпендикулярно.
Пьезоэлемент и принципы его работы
Этот вид акселерометров считается своего рода «лидером». Ведь любое другое подобное устройство сильно уступает ему в точности, ширине как рабочего, так и частотного диапазонов. Более того, пьезоэлеметные приборы отличает прочность и надёжность.
Ещё одним плюсом такого устройства считается то, что в процессе его использовании нет необходимости искать способ подключиться к электрической сети, аккумулятору или какой-либо источник питания. Отсутствие движущихся элементов даёт возможность говорить об очень низкой степени износа прибора.
Если говорить о механике работы такого прибора, то это активные датчики, которые генерируют электросигнал, пропорциональный колебаниям. Главным элементом в таком акселерометре считается компонент, который подвергается воздействию. Так появляется электрический заряд, пропорциональный силе, воздействующей на него.

оптимальное решение!
СД-1Э — трехкоординатный акселерометр, предназначенный для мониторинга зданий и сооружений, плотин, мостов, нефтяных платформ и трубопроводов.
У нас есть и готовые решения на базе СД-1Э:
Акселерометр СД-1Э + АЦП
Акселерометр СД-1Э + АЦП + Программное обеспечение
www.smis-expert.com
Глава 10. Методы и приборы для измерения ускорения силы тяжести
нитей подвеса /. При IB\!cнci!IIII сн.1ы тяжестн ~аятник
поворачивается. Также IЮiюрач11ваетсн жестко скреплен
ный вместе с ним Г-образныйсгержень/0, являющийся
индекса\! прибора, I<аторый при отсчетах сою1ещается со
шкалой .
.Микроскоп ю1еет окулярную шкалу, по одному из
штрихов которой устанавливается индекс. Наблюдения с
гравиметром осуществляют нулевы\1 метода~. Для этого
при изменении натяжения ко\шенсацнонной (или диапазон
ной) пруживы поворачнвают рюtку 4, которая в свою
очередь поворачивает кронштейн 11 I!З\Iсняет натнжениеглавной пружнны 9.
При изменении те:-.шературымаятник2 также повора
чивается. Например, при повышении те~пературы ~антник
несколько поднимается вверх, одновременно с этим тем
пературный компенсатор 6, 7 удлиннется и поворачивает его вокруг нитей5 (против часовой стрелки), уменьшая
тем самым натяжение главной пруживы 9. TaiOi\1 образом,
перемещение маятника нод действием температуры в одну
сторону компенсируется поворотом его с помощью темпе
ратурного КО:\Шенсатора в другую сторону .
.Металлическая нить компенсатора имеет дугообразную форму. ~о позволнет скомпенсировать нелинейную часть температурных изменений гравиметра. Температурная ком
пенсация гравиметра Уордена такова, что в двадцатигра
дусном рабочем диапазоне температурный коэффициент
системы не превышает 0,3 мГал на1 «С. Погрешность из
мерения гравиметром колеблется от +(),02 до±0,08 мГал в зависимости от качества экземпляра н применяемой ме
тодики. Диапазон измерения силы тяжести с помощью
компенсационной пруживы составляет около 100 мГал.
Диапазонное устройство позволяет производить измерения
в пределах 3000-5000 мГал. Упругая снетема гравиметра
Уордена приведена на рис. 83.
В последнее вpeli.IЯ фирма модернизировала гравиметр
и в настоящее вреl\НI выпускает четыре модели: «Мастер»,
«Проспектор» (рис. 84), «Эдьюкейтор» и «Геодезист». «Ма
стер» и «Геодезист» имеют электрические термостаты. «Эдью
кейтор» является облегченной моделью. Его масса всего
2,3 кг, диапазон измерения1600 :-.1Гал,цена деления шкалы0,3-1 мГал (погрешность отсчета0,1 деления). Он удобен для съемок, не требующих высокой точностн и особенно
для тренировочных работ, напрнмер студенческой прак
тикн. «Проспектор» предназначен для ~1ассовых разведоч
ных съемок, он достаточно точный и легкий. «Геодезист»
studfiles.net
Leave A Comment