
Открытая Физика. Равномерное движение
Простейшим видом механического движения является движение тела вдоль прямой линии с постоянной по модулю и направлению скоростью. Такое движение называется равномерным. При равномерном движении тело за любые равные промежутки времени проходит равные пути. Для кинематического описания равномерного прямолинейного движения координатную ось OX удобно расположить по линии движения. Положение тела при равномерном движении определяется заданием одной координаты x. Вектор перемещения и вектор скорости всегда направлены параллельно координатной оси OX. Поэтому перемещение и скорость при прямолинейном движении можно спроектировать на ось OX и рассматривать их проекции как алгебраические величины.
Если в некоторый момент времени
Эта величина может быть и положительной и отрицательной в зависимости от направления, в котором двигалось тело. При равномерном движении вдоль прямой модуль перемещения совпадает с пройденным путем. Скоростью равномерного прямолинейного движения называют отношение υ=ΔsΔt=x2-x1t2-t1=const.
Если υ > 0, то тело движется в сторону положительного направления оси OX; при
Зависимость координаты x от времени t (закон движения) выражается при равномерном прямолинейном движении линейным математическим уравнением:
x (t) = x0 + υt.
В этом уравнении υ = const – скорость движения тела, x0 – координата точки, в которой тело находилось в момент времени t = 0. График закона движения x(t) представляет собой прямую линию. Примеры таких графиков показаны на рис. 1.3.1.
Для закона движения, изображенного на графике I (рис. 1.3.1), при t = 0 тело находилось в точке с координатой x0 = –3. Между моментами времени t1 = 4 с и t2 = 6 с тело переместилось от точки x1 = 3 м до точки x2 = 6 м. Таким образом, за Δt = t2 – t1 = 2 с тело переместилось на Δs = x2 – x1 = 3 м. Следовательно, скорость тела составляет υ=ΔsΔt=1,5 м/с.
Величина скорости оказалась положительной. Это означает, что тело двигалось в положительном направлении оси OX. Обратим внимание, что на графике движения скорость тела может быть геометрически определена как отношение сторон
Чем больше угол α, который образует прямая с осью времени, т. е. чем больше наклон графика (крутизна), тем больше скорость тела. Иногда говорят, что скорость тела равна тангенсу угла α наклона прямой x (t). С точки зрения математики это утверждение не вполне корректно, так как стороны BC и AC треугольника ABC имеют разные размерности: сторона BC измеряется в метрах, а сторона AC – в секундах.
Аналогичным образом для движения, изображенного на рис. 1.3.1 прямой II, найдем
На рис. 1.3.2 закон движения x (t) тела изображен с помощью отрезков прямых линий. В математике такие графики называются кусочно-линейными. Такое движение тела вдоль прямой не является равномерным. На разных участках этого графика тело движется с различными скоростями, которые также можно определить по наклону соответствующего отрезка к оси времени. В точках излома графика тело мгновенно изменяет свою скорость. На графике (рис. 1.3.2) это происходит в моменты времени t1 = –3 с, t2 = 4 с
Такое движение тела вдоль прямой не является равномерным. На разных участках этого графика тело движется с различными скоростями, которые также можно определить по наклону соответствующего отрезка к оси времени. В точках излома графика тело мгновенно изменяет свою скорость. На графике (рис. 1.3.2) это происходит в моменты времени t1 = –3 с, t2 = 4 с
Следует отметить, что при кусочно-линейном законе прямолинейного движения тела пройденный путь l не совпадает с перемещением s. Например, для закона движения, изображенного на рис. 1.3.2, перемещение тела на интервале времени от 0 с до 7 с равно нулю (s = 0). За это время тело прошло путь
Материальная точка движется вдоль координатной оси ОХ по гармоническому закону х 0,1 sin( t) м. Определите среднюю скорость на пути, пройденном материальной точкой за время от t 1с до t 1,5с.
Марафон по решению задач на тему: « Механические колебания».Материальная точка совершает гармонические колебания, описываемые уравнением х = 0,05sin(13 EMBED Equation.3 1415t/4), где х и t измеряются в системе СИ. Сколько полных колебаний N совершит точка за время 13 EMBED Equation.3 1415= 80с? Какой путь она при этом пройдёт?
Материальная точка движется вдоль координатной оси ОХ по гармоническому закону х = 0,1 sin( 13 EMBED Equation.3 1415 t) м. Определите среднюю скорость на пути, пройденном материальной точкой за время от t13 EMBED Equation.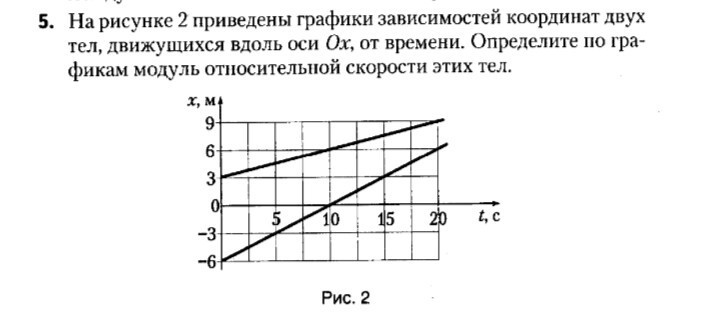
Материальная точка совершает гармонические колебания. Максимальная скорость точки 9,4 м/с. Определите среднюю скорость точки за минимальное время перемещения из одного крайнего положения в другое.
Груз массой 100г, подвешенный на пружине жёсткостью 20 Н/м, совершает вертикальные колебания. С каким ускорением движется груз в момент времени, когда пружина растянута на х = 2 см?
Тело массой 0,5г совершает колебания по закону х = 0,1 cos(2013 EMBED Equation.3 1415t) м. Определите максимальное значение возвращающей силы.
Во сколько раз изменится период колебаний математического маятника, если его поднять с уровня моря на Эверест (Н =8,9 км)?
Груз, подвешенный на длинной лёгкой пружине, совершает колебания с периодом 1с. Затем пружина перерезается пополам и груз подвешивается к одной из её половин. Определите период колебаний груза в этом случае.
К нижнему концу закреплённой в верхней точке нерастянутой пружины жёсткостью 225 Н/м прикрепили груз массой 1кг и без толчка отпустили. Через какое время при движении груза вниз его скорость достигнет максимального значения?
Приложенные файлы
- 4851237
Размер файла: 29 kB Загрузок: 1
задачи_семинара2_2012
СЕМИНАР 2 ДИНАМИКА МАТЕРИАЛЬНОЙ ТОЧКИ И ПОСТУПАТЕЛЬНО ДВИЖУЩЕГОСЯ ТВЕРДОГО ТЕЛА
Инерциальные системы отсчета
Важная роль выбора системы отсчета
впервые продемонстрирована Коперником
(около 1500г.
Первый закон Ньютона содержит не только закон инерции Галилея, но и определение инерциальной системы отсчета:
Существуют такие системы отсчета, назовем их инерциальными (ИСО), в которых тело, изолированное от других тел, сохраняет свою скорость постоянной.
Нахождение силы из закона движения.
Импульсом материальной точки называется величина, равная произведению массы точки на ее скорость . По определению, сила – это величина, показывающая, как быстро изменяется импульс материальной точки со временем, то есть
,
причем последние два равенства справедливы, если масса тела постоянна.
2.1. Материальная точка массой 1 кг движется по прямой линии со скоростью, величина которой зависит от времени по закону . Вычислите величину силы, действующей на материальную точку через
2.3. Материальная точка движется вдоль координатной оси OX в соответствии с законом . В начальный момент на материальную точку действует сила, проекция которой на координатную ось равна 2Н. Вычислите проекцию силы FX в момент изменения направления движения.
2.4. Материальная
точка движется вдоль координатной оси OX в соответствии с
законом
,
здесь c и k — постоянные величины. В начальный момент
на материальную точку действует сила,
проекция которой на координатную ось
равна F(0). Найдите
проекцию силы FX в тот момент, когда материальная точка
опять проходит через начало координат.
В начальный момент
на материальную точку действует сила,
проекция которой на координатную ось
равна F(0). Найдите
проекцию силы FX в тот момент, когда материальная точка
опять проходит через начало координат.
Интегрирование уравнения движения. Сила линейно зависит от времени.
— уравнение движения материальной точки в векторной форме. В проекции на оси прямоугольной системы координат уравнения движения принимают вид
; ;
Интегрируем соответствующее дифференциальное уравнение методом разделения переменных.
2.6. Материальная точка массы m = 1кг начинает двигаться под действием силы . Вычислите модуль скорости материальной точки в момент времени t = 2c.
2.7. Брусок начинает скользить по гладкой наклонной плоскости, составляющей угол α с горизонтом. Навстречу бруску вдоль наклонной плоскости дует усиливающийся ветер так, что сила сопротивления, действующая на брусок, пропорциональна времени: F = b∙t. Здесь b – постоянная величина. Найдите время τ, через которое брусок остановится.
2.8. Брусок массы m покоится на гладкой горизонтальной плоскости. На брусок начинает действовать сила, величина которой пропорциональна времени: F = ct. Здесь c – постоянная величина. Направление силы составляет постоянный угол α с горизонтом. Найдите величину скорости бруска в момент его отрыва от плоскости.
Интегрирование уравнения движения. Сила зависит от времени по гармоническому закону.
2.10. Тело массы 2 кг начинает двигаться под действием силы . Вычислите скорость тела в момент t = π с.
2.11. Материальная
точка начинает двигаться под действием
силы
.
Вычислите время τ движения материальной
точки до первой остановки.
2.12. Материальная точка массы m начинает двигаться в момент t = 0 под действием силы . Здесь и ω – постоянные величины. Сколько времени τ материальная точка будет двигаться до первой остановки? Найдите путь s, пройденный материальной точкой за это время.
Интегрирование уравнения движения. Сила зависит от координаты.
В уравнении движения делаем замену. Тогда уравнение принимает вид , то есть переменные разделились и можно выполнить интегрирование.
2.14. Тело движется вдоль координатной оси X под действием силы трения, проекция которой на ось X равна . Вычислите величину скорости при x = 0, если при x = 3 м тело остановилось. Масса тела m = 1 кг.
2.15. Материальная точка массы m движется вдоль координатной оси X под действием силы, проекция которой Fx находится по формуле Fx = —k∙x. В начальный момент времени x(0) = xm, vx(0) = 0. Найдите зависимость vx(x).
2.17. Тело упало с высоты, равной радиусу Земли. Вычислите скорость тела перед приземлением. Гравитационная постоянная, масса Земли и ее радиус равны соответственно 6,710-11; 61024; 6,4106 .
2.18. Тело бросили вертикально вверх и оно поднялось на высоту равную радиусу Земли. Вычислите необходимую для этого начальную скорость. Гравитационная постоянная, масса Земли и ее радиус равны соответственно 6,710-11; 61024; 6,4106 .
Интегрирование уравнения движения. Сила линейно зависит от скорости.
2.21. Лодка
массой m = 150 кг движется
в озере со скоростью под действием силы сопротивления
. Вычислите время τ, за которое скорость
лодки уменьшится в 2,7 раза.
Вычислите время τ, за которое скорость
лодки уменьшится в 2,7 раза.
2.22. Лодка массой m =150кг движется в озере со скоростью 0,2 м/с под действием силы сопротивления . Вычислите длину пути s лодки до остановки.
Неинерциальные системы отсчета
Система отсчета, относительно которой материальная точка движется с ускорением, при условии, что на эту точку не действуют другие тела, называется неинерциальной (НСО).
Можно сказать иначе. Система отсчета, которая движется поступательно с ускорением и/или вращается относительно инерциальной системы отсчета (ИСО), называется неинерциальной (НСО).
Введем следующие обозначения:
, — скорость и ускорение материальной точки относительно неинерциальной S — СО;
— радиус-вектор материальной точки относительно неинерциальной S — СО;
— ускорение неинерциальной S — СО относительно инерциальной S – СО в поступательном движении;
, — угловая скорость и угловое ускорение неинерциальной S — СО относительно инерциальной S – СО во вращательном движении.
В этих обозначениях уравнение движения материальной точки в неинерциальной системе отсчета имеет вид:
.
В правой части уравнения:
— сумма всех сил, действующих на материальную точку со стороны других тел, то есть тех сил, которые определены в рамках системы законов Ньютона;
— сила инерции, действующая в НСО, движущейся поступательно с ускорением ;
— сила инерции, действующая в НСО, вращающейся с угловым ускорением;
— центробежная сила инерции, действующая в НСО, вращающейся с угловой скоростью ;
— сила инерции Кориолиса,
действующая в НСО, вращающейся с угловой
скоростью
,
если материальная точка движется
относительно НСО со скоростью
и при условии, что векторы
и составляют угол, не равный 00 или 1800.
Центробежная сила инерции.
2.28. Земля – неинерциальная система отсчета (НСО) во — первых потому, что она вращается вокруг собственной оси, проходящей через ее полюса – это суточное движение, и во — вторых потому, что она движется по почти что окружности вокруг Солнца, с которым связана ИСО – это годовое движение. Оцените ускорения точки земного экватора относительно ИСО по первой a1 и, отдельно, по второй a2 причине. Считайте, что радиус Земли равен R1 = 6,4∙106м, расстояние от Земли до Солнца равно R2 = 1,5∙1011м. Вычислите отношения a1/ a2 , a1/ g, a2/ g, полагая, что g = 9,81м/с2.
2.29. Над некоторой точкой экватора постоянно “висит” геостационарный спутник Земли. Почему он не падает на Землю с точки зрения земного наблюдателя? Принимая во внимание, что масса M Земли, гравитационная постоянная G и длительность земных суток T равны соответственно 6∙1024кг; 6,7∙10-11м3/(кг∙с2) и 8,64∙104c, вычислите расстояние r от центра Земли до спутника.
Сила инерции Кориолиса.
2.30. Поезд массы m = 2∙106 кг движется на северной широте φ = 600. Найдите величину и направление силы бокового давления поезда на рельсы, если он движется вдоль меридиана на Север со скоростью = 54 км/ч.
Центробежная сила инерции и сила инерции Кориолиса.
2.33. Многие
полагают, что Солнце движется вокруг
Земли (а не Земля вокруг Солнца) по
окружности радиуса R = 1,5∙1011м,
делая один оборот за время T = 8,64∙104c
(земные сутки), причем соответствующее
центростремительное ускорение создается
только силой, описываемой законом
тяготения. Принимая во внимание, что
масса Земли и гравитационная постоянная
равны соответственно M = 6∙1024кг
и G = 6,7∙10-11м3/(кг∙с2),
убедитесь в том, что такая сила не может
обеспечить необходимое ускорение. Какую
ошибку мы делаем, рассуждая таким
образом? Покажите вычислениями, какие
силы действительно формируют
центростремительное ускорение Солнца
с точки зрения земного наблюдателя.
Принимая во внимание, что
масса Земли и гравитационная постоянная
равны соответственно M = 6∙1024кг
и G = 6,7∙10-11м3/(кг∙с2),
убедитесь в том, что такая сила не может
обеспечить необходимое ускорение. Какую
ошибку мы делаем, рассуждая таким
образом? Покажите вычислениями, какие
силы действительно формируют
центростремительное ускорение Солнца
с точки зрения земного наблюдателя.
2.34. Гладкий горизонтальный диск вращают с угловой скоростью Ω = 5 рад/с вокруг вертикальной оси, проходящей через его центр. В центр диска поместили небольшую шайбу массой m = 60 г и сообщили ей начальную горизонтальную скорость = 2,6 м/с. Найдите величину F силы Кориолиса, действующей на шайбу в системе отсчета “диск”, через время t = 0,5 c после начала ее движения.
2.35. Человек массы m = 60 кг идет равномерно по периферии горизонтальной круглой платформы радиуса R = 3 м, которую вращают с угловой скоростью Ω = 1 рад/с вокруг вертикальной оси, проходящей через ее центр. Найдите горизонтальную составляющую F силы, действующей на человека со стороны платформы, если сумма сил инерции, приложенных к нему в системе отсчета “платформа”, равна нулю.
2.36. Горизонтальный диск вращают с угловой скоростью Ω = 20 рад /с, направленной вертикально. По радиусу диска от его центра движется небольшое тело массой m = 0,1 кг с постоянной скоростью =3 м/с относительно диска. Вычислите величину каждой силы инерции, действующей на тело в момент, когда оно удалено от оси вращения на расстояние r = 0,2 м.
2.37. Горизонтальный
диск вращают с угловой скоростью Ω = 3
рад /с, направленной вертикально. По
радиусу диска от его центра движется
небольшое тело массой m = 0,2 кг с постоянной скоростью
=
2 м/с относительно
диска. Вычислите величину F суммы сил инерции, действующих на тело
в момент, когда оно удалено от оси
вращения на расстояние r = 1 м.
2.38. Стержень длиной l = 0,2 м вращают в горизонтальной плоскости равномерно с угловой скоростью Ω = рад/с вокруг вертикальной оси, проходящей через его конец. Вдоль стержня от оси вращения из состояния покоя без трения движется муфта массой m = 0,1 кг. Вычислите величину F силы Кориолиса, действующую на муфту, когда она проходит середину стержня.
2.39. Горизонтальный стержень длиной l = 0,2 м вращают с угловой скоростью Ω = рад/с вокруг вертикальной оси, проходящей через его конец. Вдоль стержня от оси вращения из состояния покоя без трения движется муфта. Вычислите величину скорости муфты относительно лаборатории в момент, когда она покидает стержень.
Ответы
2.1 Н.
2.3 Н.
2.4 .
2.6 м/с.
2.7
2.8
2.10 м/с.
2.11 с.
2.12
2.14 м/с.
2.15
2.17 км/с.
2.18 км/с.
2.21 с.
2.22 м.
2.28 м/с2.
м/с2.
.
.
.
2.29 Геостационарный спутник покоится относительно неинерциального земного наблюдателя под действием двух равных по величине и противоположно направленных сил : силы притяжения к Земле и центробежной силы инерции.
км.
2.30 Пусть поезд идет на север. Под
действием силы инерции Кориолиса,
направленной на восток, колеса будут
давить на восточный рельс с силой, равной
силе Кориолиса.
Н.
2.33 Ускорение Солнца при движении вокруг Земли равно
м/с2.
Сила притяжения Солнца к Земле создает ускорение
м/с2,
что в раз меньше необходимого. Ошибочным является предположение о том, что с Землей связана ИСО. Признание неинерциальности (из-за суточного вращения Земли) земной системы отсчета, приводит к необходимости учета силы Кориолиса, действующей на Солнце в направлении к Земле:
и центробежной силы инерции, действующей на Солнце в направлении от Земли:
Из приведенных вычислений видно, что ускорение м/с2 при движении Солнца вокруг Земли обеспечивается силами инерции м/с2,
а сила тяготения “вносит вклад” на 10 порядков меньший и ее в этой проблеме можно не учитывать. (Интересно, какое яблоко должно было упасть на голову И.Ньютону, сидящему под яблоней, чтобы он открыл закон всемирного тяготения, пользуясь земной системой отсчета?!)
2.34 Н.
2.35 Н.
2.36 Н.
Н.
2.37 Н.
2.38 Н.
2.39 м/с.
Задачи для семинара. В скобках домашнее задание.
2.4 (2.1, 2.3)
2.8 (2.6, 2.7)
2.12 (2.10, 2.11)
2.15, 2.18 (2.14, 2.17)
2.21, 2.22
2.29 (2.28)
2.30
2.34, 2.35, 2.39 (2.33, 2.36, 2.37, 2.38)
6
А1 Тело движется прямолинейно вдоль оси ОХ
Вариант № 12
А1.Тело движется прямолинейно вдоль оси ОХ. На графике показана зависимость координаты х тела от времени t. Средняя скорость тела на всем пути, пройденном за 30 с, равна
На графике показана зависимость координаты х тела от времени t. Средняя скорость тела на всем пути, пройденном за 30 с, равна
1) 0,7 м/с 2) 2 м/с 3) 4 м/с 4) 8 м/с 5) 12 м/с
А2. Шарик начинает двигаться по наклонному прямолинейному желобу из состояния покоя с постоянным ускорением 2 см/с2 . За третью секунду своего движения шарик переместится на расстояние, равное
1) 2 см 2) 3 см 3) 4 см 4) 5 см 5) 6 см
A3. Мяч брошен с начальной скоростью 20 м/с под углом 30° к горизонту. Максимальная высота подъема мяча равна
1) 3 м 2) 5м 3) 10 м 4) 12 м 5) 20 м
А4. На концах нити, переброшенной через блок, висят два груза массой М=250г каждый (см. рис.). Нить считать невесомой и нерастяжимой, массой блока пренебречь, трение в блоке не учитывать. Если на один из них положить перегрузок массой m, то грузы начнут двигаться с ускорением а = 2 м/с2 , при этом сила натяжения нити АВ во время движения грузов равна
1) 2,5 Н 2) 3,0 Н 3) 4,0 Н 4) 5,0 Н 5) 6,0 Н
А5. Спутник, летящий вокруг некоторой планеты по круговой орбите радиусом г=4,6 109 м, имеет постоянную по модулю скорость
V = 1,1 104 м/с. Масса планеты равна
1) 4 1027 кг 2) 5 1027 кг 3) 61027 кг 4) 7 1027 кг 5) 8 1027кг
А6. Груз массой 200 г, прикреплённый к концу невесомого стержня длиной 10 см, равномерно вращается в вертикальной плоскости вокруг другого конца стержня. Стержень разрывается при силе натяжения, направленной вдоль оси, равной по модулю 10 Н. Чтобы стержень оставался целым, его можно вращать с угловой скоростью, максимальная величина которой равна
1) 20 рад /с 2) 35 рад /с 3) 40 рад /с 4) 45 рад /с 5) 50 рад /с
А7. Шар движется со скоростью V (относительно Земли) и сталкивается с точно таким же шаром. Если второй шар перед столкновением двигался в том же направлении, что и первый шар, но в 2 раза медленнее, то после неупругого столкновения скорость их совместного движения будет равна
1) 0,25V 2) 0,50V 3) 0,67V 4) 0,75V 5) 1,5V
А8. На горизонтальной поверхности тележки, масса которой М = 6 кг, лежит брусок массой m = 2 кг. Коэффициент трения между бруском и тележкой = 0,3. С каким минимальным ускорением а должна двигаться тележка, чтобы брусок начал скользить по ее поверхности?
На горизонтальной поверхности тележки, масса которой М = 6 кг, лежит брусок массой m = 2 кг. Коэффициент трения между бруском и тележкой = 0,3. С каким минимальным ускорением а должна двигаться тележка, чтобы брусок начал скользить по ее поверхности?
1) 0,2 м/с2 2) 0,6 м/с2 3)1, 8 м/с2 4) 2,4 м/с2 5) 3,0 м/с2
А9. На тело массой m = 3 кг, лежащее на гладкой горизонтальной поверхности, действует переменная по модулю сила, направленная горизонтально вдоль оси ОХ. График зависимости проекции ускорения тела ах от его координаты х представлен на рисунке. Работа силы при перемещении тела на расстояние 6 м равна
1) 10 Дж 2) 14 Дж 3) 30 Дж 4) 36 Дж 5) 42 Дж
А10. Камень объемом 0,5 м3 медленно и равномерно поднимают в воде на высоту 1 м. Плотность камня р = 2,5 103 кг/м3, плотность воды 103 кг/м3. При этом совершается работа, равная
1) 2,5 кДж 2) 5,0 кДж 3) 7,5 кДж 4) 12,5 кДж 5) 15,0 кДж
А 11. 1 моль идеального газа находится при нормальных условиях (р = 105 Па, t = 0°C). Кинетическая энергия поступательного движения всех молекул этого газа равна
1) 2,9 кДж 2) 3,1 кДж 3) 3,4 кДж 4) 3,7 кДж 5) 4,1 кДж
А12. При изобарном процессе при увеличении абсолютной температуры идеального газа в два раза его плотность
1) не изменяется 2) уменьшается в 2 раза 3) уменьшается в 4 раза 4) увеличивается в 2 раза 5) увеличивается в 4 раза
А13. При температуре 27°С в сосуде емкостью V1 = 5 л содержится азот (М = 28 г/моль) под давлением р1 = 105 Па. Сосуд соединили с другим пустым сосудом, вместимость которого V2 = 3 л. Плотность газа в сосудах стала равной
1)0,3 кг/м3 2) 0,5 кг/м3 3)0,7 кг/м3 4) 0,9 кг/м3 5) 1,2 кг/м3
А14. Один моль идеального газа участвует в процессе, представленном на (р,Т) диаграмме. Работа газа при его переходе из состояния А в состояние В равна
Работа газа при его переходе из состояния А в состояние В равна
1) 0 Дж 2) 300 Дж 3) 450 Дж 4) 600 Дж 5) 900 Дж
А15. Какое количество теплоты необходимо сообщить одному молю идеального газа при постоянном давлении, чтобы увеличить его объем в два раза? Начальная температура газа t = 0°С,
1) 2,3 кДж 2) 3,4 кДж 3) 4,6 кДж 4) 5,7 кДж 5) 6,9 кДж
А16. В идеальной тепловой машине абсолютная температура нагревателя больше абсолютной температуры холодильника в два раза. Количество теплоты, полученное от нагревателя, составляет 800 Дж. Работа, совершенная машиной, равна
1) 100 Дж 2)200Дж 3)400Дж 4) 600 Дж 5) 800 Дж
А17. Сила тока в проводнике изменяется по закону I = kt, где k = 10 А/с. Заряд, прошедший через поперечное сечение проводника за время t = 5 с от момента включения тока, равен
1) 25 Кл 2) 50 Кл 3) 75 Кл 4) 125 Кл 5) 250 Кл
А18.Два одинаковых металлических шарика имеют заряды q1 = Q и q2 = (-3)Q. Шарики привели в соприкосновение и развели на прежнее расстояние, в результате чего сила взаимодействия между ними
1) уменьшилась в 3 раза 2) уменьшилась в 2 раза 3) осталась прежней 4) увеличилась в 2 раза 5) увеличилась в 3 раза
А19. Два электрона движутся навстречу друг другу из бесконечности с начальными скоростями V1=V2= 105 м/с. Наименьшее расстояние, на которое сблизятся электроны, равно
1) 16 нм 2) 25 нм 3) 32 нм 4) 42 нм 5) 48 нм
А20. Плоский воздушный конденсатор имеет электроемкость С = 10 пФ и площадь пластин S = 1 см2 . Пробой воздуха в конденсаторе наступает при напряженности поля E = 3 106 В/м. Разность потенциалов, при которой наступит пробой конденсатора, равна
1) 266 В 2) 531 В 3) 2,6 кВ 4) 5,3 кВ 5) 27 кВ
А21. На схеме, изображенной на рисунке, показание амперметра равно
1) 0,5 А 2) 0,75 А 3)1,0 А 4) 1,5 А 5) 2,0 А
A22. Электроплитка имеет три секции с одинаковыми сопротивлениями.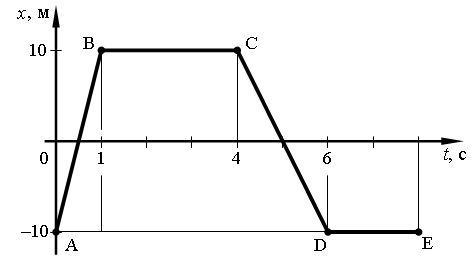 При параллельном соединении всех секций вода закипает через 12 минут. При последовательном соединении всех секций вода той же массы и той же начальной температуры закипит через интервал времени, равный
При параллельном соединении всех секций вода закипает через 12 минут. При последовательном соединении всех секций вода той же массы и той же начальной температуры закипит через интервал времени, равный
1) 24 мин 2) 54 мин 3) 72 мин 4) 108 мин 5) 216 мин
А23. По двум длинным параллельным проводам А и В в противоположных направлениях текут токи. Каждый из проводников на расстоянии 15 см от себя создает магнитное поле с индукцией В = 2,67 10-5 Тл. Расстояние между проводами l = 15 см. Модуль вектора индукции
магнитного поля в точке С, равноудаленной от проводов на расстоянии 15 см, равна
1) 1,34 10-5 Тл 2) 2,67 10-5 Тл 3) 3,32 10-5 Тл 4) 4,6210-5 Тл 5) 5,34 10-5 Тл
А24. Кинетическая энергия протона, движущегося по окружности в однородном магнитном поле с индукцией В = 1,5 Тл, равна 17,2 10-13 Дж. Радиус окружности равен
1) 5,5 см 2) 10,1 см 3) 20,0 см 4) 22,5 см 5) 31,6 см
А25. Проводник в форме плоского равностороннего треугольника, сторона которого а = 40 см, находится в однородном магнитном поле с индукцией 5 = 0,15 Тл. Вектор В перпендикулярен плоскости треугольника. При выключении поля в течение t = 0,01 с, в проводнике возбуждается ЭДС индукции, среднее значение которой равно
1)1 В 2) 1,5 В 3)1,75 В 4) 2 В 5) 2,25 В
А26. При фазе (рад) смещение материальной точки, колеблющейся
по косинусоидальному закону, составляет 0,01 м. Амплитуда колебания точки равна
1) 0,05 м 2) 0,04 м 3) 0,03 м 4) 0,02 м 5) 0,01 м
А27. Спиральная пружина, под действием подвешенного к ней груза, растянулась на l = 6,5 см. Если груз оттянуть вниз, а затем отпустить, то груз начнет колебаться вдоль вертикальной линии. Период колебания груза T равен
1) 50 с 2) 20 с 3) 5 с 4) 2 с 5) 0,5 с
А28. Волна распространяется вдоль резинового шнура со скоростью V = 4 м/с при частоте v= 5 Гц. Минимальное расстояние между точками шнура, которые одновременно проходят через положение равновесия, двигаясь при этом в одном направлении, равно
1) 0,4м 2) 0,8м 3) 1,25м 4) 4 м 5) 20 м
А29. Колебательный контур состоит из катушки индуктивности L = 59 мкГн и конденсатора емкостью С = 40 пФ. Энергия, запасенная в контуре W = 3,2 10-6 Дж. В тот момент, когда ток в цепи контура равен 160 мА, заряд на конденсаторе равен
Колебательный контур состоит из катушки индуктивности L = 59 мкГн и конденсатора емкостью С = 40 пФ. Энергия, запасенная в контуре W = 3,2 10-6 Дж. В тот момент, когда ток в цепи контура равен 160 мА, заряд на конденсаторе равен
1) 11 нКл 2) 14 нКл 3) 16 нКл 4) 18 нКл 5) 21 нКл
А20. Скорость распространения света в стекле равна 1,6 108 м/с. Абсолютный показатель преломления стекла равен
1) 1,5 2) 1,6 3) 1,7 4) 1,8 5) 1,9
А31. Предмет находится на расстоянии а = 0,1 м от тонкой рассеивающей линзы с фокусным расстоянием, равным 0,3 м. Линейное увеличение линзы равно
1) 0,25 2) 0,5 3) 0,75 4) 1,5 5) 3,0
А32. При какой скорости кинетическая энергия элементарной частицы равна ее энергии покоя?
1) 2,9 108 м/с 2) 2,8 108 м/с 3) 2,7 108 м/с 4)2,6 108 м/c 5)2,5 108м/с
А33. Красная граница фотоэффекта для лития равна vkp = 5,75 1014 Гц. Катод из лития освещается ультрафиолетом, длина волны которого = 200 нм. При этом задерживающее напряжение U3 равно
1) 2 В 2) 4 В 3) 6 В 4) 8 В 5) 10 В
А34. Частота излучения, которое вызывает ионизацию атома водорода, находящегося в основном состоянии, равна 3,3 1015 Гц. Энергия электрона, находящегося в атоме водорода до ионизации, по абсолютной
величине равна
1) 1,7-10-14 Дж 2) 3,8 10-15 Дж 3) 4,6 10-16 Дж 4) 7,1 10-17 Дж
5) 2,2 10-18 Дж
А35. При радиоактивном распаде из ядра урана испускается -частица (ядро атома гелия ). В процессе распада ядро атома урана превратилось в ядро химического элемента
В1. Два шарика, массы которых m1 = 200 г и m2 = 300 г, подвешены на одинаковых нитях длиной L = 50 см. Шарики соприкасаются. Первый шарик отклонили от положения равновесия на угол = 90 и отпустили. После абсолютно неупругого соударения шарики поднимутся на высоту, равную . .. см.
.. см.
В2. Свинцовый шар массой m = 100 г падает с некоторой высоты и ударяется об пол. Скорость шара перед ударом 300 м/с. Все количество теплоты, выделившееся при ударе, поглощается шаром. Температура шара перед ударом 27°С. Температура плавления свинца 327°С. Удельная теплоемкость свинца 130 Дж/(кгК), удельная теплота плавления свинца 25 кДж/кг. Масса расплавившегося свинца равна … г.
B3 В электрическую цепь, показанную на рисунке, включена лампочка. Сила тока, проходящего через лампочку, равна I = 0,5 А. ЭДС источника = 100 В, внутреннее сопротивление г = 1 Ом, внешнее сопротивление R = 39 Ом. Мощность лампочки равна … Вт.
В4. При силе тока I=5 А магнитный поток через поперечное сечение соленоида равен 0,05 Вб. Индуктивность соленоида L = … мГн.
В5. Для определения длины волны света использовали дифракционную решетку с периодом d = 0,01 мм и экран, расположенный на расстоянии l = 2 м от решетки. Расстояние между центральным светлым пятном и соседним с ним оказалось равным 10 см. Длина волны равна =… нм.
Равнодействующая сила, обозначение сил, нахождение проекций на оси
Тестирование онлайн
Определение
Это векторная сумма всех сил, действующих на тело.
Велосипедист наклоняется в сторону поворота. Сила тяжести и сила реакции опоры со стороны земли дают равнодействующую силу, сообщающую центростремительное ускорение, необходимое для движения по окружности
Взаимосвязь со вторым законом Ньютона
Вспомним закон Ньютона:
Равнодействующая сила может быть равна нулю в том случае, когда одна сила компенсируется другой, такой же силой, но противоположной по направлению. В этом случае тело находится в покое или движется равномерно.
Сила Архимеда уравновешивается силой тяжести, тело равномерно перемещается в жидкости вниз. |
Сила тяжести уравновешивается силой упругости. |
 Книга покоится
Книга покоитсяЕсли равнодействующая сила НЕ равна нулю, то тело движется равноускоренно. Собственно именно эта сила является причиной неравномерного движения. Направление равнодействующей силы всегда совпадает по направлению с вектором ускорения.
Когда требуется изобразить силы, действующие на тело, при этом тело движется равноускоренно, значит в направлении ускорения действующая сила длиннее противоположной. Если тело движется равномерно или покоится длина векторов сил одинаковая.
Сила реакции опоры (сила, направленная вверх) длиннее силы тяжести, так как шарик движется по окружности, центростремительное ускорение направлено вверх | Сила реакции опоры (сила, направленная вверх) короче силы тяжести, так как шарик движется по окружности, центростремительное ускорение направлено вниз. Вектор силы тяжести, направленный вниз, длиннее. |
Нахождение равнодействующей силы
Для того, чтобы найти равнодействующую силу, необходимо: во-первых, верно обозначить все силы, действующие на тело; затем изобразить координатные оси, выбрать их направления; на третьем шаге необходимо определить проекции векторов на оси; записать уравнения. Кратко: 1) обозначить силы; 2) выбрать оси, их направления; 3) найти проекции сил на оси; 4) записать уравнения.
Как записать уравнения? Если в некотором направлении тело двигается равномерно или покоится, то алгебраическая сумма (с учетом знаков) проекций сил равна нулю. Если в некотором направлении тело движется равноускоренно, то алгебраическая сумма проекций сил равна произведению массы на ускорение, согласно второму закону Ньютона.
Примеры
На движущееся равномерно по горизонтальной поверхности тело, действуют сила тяжести, сила реакции опоры, сила трения и сила, под действием которой тело движется.
Обозначим силы, выберем координатные оси
Найдем проекции
Записываем уравнения
Тело, которое прижимают к вертикальной стенке, равноускоренно движется вниз.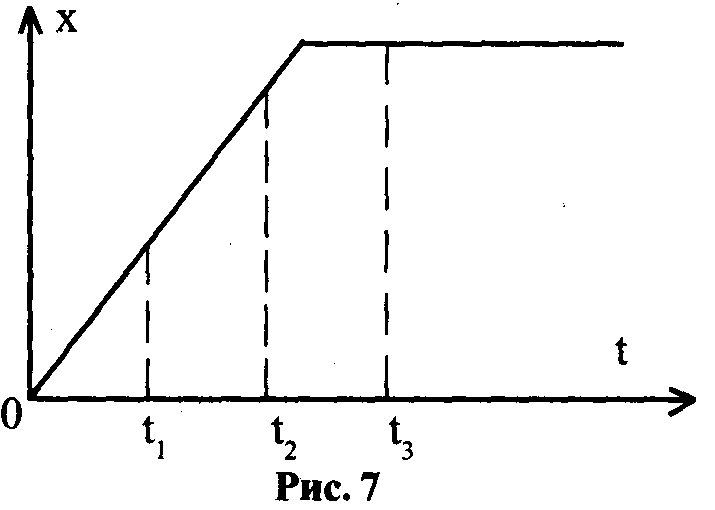 На тело действуют сила тяжести, сила трения, реакция опоры и сила, с которой прижимают тело. Вектор ускорения направлен вертикально вниз. Равнодействующая сила направлена вертикально вниз.
На тело действуют сила тяжести, сила трения, реакция опоры и сила, с которой прижимают тело. Вектор ускорения направлен вертикально вниз. Равнодействующая сила направлена вертикально вниз.
Тело равноускоренно движется по клину, наклон которого альфа. На тело действуют сила тяжести, сила реакции опоры, сила трения.
Главное запомнить
1) Если тело покоится или движется равномерно, то равнодействующая сила равна нулю и ускорение равно нулю;
2) Если тело движется равноускоренно, значит равнодействующая сила не нулевая;
3) Направление вектора равнодействующей силы всегда совпадает с направлением ускорения;
4) Уметь записывать уравнения проекций действующих на тело сил
Блок — механическое устройство, колесо, вращающееся вокруг своей оси. Блоки могут быть подвижными и неподвижными.
Неподвижный блок используется лишь для изменения направления силы.
Тела, связанные нерастяжимой нитью, имеют одинаковые по величине ускорения.
Подвижный блок предназначен для изменения величины прилагаемых усилий. Если концы веревки, обхватывающей блок, составляют с горизонтом равные между собой углы, то для подъёма груза потребуется сила вдвое меньше, чем вес груза. Действующая на груз сила относится к его весу, как радиус блока к хорде дуги, обхваченной канатом.
Ускорение тела А в два раза меньше ускорения тела В.
Фактически, любой блок представляет собой рычаг, в случае неподвижного блока — равноплечий, в случае подвижного — с соотношением плеч 1 к 2. Как и для всякого другого рычага, для блока справедливо правило: во сколько раз выигрываем в усилии, во столько же раз проигрываем в расстоянии
Также используется система, состоящая из комбинации нескольких подвижных и неподвижных блоков. Такая система называется полиспаст.
Равномерное движение
Простейшим видом механического движения является движение тела вдоль прямой линии с постоянной по модулю и направлению скоростью. Такое движение называется равномерным. При равномерном движении тело за любые равные промежутки времени проходит равные пути. Для кинематического описания равномерного прямолинейного движения координатную ось OX удобно расположить по линии движения. Положение тела при равномерном движении определяется заданием одной координаты x. Вектор перемещения и вектор скорости всегда направлены параллельно координатной оси OX.
Такое движение называется равномерным. При равномерном движении тело за любые равные промежутки времени проходит равные пути. Для кинематического описания равномерного прямолинейного движения координатную ось OX удобно расположить по линии движения. Положение тела при равномерном движении определяется заданием одной координаты x. Вектор перемещения и вектор скорости всегда направлены параллельно координатной оси OX.
Поэтому перемещение и скорость при прямолинейном движении можно спроектировать на ось OX и рассматривать их проекции как алгебраические величины.
Если в некоторый момент времени t1 тело находилось в точке с координатой x1, а в более поздний момент t2 – в точке с координатой x2, то проекция перемещения Δs на ось OX за время Δt = t2 – t1 равна
Эта величина может быть и положительной и отрицательной в зависимости от направления, в котором двигалось тело. При равномерном движении вдоль прямой модуль перемещения совпадает с пройденным путем. Скоростью равномерного прямолинейного движения называют отношение
Если υ > 0, то тело движется в сторону положительного направления оси OX; при υ < 0 тело движется в противоположном направлении.
Зависимость координаты x от времени t (закон движения) выражается при равномерном прямолинейном движении линейным математическим уравнением:
В этом уравнении υ = const – скорость движения тела, x0 – координата точки, в которой тело находилось в момент времени t = 0. График закона движения x(t) представляет собой прямую линию. Примеры таких графиков показаны на рис. 1.3.1.
Рисунок 1. Графики равномерного прямолинейного движения |
 3.1.
3.1.Для закона движения, изображенного на графике I (рис. 1.3.1), при t = 0 тело находилось в точке с координатой x0 = –3. Между моментами времени t1 = 4 с и t2 = 6 с тело переместилось от точки x1 = 3 м до точки x2 = 6 м. Таким образом, за Δt = t2 – t1 = 2 с тело переместилось на Δs = x2 – x1 = 3 м. Следовательно, скорость тела составляет
Величина скорости оказалась положительной. Это означает, что тело двигалось в положительном направлении оси OX. Обратим внимание, что на графике движения скорость тела может быть геометрически определена как отношение сторон BC и AC треугольника ABC (см. рис. 1.3.1)
Чем больше угол α, который образует прямая с осью времени, т. е. чем больше наклон графика (крутизна), тем больше скорость тела. Иногда говорят, что скорость тела равна тангенсу угла α наклона прямой x (t). С точки зрения математики это утверждение не вполне корректно, так как стороны BC и AC треугольника ABC имеют разные размерности: сторона BC измеряется в метрах, а сторона AC – в секундах.
Аналогичным образом для движения, изображенного на рис. 1.3.1 прямой II, найдем x0 = 4 м, υ = –1 м/с.
На рис. 1.3.2 закон движения x (t) тела изображен с помощью отрезков прямых линий. В математике такие графики называются кусочно-линейными. Такое движение тела вдоль прямой не является равномерным. На разных участках этого графика тело движется с различными скоростями, которые также можно определить по наклону соответствующего отрезка к оси времени. В точках излома графика тело мгновенно изменяет свою скорость. На графике (рис. 1.3.2) это происходит в моменты времени t1 = –3 с, t2 = 4 с, t3 = 7 с и t4 = 9 с. По графику движения нетрудно найти, что на интервале (t2; t1) тело двигалось со скоростью υ12 = 1 м/с, на интервале (t3; t2) – со скоростью υ23 = –4/3 м/с и на интервале (t4; t3) – со скоростью υ34 = 4 м/с.
В точках излома графика тело мгновенно изменяет свою скорость. На графике (рис. 1.3.2) это происходит в моменты времени t1 = –3 с, t2 = 4 с, t3 = 7 с и t4 = 9 с. По графику движения нетрудно найти, что на интервале (t2; t1) тело двигалось со скоростью υ12 = 1 м/с, на интервале (t3; t2) – со скоростью υ23 = –4/3 м/с и на интервале (t4; t3) – со скоростью υ34 = 4 м/с.
Следует отметить, что при кусочно-линейном законе прямолинейного движения тела пройденный путь l не совпадает с перемещением s. Например, для закона движения, изображенного на рис. 1.3.2, перемещение тела на интервале времени от 0 с до 7 с равно нулю (s = 0). За это время тело прошло путь l = 8 м.
Рисунок 1.3.2. Кусочно-линейный закон движения |
Тело, вынужденное двигаться по оси z координат класса 11 по физике CBSE
Подсказка: Попытайтесь вспомнить, как бы вы выразили проделанную работу как скалярное произведение двух вышеуказанных величин. Также помните, что единственными составляющими вектора являются ненулевые компоненты как по величине, так и по направлению. Другими словами, при вычислении скалярного произведения сосредоточьтесь только на компоненте силы, действующей в направлении z. Используемая формула:
Выполненная работа $ W = \ vec {F} \; . \ vec {S} $, где F — вектор силы, а S — вектор смещения.
Полный ответ:
Давайте сначала установим, что трехмерный вектор можно разбить на 3 компонента:
Компонент оси X $ \ hat {i} $,
Компонент оси Y $ \ hat { j} $ и
Компонент оси Z $ \ hat {k} $.
Каждый компонент вектора отображает величину влияния этого вектора в заданном направлении. $ \ Hat {i} $, $ \ hat {j} $ и $ \ hat {k} $ представляют единичные векторы в направлениях x, y и z соответственно, а число перед ними представляет величину вектор в этом направлении.
Теперь у нас есть тело, которое может двигаться только в направлении оси z. Это означает, что любое расстояние, которое мы пройдем, пройдя это тело, будет в направлении z ($ \ vec {k} $). Следовательно, расстояние, которое тело проходит под действием силы, можно представить вектором смещения $ \ vec {S} = 0 \ hat {i} +0 \ hat {j} +4 \ hat {k} $.
Работа, совершаемая силой $ \ vec {F} = -1 \ hat {i} +2 \ hat {j} +3 \ hat {k} $ для перемещения тела на расстояние $ \ vec {S} = 4 \ hat {k} $ задается как скалярное произведение двух, т.е.е.,:
$ W = \ vec {F}. \ vec {S} = \ left (-1 \ hat {i} +2 \ hat {j} +3 \ hat {k} \ right). \ left (4 \ hat {k} \ right) $
$ \ Rightarrow W = \ left (3 \ hat {k} \ right). \ left (4 \ hat {k} \ right) = 12 \; J $
Следовательно, только z-компонента силы способствует перемещению тела в z-направлении. Таким образом, работа, совершаемая силой при перемещении тела на расстояние $ 4 \; m $, равна $ 12 \; J $
Примечание:
Помните, что скалярное произведение двух векторов дает скалярную величину и, следовательно, это не направленный.{\ circ} = 0, \ Rightarrow W = 0 $.
Следовательно, проделанная работа количественно оценивается только в том случае, если векторы не перпендикулярны друг другу и векторы имеют ненулевые компоненты.
Глоссарий терминов по робототехнике | Определения и примеры робототехники
Термины, определения и примеры робототехники
Функция графического 3D-дисплея
Функция трехмерного графического отображения (далее именуемая функцией трехмерного отображения) заключается в том, что трехмерная модель робота отображается в окне подвесного программирования, и может быть подтверждено текущее значение робота. Используя многооконную функцию, позиция обучения задания, отображаемая в содержании задания, также может быть подтверждена в окне 3D-дисплея. Когда функция функциональной безопасности активна, также может отображаться диапазон функциональной безопасности.
Используя многооконную функцию, позиция обучения задания, отображаемая в содержании задания, также может быть подтверждена в окне 3D-дисплея. Когда функция функциональной безопасности активна, также может отображаться диапазон функциональной безопасности.
Абсолютные данные (данные ABSO)
Абсолютные данные (данные ABSO) — это поправочный коэффициент для данных, который устанавливает указанное нулевое значение, когда робот находится в заданном исходном положении (положение калибровки).
Точность
Точность — это измерение отклонения между командной характеристикой и достигнутой характеристикой (R15.05-2), или точность, с которой может быть достигнуто вычисленное или вычисленное положение робота. Точность обычно хуже, чем повторяемость руки. Точность не постоянна по всему рабочему пространству из-за влияния кинематики звена.
Активный совместимый робот
Активно совместимый робот — это робот, в котором изменение движения во время выполнения задачи инициируется системой управления. Модификация индуцированного движения незначительна, но достаточна для облегчения выполнения желаемой задачи.
Фактическая позиция
Положение или расположение точки управления инструментом. Обратите внимание, что это не будет точно таким же, как позиция запроса, из-за множества невыявленных ошибок, таких как отклонение линии связи, нерегулярность передачи, допуски в длине линии связи и т. Д.
Привод
Силовой механизм, используемый для обеспечения движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию в движение робота) (R15.07). Привод реагирует на сигнал, полученный от системы управления.
Плечо
Взаимосвязанный набор звеньев и механических соединений, включающий робот-манипулятор, который поддерживает и / или перемещает запястье и руку или конечный эффектор в пространстве. Сама рука не имеет рабочего органа.
Сама рука не имеет рабочего органа.
См. Манипулятор, Рабочий орган и Запястье.
Шарнирно-сочлененный манипулятор
Манипулятор с рукой, которая разделена на секции (звенья) одним или несколькими суставами.Каждое из сочленений представляет собой степень свободы в системе манипулятора и допускает поступательное и вращательное движение.
Шарнирное соединение
Описывает сочлененное устройство, например сочлененный манипулятор. Шарниры обеспечивают вращение вокруг вертикальной оси и подъем из горизонтальной плоскости. Это позволяет роботу достигать ограниченного пространства.
Сборочный робот
Робот, специально разработанный для соединения, подгонки или иным способом сборки различных деталей или компонентов в готовые изделия.В основном используется для захвата деталей и соединения или подгонки их друг к другу, например, при производстве на сборочных линиях.
Функция автоматического измерения
Для оптимального движения робота необходимо указать массовые характеристики рабочего органа. Эти свойства могут быть получены из CAD-модели инструмента. Функция автоматического измерения является альтернативой модели САПР и использует саму руку робота для измерения свойств инструмента. С помощью этой функции пользователь может регистрировать нагрузку на инструмент, положение центра тяжести инструмента и момент инерции в центре тяжести.
Автоматический режим
См. Режим воспроизведения.
Ось
Направление, используемое для задания движения робота в линейном или вращательном режиме. (ISO 8373)
Взаимодействие осей
Область пересечения осей — это функция, которая определяет текущее положение каждой оси и выводит сигнал в зависимости от того, находится ли текущее положение в пределах предварительно определенного диапазона.
База
Устойчивая платформа, к которой крепится промышленный робот-манипулятор.
Базовая система координат
Базовая система координат (иногда называемая мировой системой координат) определяет общую точку отсчета для ячейки или приложения. Это полезно при использовании нескольких роботов или устройств, поскольку позиции, определенные в базовых координатах, будут одинаковыми для всех роботов и устройств. (см. рисунок справа)
Базовая ссылка
Стационарная базовая конструкция манипулятора, поддерживающая первый сустав.
Приработка
Burn-In — это процедура тестирования робота, при которой все компоненты робота работают непрерывно в течение длительного периода времени.Это делается для проверки движения и программирования движения робота на ранних этапах, чтобы избежать сбоев в работе после развертывания.
Компьютерное проектирование (CAD)
Компьютерное проектирование (САПР). Приложения компьютерной графики, предназначенные для проектирования объектов (или частей), которые должны быть изготовлены. Компьютер используется в качестве инструмента для разработки схем и создания чертежей, которые позволяют точно производить объект. Система CAD позволяет создавать трехмерные чертежи основных фигур, точно определять размеры и размещение компонентов, создавать линии заданной длины, ширины или угла, а также удовлетворять различные геометрические формы.Эта система также позволяет проектировщику испытывать моделируемую деталь при различных напряжениях, нагрузках и т. Д.
Карусель
Вращающаяся платформа, которая доставляет объекты роботу и служит системой очереди объектов. Эта карусель доставляет объекты или детали на станцию загрузки / выгрузки робота.
Декартовы координаты
Декартовы координаты — это тип системы координат, которая определяет положение точки в двухмерном пространстве с помощью пары числовых чисел, которые дополнительно определяют расстояние до фиксированных осей, перпендикулярных друг другу.Проще говоря, график XY представляет собой двумерную декартову систему координат. Когда точка задана в трехмерном пространстве (график XYZ), она составляет трехмерную декартову систему координат. Положение TCP робота указывается в декартовой системе координат.
Декартов манипулятор
Декартов манипулятор — это манипулятор с призматическими шарнирами, который позволяет перемещаться по одной или нескольким из трех осей в системе координат X, Y, Z.
Декартова топология
Топология, в которой используются призматические стыки, обычно расположенные перпендикулярно друг другу.
Робот в декартовых координатах
Робот с декартовыми координатами — это робот, чьи степени свободы манипулятора определяются декартовыми координатами. Это описывает движения восток-запад, север-юг и вверх-вниз, а также вращательные движения для изменения ориентации.
Категория 3 (Cat3)
Категория 3 (категория 3) означает, что части системы управления, связанные с безопасностью, будут спроектированы таким образом, чтобы:
Единичные неисправности не препятствуют правильной работе функции безопасности.
Одиночные неисправности будут обнаружены при следующем запросе функции безопасности или до него.
Когда происходит единичный отказ, безопасное состояние должно поддерживаться до тех пор, пока обнаруженный отказ не будет исправлен.
Обнаружены все разумно предсказуемые неисправности.
Центробежная сила
Когда тело вращается вокруг оси, отличной от той, которая находится в центре его масс, оно оказывает внешнюю радиальную силу, называемую центробежной силой, на ось, которая удерживает его от движения по прямой касательной линии.Чтобы компенсировать эту силу, робот должен приложить противоположный крутящий момент в суставе вращения.
Тип кругового перемещения
Расчетный путь, который выполняет робот, имеет круглую форму.
Зажим
Конечный эффектор, который служит пневматической рукой, которая контролирует захват и отпускание объекта. Тактильные датчики и датчики силы обратной связи используются для управления силой, приложенной зажимом к объекту. См. «Концевой эффектор».
Зажим
Максимально допустимая сила, действующая на область тела в результате столкновения робота, когда период контакта приводит к пластической деформации мягких тканей человека.
Сила зажима
При контакте может быть зажат части тела (частей).
Замкнутый
Управление осуществляется роботом-манипулятором посредством обратной связи. Когда манипулятор находится в действии, его датчики постоянно передают информацию контроллеру робота, который используется для дальнейшего направления манипулятора в рамках данной задачи. Многие датчики используются для передачи информации о размещении манипулятора, скорости, крутящем моменте, приложенных силах, а также о размещении целевого движущегося объекта и т. Д.См. Обратную связь.
Коллаборативный робот
Термин, используемый для описания роботизированной системы, предназначенной для работы в одном или нескольких из четырех совместных режимов.
Командный интерпретатор
Модуль или набор модулей, определяющий значение полученной команды. Команда разбивается на части (разбирается) и обрабатывается.
Командная позиция
Конечная точка движения робота, которую пытается достичь контроллер.
Соответствие
Смещение манипулятора в ответ на силу или крутящий момент. Высокая податливость означает, что манипулятор немного перемещается при нагрузке. Это называется пористым или упругим. При стрессе низкая комплаенс будет жесткой системой.
Соответствующий робот
Робот, который выполняет задачи по отношению к внешним силам, изменяя свои движения таким образом, чтобы эти силы сводились к минимуму. Указанное или разрешенное движение достигается за счет поперечной (горизонтальной), осевой (вертикальной) или вращательной податливости.
Конфигурация
Расположение ссылок, созданное определенным набором совместных позиций на роботе. Обратите внимание, что может быть несколько конфигураций, приводящих к одному и тому же положению конечной точки.
Контактный датчик
Устройство, которое обнаруживает присутствие объекта или измеряет величину приложенной силы или крутящего момента, приложенного к объекту при физическом контакте с ним. Контактное зондирование можно использовать для определения местоположения, идентичности и ориентации деталей.
Непрерывный путь
Описывает процесс, в котором робот контролирует весь пройденный путь, в отличие от метода обхода от точки к точке. Это используется, когда траектория рабочего органа наиболее важна для обеспечения плавного движения, например, при окраске распылением и т. Д. См. «От точки к точке».
Алгоритм управления
Монитор, используемый для обнаружения отклонений траектории, в котором датчики обнаруживают такие отклонения, и приложения крутящего момента вычисляются для приводов.
Команда управления
Команда, передаваемая роботу с помощью устройства ввода от человека к машине. См. Кулон (Обучение). Эта команда принимается системой контроллера робота и интерпретируется. Затем соответствующая команда подается на исполнительные механизмы робота, которые позволяют ему реагировать на начальную команду. Часто команда должна интерпретироваться с использованием логических единиц и определенных алгоритмов. См. «Устройство ввода и цикл команд».
Устройство управления
Любая часть управляющего оборудования, обеспечивающая средства для вмешательства человека в управление роботом или роботизированной системой, например кнопка аварийного останова, кнопка запуска или селекторный переключатель.(R15.06)
Режим управления
Средства, с помощью которых инструкции передаются роботу.
Управляемость
Свойство системы, с помощью которого входной сигнал может переводить систему из начального состояния в желаемое состояние по предсказуемому пути в течение заранее определенного периода времени.
Контроллер
Устройство обработки информации, входными данными которого являются как желаемое, так и измеренное положение, скорость или другие соответствующие переменные в процессе, а выходными данными являются управляющие сигналы для управляющего двигателя или исполнительного механизма.(R15.02)
Система управления
Механизм управления роботом обычно представляет собой компьютер определенного типа, который используется для хранения данных (как робота, так и рабочей среды), а также хранения и выполнения программ, управляющих роботом. Система Контроллера содержит программы, данные, алгоритмы; логический анализ и различные другие операции обработки, которые позволяют ему выполнять. См. Робот.
Система координат или рама
Система координат (или рамка) определяет исходное положение и ориентацию, с которой можно измерить положение робота.Все положения робота определены со ссылкой на систему координат. Роботы Yaskawa используют следующие системы координат:
Центральный процессор (ЦП)
Центральный процессор (ЦП) — это основная печатная плата и процессор системы контроллера.
Кубическая зона помех
Эта область представляет собой прямоугольный параллелепипед, который параллелен базовой координате, координате робота или координате пользователя. Контроллер YRC1000 определяет, находится ли текущее положение TCP манипулятора внутри или вне этой области, и выводит это состояние в качестве сигнала.
Цикл
Однократное выполнение полного набора движений и функций, содержащихся в программе робота. (R15.05-2)
Циклическая система координат
Система координат, которая определяет положение любой точки с точки зрения углового размера, радиального размера и высоты от базовой плоскости. Эти три измерения определяют точку на цилиндре.
Цикл Привод
Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используемое на большой (большей) оси.
Цилиндрическая топология
Топология, в которой плечо следует радиусом горизонтального круга с призматическим шарниром для подъема или опускания круга. Не популярен в промышленности.
Выключатель аварийного отключения
Устаревший срок. См. Включение устройства.
Степени свободы
Количество независимых направлений или суставов робота (R15.07), которые позволили бы роботу перемещать свой конечный эффектор через требуемую последовательность движений.Для произвольного позиционирования необходимо 6 степеней свободы: 3 для положения (влево-вправо, вперед-назад и вверх-вниз) и 3 для ориентации (рыскание, тангаж и крен).
Прямой привод
Совместное срабатывание, в том числе без элементов трансмиссии (т. Е. Тяга привинчена к выходу двигателя).
Простои
Период времени, в течение которого робот или производственная линия останавливаются из-за неисправности или отказа. См. Время безотказной работы.
Привод
Редуктор скорости (зубчатый) для преобразования низкого крутящего момента на высокой скорости в высокий крутящий момент на низкой скорости.См. Разделы Harmonic Drive, Cyclo Drive и Rotary Vector Drive).
Прямая доставка
Метод подвода предмета к рабочему месту под действием силы тяжести. Обычно желоб или контейнер размещают таким образом, чтобы по окончании работы над деталью она упала или упала в желоб или на конвейер с небольшой транспортировкой робота или вообще без нее.
Динамика
Изучение движения, сил, вызывающих движение, и сил, обусловленных движением. Динамика манипулятора робота очень сложна, поскольку является результатом кинематического поведения всех масс внутри конструкции руки.Кинематика манипулятора робота сложна сама по себе.
Аварийный останов
Работа схемы с использованием аппаратных компонентов, которая перекрывает все другие органы управления роботом, снимает мощность привода с исполнительных механизмов робота и вызывает остановку всех движущихся частей. (R15.06)
Переключатель включения
См. Включение устройства.
Разрешающее устройство
Устройство с ручным управлением, которое при постоянном включении разрешает движение.Освобождение устройства должно остановить движение робота и связанное с ним оборудование, которое может представлять опасность. (R15.06)
Энкодер
Устройство обратной связи в руке робота-манипулятора, которое предоставляет контроллеру данные о текущем положении (и ориентации руки). Луч света проходит через вращающийся кодовый диск, который содержит точный узор из непрозрачных и прозрачных сегментов на своей поверхности. Свет, который проходит через диск, попадает в фотодетекторы, которые преобразуют световой рисунок в электрические сигналы.См. Раздел «Обратная связь, управление с обратной связью» и «Датчик обратной связи».
EOAT
См. Захват или Концевой эффектор.
Рабочий орган
Вспомогательное устройство или инструмент, специально предназначенные для крепления к запястью робота или монтажной пластине для инструмента, чтобы робот мог выполнять свою задачу. (Примеры могут включать: захват, пистолет для точечной сварки, пистолет для дуговой сварки, распылительный пистолет или любые другие инструменты.) (R15.06)
Конечная точка
Номинальное управляемое положение, которого манипулятор будет пытаться достичь в конце пути движения.Конец дистального звена.
Ошибка
Разница между фактическим ответом робота и отданной командой.
Возможность расширения
Возможность добавлять в систему ресурсы, такие как память, жесткий диск большего размера, новая карта ввода-вывода и т. Д.
Предел внешнего усилия
Пороговое значение, при котором робот перемещается или сохраняет свое положение, даже при приложении внешних сил (при условии, что силы не превышают пределов, которые могут вызвать ошибку).
Обратная связь
Возврат информации от манипулятора или датчика к процессору робота для обеспечения самокорректирующегося управления манипулятором.
См. Раздел «Управление обратной связью» и «Датчик обратной связи».
Управление обратной связью
Тип управления системой, получаемый, когда информация от манипулятора или датчика возвращается контроллеру робота для получения желаемого эффекта робота. См. Раздел «Обратная связь, управление с обратной связью» и «Датчик обратной связи».
Датчик обратной связи
Механизм, через который информация от сенсорных устройств возвращается в блок управления роботом. Информация используется в последующем направлении движения робота. См. Управление с обратной связью и управление с обратной связью.
Гибкость
Способность робота выполнять самые разные задачи.
Силовая обратная связь
Метод обнаружения, использующий электрические сигналы для управления рабочим органом робота во время работы рабочего органа.Информация поступает от датчиков силы рабочего органа к блоку управления роботом во время выполнения конкретной задачи, чтобы обеспечить улучшенную работу рабочего органа.
См. Раздел «Обратная связь», «Датчик обратной связи» и «Датчик силы».
Датчик силы
Датчик, способный измерять силы и крутящий момент, прилагаемые роботом и его запястьем. Такие датчики обычно содержат тензодатчики. Датчик предоставляет информацию, необходимую для обратной связи по силе. См. Force Feedback
Решение для прямой кинематики
Расчет, необходимый для определения положения конечной точки с учетом положений суставов.Для большинства топологий роботов это проще, чем найти решение с обратной кинематикой.
Передняя кинематика
Вычислительные процедуры, определяющие, где находится рабочий орган робота в пространстве. В процедурах используются математические алгоритмы вместе с совместными датчиками для определения его местоположения.
Рама
Система координат, используемая для определения положения и ориентации объекта в пространстве, а также положения робота в его модели.
Блок функциональной безопасности (FSU)
Блок функциональной безопасности (FSU) — это компонент контроллера робота Yaskawa, который обеспечивает программируемые функции безопасности, которые обеспечивают совместную работу робота. Поскольку эти функции безопасности являются программируемыми, FSU позволяет минимизировать площадь, занимаемую расположенным поблизости оборудованием, а также зоны, доступные для человека. FSU состоит из двух параллельных центральных процессоров (ЦП), работающих одновременно, что обеспечивает двухканальную проверку.Кроме того, FSU получает позицию робота от своих энкодеров независимо от системы управления движением робота. Основываясь на этой обратной связи, FSU контролирует положение, скорость и положение манипулятора и инструмента.
Портал
Регулируемый подъемный механизм, который перемещается по фиксированной платформе или гусенице, поднятому или на уровне земли по осям X, Y, Z.
Портальный робот
Робот с тремя степенями свободы по системе координат X, Y и Z.Обычно состоит из намоточной системы (используемой как кран), которая при намотке или размотке обеспечивает движение вверх и вниз по оси Z. Катушка может скользить слева направо по валу, который обеспечивает движение по оси Z. Катушка и вал могут двигаться вперед и назад по направляющим, которые обеспечивают движение по оси Y. Обычно используется, чтобы расположить концевой эффектор над желаемым объектом и поднять его.
Гравитационная загрузка
Сила, прилагаемая вниз, из-за веса руки робота и / или нагрузки на конце руки.Сила создает ошибку в отношении точности положения концевого эффектора. Компенсирующая сила может быть вычислена и применена, чтобы вернуть руку в желаемое положение.
Захват
Концевой эффектор, предназначенный для захвата и удержания (ISO 8373) и «захватывания» или захвата объекта. Он прикреплен к последнему звену руки. Он может удерживать объект, используя несколько различных методов, таких как: приложение давления между своими «пальцами», или может использовать намагничивание или вакуум для удержания объекта и т. Д.См. «Концевой эффектор».
Рука
Зажим или захват, используемый в качестве рабочего органа для захвата предметов. См. Рабочий орган, Захват.
Ручное управление
Совместная функция, позволяющая оператору вручную направлять робота в желаемое положение. Эта задача может быть решена за счет использования дополнительного внешнего оборудования, установленного непосредственно на роботе, или робота, специально разработанного для поддержки этой функции. Оба решения потребуют использования элементов функциональной безопасности.Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Привод гармоник
Компактный легкий редуктор, который преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости. Обычно находится на малой (меньшей) оси.
Ремень
Обычно несколько проводов, связанных вместе для подачи питания и / или передачи сигналов к / от устройств. Например, двигатели робота подключены к контроллеру через жгут проводов.
Опасное движение
Непреднамеренное / неожиданное движение робота, которое может привести к травме.
Удерживать
Остановка всех движений робота во время его последовательности, при которой на роботе сохраняется некоторая мощность. Например, выполнение программы останавливается, однако питание серводвигателей остается включенным, если требуется перезапуск.
Исходное положение
Известное и фиксированное положение на основной оси координат манипулятора, где он останавливается, или в указанном нулевом положении для каждой оси.Это положение уникально для каждой модели манипулятора. На роботах Motoman® есть индикаторные метки, которые показывают исходное положение для соответствующей оси.
МЭК
Международная электротехническая комиссия
Индуктивный датчик
Класс датчиков приближения, который имеет половину ферритового сердечника, катушка которого является частью цепи генератора. Когда металлический объект входит в это поле, в какой-то момент объект поглощает достаточно энергии из поля, чтобы заставить осциллятор перестать колебаться.Это означает, что объект присутствует в определенной близости. См. Датчик приближения.
Промышленный робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материалов, деталей, инструментов или специализированных устройств посредством переменных запрограммированных движений для выполнения множества задач (R15.06). Основные компоненты: одна или несколько рук, которые могут двигаться в нескольких направлениях, манипулятор и компьютерный контроллер, который дает подробные инструкции по перемещению.
ИНФОРМАЦИЯ
Язык программирования роботов для роботов Yaskawa. Язык ИНФОРМ позволяет пользователю робота: инструктировать робота использовать его основные возможности для выполнения определенного набора ожиданий, а также описывать роботу посредством определения параметров и условий, какие ожидания возникают в определенных ситуациях или сценариях. Проще говоря, язык программирования INFORM позволяет пользователю указывать роботу, что делать, когда это делать, где это делать и как это делать.
Устройства ввода
Разнообразные устройства, позволяющие взаимодействовать между человеком и машиной. Это позволяет человеку программировать, управлять и моделировать робота. К таким устройствам относятся пульт для программирования, компьютерные клавиатуры, мышь, джойстики, кнопки, панель оператора, тумба оператора и т. Д.
Инструкция
Строка программного кода, вызывающая действие системного контроллера. См. Командное положение.
Цикл команд
Время, которое требуется циклу системы контроллера робота для декодирования команды или инструкции перед ее выполнением.Программисты-роботы должны очень внимательно анализировать цикл команд, чтобы обеспечить быструю и правильную реакцию на изменяющиеся команды.
Интегрировать
Чтобы объединить разные подсистемы, такие как роботы и другие устройства автоматизации, или, по крайней мере, разные версии подсистем в одной оболочке управления.
Интегратор
Компания, предоставляющая услуги с добавленной стоимостью, результатом которых является создание решений автоматизации путем объединения робота и другого оборудования автоматизации и управления для создания решения автоматизации для конечных пользователей.
Интеллектуальный робот
Робот, который можно запрограммировать на выбор производительности в зависимости от сенсорных входов с минимальной или нулевой помощью со стороны человека. См. Робот.
Зона помех
Зона помех — это функция, которая предотвращает помехи между несколькими манипуляторами или манипулятором и периферийным устройством. Области можно настроить до 64 областей. Три типа методов использования каждой области интерференции: кубическая интерференция, вне кубической области и осевая интерференция.
Интерполяция
Метод создания путей к конечным точкам. В общем, для задания движения несколько узловых точек определяются до того, как все промежуточные положения между ними вычисляются с помощью математической интерполяции. Таким образом, используемый алгоритм интерполяции существенно влияет на качество движения.
ISO
Международная организация по стандартизации
ISO 10218-1 Роботы и робототехнические устройства — Требования безопасности для промышленных роботов — Часть 1: Роботы
Специализированная спецификация безопасности робота, которая касается требований производителя, функциональности, требуемых характеристик безопасности, опасностей, мер защиты и документации для самого робота.
ISO 10218-2 Роботы и робототехнические устройства — Требования безопасности для промышленных роботов — Часть 2: Роботные системы и интеграция
Сопутствующий документ ISO 10218-1. Эта спецификация безопасности представляет собой руководство как для конечных пользователей, так и для интеграторов роботов в том, что касается безопасного проектирования, установки и ввода в эксплуатацию робототехнических систем, а также рекомендуемых процедур, мер безопасности и информации, необходимой для использования.
ISO TS 15066 (ANSI RIA 15.606): Роботы и роботизированные устройства — Коллаборативные роботы
Предоставляет подробные инструкции, отсутствующие в ISO 10218, части 1 или 2, по безопасному использованию промышленных роботов, работающих совместно.
Матрица Якоби
Матрица Якоби связывает скорости изменения совместных значений со скоростью изменения координат конечных точек. По сути, это набор алгоритмов вычислений, которые обрабатываются для управления позиционированием робота.
РАБОТА
JOB — это название Yaskawa программы для роботов, созданной с использованием языка программирования роботов INFORM компании Yaskawa. Обычно задание состоит из инструкций, которые сообщают контроллеру робота, что делать, и данных, которые программа использует во время работы.
Шарнир
Часть системы манипулятора, которая обеспечивает степень свободы вращения и / или поступательного перемещения звена рабочего органа.
Совместное интерполированное движение
Метод координации движения суставов, при котором все суставы достигают желаемого места одновременно. Этот метод сервоуправления обеспечивает предсказуемый путь независимо от скорости и обеспечивает самое быстрое время цикла захвата и размещения для конкретного движения.
Тип шарнира движения
Тип совместного движения, также известный как двухточечное движение, представляет собой метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение непосредственно в заданное положение, так что все оси достигают этого положения одновременно. Хотя путь предсказуем, он не будет линейным.
Совместное пространство
а. Совместное пространство (или Совместные координаты) — это просто метод определения положения робота с точки зрения значения каждой оси, а не положения TCP.Например, исходное положение робота часто определяется в Joint Space, поскольку каждая ось находится под углом 0 градусов.
б. Набор совместных позиций.
Соединения
Части манипулятора робота, которые действительно сгибаются или двигаются.
Кинематика
Связь между движением конечной точки робота и движением суставов. Для декартового робота это набор простых линейных функций (линейные дорожки, которые могут быть расположены в направлениях X, Y, Z), для вращающейся топологии (шарниры, которые вращаются), однако кинематика намного сложнее, включая сложные комбинации тригонометрии. функции.Кинематика руки обычно делится на прямое и обратное решения.
Захват ковша
Конечный эффектор, который действует как совок. Он обычно используется для сбора жидкости, переноса ее в форму и заливки жидкости в форму. Обычно используется для работы с расплавленным металлом в опасных условиях. См. «Концевой эффектор».
Лазер
Акроним от «Усиление света за счет вынужденного излучения». Устройство, которое производит когерентный монохроматический луч света, который является чрезвычайно узким и сфокусированным, но все же находится в пределах видимого светового спектра.Обычно он используется в качестве бесконтактного датчика для роботов. Роботизированные приложения включают в себя: определение расстояния, определение точного местоположения, картографирование поверхности, сканирование штрих-кода, резку, сварку и т. Д.
Линейное движение с интерполяцией
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение в скоординированном движении так, чтобы все оси приходили в позицию одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Линейный тип движения
Это метод интерполяции траектории, который управляет движением робота, перемещая каждое соединение в скоординированном движении так, чтобы все оси приходили в позицию одновременно. Путь контрольной точки инструмента (TCP) предсказуем и будет линейным.
Ссылка
Жесткая часть манипулятора, соединяющая соседние суставы.
Ссылки
Статический материал, который соединяет суставы руки вместе.Тем самым образуется кинематическая цепочка. В человеческом теле звеньями являются кости.
Время цикла нагрузки
Термин технологического процесса производственной или сборочной линии, который описывает полное время, необходимое для выгрузки последней заготовки и загрузки следующей.
Магнитные детекторы
Датчики роботов, которые могут определять присутствие ферромагнитного материала. Твердотельные детекторы с соответствующим усилением и обработкой могут обнаруживать металлический объект с высокой степенью точности.См. Датчик.
Манипулятор
Механизм машины или робота, который обычно состоит из серии сегментов (соединенных или скользящих друг относительно друга) с целью захвата и / или перемещения объектов (частей или инструментов), обычно с несколькими степенями свободы. Управление манипулятором может осуществляться оператором, программируемым электронным контроллером или любой логической системой (например, кулачковым устройством, проводным и т. Д.) (ISO 8373)
См. Руку, запястье и рабочий орган
Ручной режим
См. Режим обучения.
Погрузочно-разгрузочные работы
Процесс, с помощью которого промышленный робот-манипулятор переносит материалы из одного места в другое.
Робот для обработки материалов
Робот, спроектированный и запрограммированный таким образом, чтобы он мог обрабатывать, резать, формировать или изменять форму, функцию или свойства материалов, с которыми он работает, между моментом, когда материалы впервые схвачены, и временем их выпуска в производственном процессе.
Функция сдвига зеркала
С помощью функции зеркального сдвига задание преобразуется в задание, в котором траектория симметрична пути исходного задания.Это преобразование может быть выполнено для указанной координаты из координат X-Y, X-Z или Y-Z координат робота и координат пользователя. Функция зеркального смещения подразделяется на следующие три: функция импульсного зеркального смещения, функция зеркального смещения координат робота и функция зеркального смещения пользовательских координат. (см. рисунок справа)
Переключатель режима
В соответствии со стандартами безопасности промышленный робот имеет три различных режима работы. Это обучение (также называемое ручным), воспроизведение (также называемое автоматическим) и дистанционное управление.Переключение между этими режимами осуществляется с помощью переключателя с ключом на подвесном пульте обучения и называется переключателем режима.
Модульность
Свойство гибкости встроено в робота и систему управления путем сборки отдельных узлов, которые можно легко соединить или скомпоновать с другими частями или узлами.
Модуль
Автономный компонент пакета. Этот компонент может содержать подкомпоненты, известные как подмодули.
Ось движения
Линия, определяющая ось движения линейного или поворотного сегмента манипулятора.
Двигатель
См. Серводвигатель.
Отключение звука
При тестировании программы робота отключение любых устройств защиты от присутствия во время полного цикла робота или его части.
Автономное программирование
Метод программирования, при котором целевая программа определяется на устройствах или компьютерах отдельно от робота для последующего ввода программной информации роботу. (ISO 8373) б.Средство программирования робота во время его работы. Это становится важным при производстве и производстве сборочных линий из-за сохранения высокой производительности, пока робот программируется для других задач.
Оператор
Лицо, уполномоченное запускать, контролировать и останавливать запланированную продуктивную работу робота или роботизированной системы. Оператор также может взаимодействовать с роботом для производственных целей. (R15.06)
Оптический кодировщик
Датчик обнаружения, который измеряет линейное или вращательное движение, обнаруживая движение маркировки мимо фиксированного луча света.Его можно использовать для подсчета оборотов, идентификации деталей и т. Д.
Оптические датчики приближения
Датчики роботов, которые измеряют видимый или невидимый свет, отраженный от объекта, для определения расстояния. Лазеры используются для большей точности.
Ориентация
Угол, образованный большой осью объекта относительно базовой оси. Он должен быть определен относительно трехмерной системы координат. Угловое положение объекта относительно системы отсчета робота.См. Roll, Pitch и Yaw.
Паллетирование
Организованный процесс штабелирования пакетов (т. Е. Ящиков, пакетов, контейнеров и т. Д.) На поддоне.
Функция PAM — регулировка положения вручную
Регулировка положения вручную позволяет регулировать положение с помощью простых операций, наблюдая за движением манипулятора и не останавливая манипулятор. Позиции можно регулировать как в режиме обучения, так и в режиме воспроизведения.
Функция параллельного смещения
Параллельный сдвиг относится к смещению объекта из фиксированного положения таким образом, что все точки внутри объекта перемещаются на равное расстояние.В модели для параллельного сдвига, показанной ниже, значение сдвига может быть определено как расстояние L (трехмерное координатное смещение). Функция параллельного смещения имеет отношение к фактической работе манипулятора, поскольку ее можно использовать для уменьшения объема работы, связанной с обучением, путем смещения обученного пути (или положения). В примере, показанном на рисунке ниже, обученная позиция A смещается на расстояние L (на самом деле это трехмерное смещение XYZ, которое может распознать робот).
Путь
Непрерывное геометрическое место позиций (или точек в трехмерном пространстве), пересекаемое центральной точкой инструмента и описываемое в указанной системе координат. (R15.05-2)
Полезная нагрузка — максимальная
Максимальная масса, которой робот может манипулировать при указанной скорости, ускорении / замедлении, расположении (смещении) центра тяжести и воспроизводимости при непрерывной работе в указанном рабочем пространстве. Максимальная полезная нагрузка указана в килограммах.(R15.05-2)
Кулон [Обучающий кулон]
Переносное устройство ввода, связанное с системой управления, с помощью которой можно программировать или перемещать робота. (ISO 8373) Это позволяет человеку-оператору занять наиболее удобное положение для наблюдения, контроля и записи желаемых движений в памяти робота.
Кулон обучающий
Отображение и запись положения и ориентации системы робота и / или манипулятора по мере того, как робот вручную поэтапно перемещается от начального состояния по пути к конечному целевому состоянию.Положение и ориентация каждой критической точки (суставы, база робота и т. Д.) Записываются и сохраняются в базе данных для каждой обученной позиции, через которую проходит робот на пути к своей конечной цели. Теперь робот может повторить путь самостоятельно, следуя пути, сохраненному в базе данных.
Уровень эффективности d (PLd)
Уровень эффективности (PL) ISO «d» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-7 до <10-6.Кроме того, учитываются и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды. Это минимальный уровень эффективности, указанный в ISO 10218-2, раздел 5.2.2, если оценка риска не позволит использовать более низкое значение.
Уровень эффективности e (PLe)
Уровень эффективности ISO (PL) «e» означает, что средняя вероятность опасного отказа в час связанных с безопасностью частей системы управления находится в пределах от ≥ 10-8 до <10-7.Кроме того, учитываются и другие факторы, такие как правильная установка, техническое обслуживание и защита от факторов окружающей среды.
Цикл подбора и размещения
Время, необходимое манипулятору, чтобы поднять объект и поместить его в желаемое место, а затем вернуться в исходное положение. Это включает время во время фаз ускорения и замедления конкретной задачи. Движение робота контролируется из одной точки в пространстве в другую в системе движения «точка-точка» (PTP).Каждая точка запрограммирована в управляющую память робота, а затем воспроизводится во время рабочего цикла.
Задача по подбору и размещению
Повторяющаяся задача переноса детали, состоящая из действия подбора, за которым следует действие по размещению.
Точки защемления
Точка защемления — это любая точка, в которой человек или часть тела человека может оказаться зажатым между движущимися частями машины, или между движущейся и неподвижной частями машины, или между материалом и любой частью машины. .Точка защемления не обязательно должна приводить к травме конечности или части тела, хотя может привести к травме — она должна только защемить или ущипнуть человека, чтобы он не смог вырваться или вынуть защемленную часть из точки защемления.
Шаг
Вращение рабочего органа в вертикальной плоскости вокруг конца руки робота-манипулятора.
См. Roll and Yaw.
Режим воспроизведения
После того, как робот запрограммирован в режиме обучения, контроллер робота можно переключить в режим воспроизведения для выполнения программы робота.В режиме воспроизведения воспроизводится программа робота. Это режим, в котором роботы используются в производстве.
Воспроизведение
Воспроизведение — это операция, при которой воспроизводится обученное задание. Эта функция используется, чтобы решить, где возобновить воспроизведение при запуске операции после приостановки воспроизведения и перемещения курсора или выбора других заданий. 0: запускает операцию, когда курсор находится в задании, отображаемом в данный момент. 1: Появится окно продолжения воспроизведения.Выберите «ДА», и воспроизведение возобновится в том месте, где находился курсор, когда воспроизведение было приостановлено. Если выбрано «НЕТ», воспроизведение возобновляется с того места, где находится курсор в задании, отображаемом в данный момент. Режимы Включите пульт программирования: PLAY — задание запускается кнопкой [СТАРТ] на пульте программирования, а задание REMOTE запускается периферийным устройством (внешний пусковой вход).
Точка-точка
Движение манипулятора, в котором задано ограниченное количество точек на прогнозируемой траектории движения.Манипулятор перемещается от точки к точке, а не по непрерывной плавной траектории.
Поза
Альтернативный термин для конфигурации робота, который описывает линейное и угловое положение. Линейное положение включает азимут, высоту и дальность до объекта. Угловое положение включает в себя крен, тангаж и рыскание объекта. См. Roll, Pitch и Yaw.
Позиция
Определение местоположения объекта в трехмерном пространстве, обычно определяемое трехмерной системой координат с использованием координат X, Y и Z.
Уровень позиции
Уровень положения — это степень приближения манипулятора к обученному положению. Уровень положения может быть добавлен для перемещения команд MOVJ (совместная интерполяция) и MOVL (линейная интерполяция). Если уровень положения не установлен, точность зависит от скорости работы. Установка соответствующего уровня перемещает манипулятор по траектории, подходящей для окружающих условий и обрабатываемой детали. (см. рисунок справа)
Переменные положения
Переменные положения используются в программе робота (JOB) для определения местоположения в трехмерном пространстве, обычно определяемого трехмерной системой координат с использованием координат X, Y и Z.Поскольку это переменная, значение может меняться в зависимости от условий или информации, переданной в задание.
Ограничение мощности и усилия (PFL)
Совместная функция, которая позволяет оператору и роботу работать в непосредственной близости друг от друга, гарантируя, что робот замедлится и остановится до возникновения ситуации контакта. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка риска должна использоваться для определения того, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Устройство защиты от присутствия
Устройство, спроектированное, сконструированное и установленное для создания сенсорного поля для обнаружения вторжения в такое поле людьми, роботами или объектами. См. Датчик.
Программируемый логический контроллер (ПЛК)
Твердотельная система управления, которая имеет программируемую пользователем память для хранения инструкций для реализации определенных функций, таких как: логика управления вводом-выводом, синхронизация, счетная арифметика и обработка данных.ПЛК состоит из центрального процессора, интерфейса ввода / вывода, памяти и устройства программирования, в котором обычно используются эквивалентные символы реле. ПЛК специально разработан как промышленная система управления, которая может выполнять функции, эквивалентные релейной панели или проводной твердотельной логической системе управления, и может быть интегрирована в систему управления роботом.
Программируемый робот
Функция, позволяющая проинструктировать робота выполнить последовательность шагов, а затем выполнять эту последовательность повторяющимся образом.Затем при желании его можно перепрограммировать для выполнения другой последовательности шагов.
Датчик приближения
Бесконтактное сенсорное устройство, используемое для определения, когда объекты находятся на небольшом расстоянии, и оно может определять расстояние до объекта. Несколько типов включают: радиочастотный, магнитный мост, ультразвуковой и фотоэлектрический. Обычно используется для: высокоскоростного счета, обнаружения металлических предметов, контроля уровня, считывания кодовых меток и концевых выключателей. См. Индуктивный датчик.
Координаты импульса
Роботы Yaskawa определяют положение осей шарниров робота в градусах для поворотных шарниров.Импульс — это еще один способ указать положение сустава робота, и он используется при подсчете импульсов энкодера двигателя робота.
Обеспечение качества (ОК)
Описывает методы, политику и процедуры, необходимые для проведения тестирования обеспечения качества на этапе проектирования, производства и доставки, на этапах создания, перепрограммирования или обслуживания роботов.
Досягаемость: Объем пространства (конверт), которого может достичь рабочий орган робота, по крайней мере, в одной ориентации.
Квазистатический зажим
Тип контакта между человеком и частью робототехнической системы, при котором часть тела может быть зажата между подвижной частью роботизированной системы и другой неподвижной или подвижной частью роботизированной ячейки
Вылет
Объем пространства (оболочки), которого может достичь рабочий орган робота хотя бы в одной ориентации.
Система реального времени
Компьютерная система, в которой компьютер должен выполнять свои задачи в рамках временных ограничений некоторого процесса одновременно с системой, которой он помогает. Компьютер обрабатывает системные данные (входные данные) от датчиков с целью мониторинга и вычисления параметров (выходов) управления системой, необходимых для правильной работы системы или процесса. От компьютера требуется, чтобы он выполнял свою работу достаточно быстро, чтобы не отставать от оператора, взаимодействующего с ним через оконечное устройство (например, экран или клавиатуру).Оператор, взаимодействующий с компьютером, имеет возможность доступа, поиска и хранения через систему управления базами данных. Доступ к системе позволяет оператору вмешиваться и изменять работу системы.
Робот для воспроизведения записи
Манипулятор, для которого критические точки вдоль желаемых траекторий сохраняются последовательно путем записи фактических значений кодеров положения суставов робота, когда он перемещается под операционным управлением. Для выполнения задачи эти точки воспроизводятся в сервосистеме робота.См. Сервосистема.
Робот с прямоугольными координатами
Робот, рука манипулятора которого движется линейными движениями по набору декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. Рабочий конверт.
Надежность
Вероятность или процент времени, в течение которого устройство будет работать без сбоев в течение определенного периода времени или объема использования (R15.02). Также называется: время безотказной работы робота или среднее время наработки на отказ (MTBF).
Восстановление
Для обновления или модификации роботов в соответствии с пересмотренными спецификациями производителя. (R15.06)
Удаленный режим
Удаленный режим — это тип режима воспроизведения, в котором автоматическое выполнение программы робота инициируется с внешнего устройства (а не с обучающего пульта). В этом режиме использование обучающего пульта отключено.
Повторяемость
Мера того, насколько близко рука может повторно занять заданное положение.Например: после того, как манипулятор вручную помещен в определенное место, и это местоположение определено роботом, повторяемость определяет, насколько точно манипулятор может вернуться в это точное местоположение. Степень разрешения в системе управления роботом определяет повторяемость. В общем, воспроизводимость руки никогда не может быть лучше, чем ее разрешение. См. «Обучение и точность».
Разрешение
Количество шарнирного движения робота, необходимое для изменения положения на один счет.Хотя разрешение каждого датчика совместной обратной связи обычно является постоянным, разрешение конечной точки в мировых координатах не является постоянным для поворотных рычагов из-за нелинейности кинематики рычага.
Поворотный шарнир
Суставы робота, способные к вращательному движению.
Оценка рисков
Процесс оценки предполагаемого использования машины или системы на предмет прогнозируемых опасностей и последующего определения уровня риска, связанного с идентифицированными задачами.
Снижение рисков
Вторичный шаг в процессе оценки риска, который включает снижение уровня риска для идентифицированных задач путем применения мер по снижению риска с целью устранения или смягчения опасностей.
Робот
Перепрограммируемый многофункциональный манипулятор, предназначенный для перемещения материала, деталей, инструментов или определенных устройств посредством переменных запрограммированных движений для выполнения множества задач. Общие элементы, из которых состоит робот: контроллер, манипулятор и рабочий орган.См. Манипулятор, Контроллер и Рабочий орган.
Система координат робота
Система координат робота определяется в базовой оси робота, а точки в системе координат робота будут относиться к базе робота. Обратите внимание, что по умолчанию базовая система координат и система координат робота одинаковы. (см. рисунок справа)
Робот-интегратор
См. Интегратор.
Язык программирования роботов
Интерфейс между человеком-пользователем и роботом, который связывает человеческие команды с роботом.
Робот, контролирующий пределы диапазона
Следит за тем, чтобы рука манипулятора или его инструмент находились в обозначенной зоне безопасности
Моделирование роботов
Метод имитации и прогнозирования поведения и работы роботизированной системы на основе модели (например, компьютерной графики) физической системы. (R15.07)
Рулон
Вращение концевого эффектора робота в плоскости, перпендикулярной концу руки манипулятора.См. Pitch and Yaw.
Поворотный шарнир
Сустав, который скручивается, качается или изгибается вокруг оси.
Векторный привод вращения (RV)
Торговая марка устройства понижения скорости, которое преобразует низкий крутящий момент на высокой скорости в высокий крутящий момент на низкой скорости, обычно используемое на большой (большей) оси. См. Cyclo Drive и Harmonic Drive.
Вращательное движение
Сустав, который скручивается, качается или изгибается вокруг оси. Примером этого является локоть человеческой руки.
Гарантия
Барьерное ограждение, устройство или защитная процедура, предназначенные для защиты персонала. (R15.06)
Уровень полноты безопасности
Уровень полноты безопасности (SIL) — это метод IEC для определения уровня производительности системы безопасности. SIL 2 соответствует уровню эффективности ISO «d», а SIL 3 соответствует уровню эффективности ISO «e». ISO 10218 допускает использование того и другого.
Логическая схема безопасности
Логическая схема безопасности контролирует критически важные для безопасности внешние устройства, такие как световые завесы и генерируемые FSU сигналы.Логическая схема безопасности программируется через интуитивно понятный пользовательский интерфейс, поддерживаемый подвесным пультом программирования Yaskawa. Это позволяет настраивать логические операции, такие как остановка манипулятора или выдача сигнала, если сервоприводы включены.
Остановка с контролем безопасности
Совместная функция, разработанная для обеспечения безопасного взаимодействия человека и робота. Только когда движение робота прекращается, безопасность человека может войти в рабочее пространство для совместной работы. Сервоприводы могут оставаться под напряжением в соответствии с остановкой категории 2 в соответствии с ISO 10218-1: 2011, 5.4. Оценка рисков должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Робот SCARA
Цилиндрический робот, имеющий два параллельных шарнирных соединения (горизонтально шарнирно сочлененных) и обеспечивающий податливость в одной выбранной плоскости. (ISO 8373) Примечание: SCARA является производным от селективно совместимой руки для роботизированной сборки
Вторая исходная позиция
Помимо «исходного положения» манипулятора, второе исходное положение можно настроить как контрольную точку для абсолютных данных.Начальное значение второго исходного положения — это исходное положение (где все оси находятся на импульсе 0). Вторую исходную позицию можно изменить.
Режим безопасности
Уровни режимов оператора на контроллерах роботов Yaskawa включают в себя: режим работы, режим редактирования, режим управления, режим безопасности и режим одноразового управления.
Датчик
Инструменты, используемые в качестве устройств ввода для роботов, которые позволяют ему определять аспекты, касающиеся окружающей среды робота, а также собственное позиционирование робота.Датчики реагируют на физические стимулы (такие как тепло, свет, звук, давление, магнетизм и движение), и они передают результирующий сигнал или данные для измерения, управления или того и другого. (R15.06)
Сенсорная обратная связь
Переменные данные, измеряемые датчиками и передаваемые на контроллер в замкнутой системе. Если контроллер получает обратную связь, выходящую за пределы допустимого диапазона, значит, произошла ошибка. Контроллер отправляет роботу сигнал об ошибке.Робот вносит необходимые корректировки в соответствии с сигналом ошибки.
Сервоуправление
Процесс, с помощью которого система управления роботом проверяет, соответствует ли достигнутая поза робота позе, заданной при планировании движения, с требуемыми критериями производительности и безопасности. (ISO 8373)
Серводвигатель
Электроэнергетический механизм, используемый для движения или поддержания положения робота (например, двигатель, который преобразует электрическую энергию в движение робота) (R15.07). Двигатель реагирует на сигнал, полученный от системы управления, и часто включает энкодер для обеспечения обратной связи с контуром управления.
Сервопак
Электроэнергетический механизм переменного тока, управляемый с помощью логики, для преобразования энергии источника питания в форме синусоидальной волны в квадратную форму с широтно-импульсной модуляцией (ШИМ), подаваемую на двигатели для управления двигателем: скорость, направление, ускорение, замедление. и контроль торможения.
Робот с сервоприводом
Управление роботом с помощью сервосистемы с замкнутым контуром, в которой положение оси робота измеряется устройствами обратной связи и сохраняется в памяти контроллера.См. Система с обратной связью и Сервосистема.
Сервосистема
Система, в которой контроллер выдает команды на двигатели, двигатели приводят в движение рычаг, а датчик энкодера измеряет вращательные движения двигателя и сигнализирует о величине движения обратно контроллеру. Этот процесс продолжается много раз в секунду, пока рука не переместится в требуемую точку. См. Сервоуправляемый робот
Функция обнаружения удара
Обнаружение удара — это функция, поддерживаемая контроллером робота Yaskawa, которая снижает влияние столкновения робота путем остановки манипулятора без какого-либо внешнего датчика, когда инструмент или манипулятор сталкиваются с периферийным устройством.
Плечо
Первую или вторую ось робота иногда называют осью плеча, поскольку она чем-то напоминает человеческое плечо. Это часто используется при описании гуманоидных систем или систем с двумя руками, таких как Yaskawa Motoman® SDA10D.
SIL
См. Уровень полноты безопасности
Моделирование
Графическая компьютерная программа, представляющая робота и его окружающую среду, которая имитирует поведение робота во время имитации запуска робота.Это используется для определения поведения робота в определенных ситуациях, прежде чем фактически дать команду роботу выполнить такие задачи. Рассматриваются следующие элементы моделирования: 3D-моделирование окружающей среды, эмуляция кинематики, эмуляция планирования пути и моделирование датчиков. См. Сенсор, Прямая кинематика и Робот.
Сингулярность
Конфигурация, в которой два шарнира манипулятора робота становятся коаксиальными (выровненными по общей оси). В особой конфигурации плавное следование по траектории обычно невозможно, и робот может потерять управление.Термин происходит от поведения матрицы Якоби, которая становится сингулярной (т. Е. Не имеет обратной) в этих конфигурациях.
SLURBT
SLURBT — это термины, которые Yaskawa Motoman использует для описания каждой оси робота для удобства. Определение каждого значения следующее:
S — качели или вертлюги
L — нижний рычаг
U — Плечо
R — повернуть
B — Колено
Т — Twist
Функция настройки мягкого ограничения
Функция настройки Softlimit — это функция для установки диапазона ограничения перемещения оси движения манипулятора в программном обеспечении.
Контроль скорости и разделения
Совместная функция, которая позволяет оператору и роботу работать в непосредственной близости друг от друга, гарантируя, что робот замедлится и остановится до возникновения ситуации контакта. Для безопасной реализации этой функции необходимо использовать функциональную безопасность и дополнительное оборудование для обнаружения. Оценка риска должна использоваться, чтобы определить, необходимы ли какие-либо дополнительные меры безопасности для снижения рисков в роботизированной системе.
Сплайн
Гладкая непрерывная функция, используемая для аппроксимации набора функций, которые однозначно определены на наборе подинтервалов. Аппроксимирующая функция и набор аппроксимируемых функций пересекаются в достаточном количестве точек, чтобы обеспечить высокую степень точности приближения. Назначение плавной функции — позволить роботу-манипулятору выполнить задачу без рывков.
Сплайн Тип движения
Расчетный путь, который выполняет робот, который может иметь параболическую форму.Сплайновое движение может также создавать кривую произвольной формы со смесью круглых и параболических форм.
Системный интегратор
См. Интегратор.
Обучение
Чтобы запрограммировать руку манипулятора, вручную направляя ее через серию движений и записывая положение в память контроллера робота для воспроизведения.
Блокировка обучения
Пока установлена блокировка обучения, режим работы привязан к режиму обучения, и машины не могут воспроизводиться ни с помощью [СТАРТ], ни с внешнего входа.В целях безопасности всегда устанавливайте переключатель режима в положение «ОБУЧЕНИЕ» перед началом обучения.
Режим обучения
Режим контроллера робота, в котором робот-манипулятор программируется путем ручного управления им через серию движений и записи положения в память контроллера робота для воспроизведения. Промышленные роботы, у которых нет активной функции ограничения мощности и усилия, требуют использования трехпозиционного переключателя включения в режиме обучения.
Подвеска Teach
Портативный блок управления, который используется оператором для удаленного управления роботом при выполнении его задач.Движения записываются системой управления роботом для последующего воспроизведения. Современные промышленные роботы поставляются с подвесками для программирования, которые не только позволяют обучать роботов, но также поддерживают полнофункциональное программирование роботов и безопасный пользовательский интерфейс.
Окно обучения
Окно обучения — это экран пользовательского интерфейса на пульте программирования. Это окно содержит окно СОДЕРЖАНИЕ ЗАДАНИЯ, и в этом окне проводится обучение. Окно СОДЕРЖАНИЕ ЗАДАНИЯ содержит следующие элементы: номера строк, курсор, инструкции, дополнительные элементы, комментарии и т. Д.
Поперечная балка
Система обнаружения объектов, используемая в системе датчиков изображения робота. Точно сфокусированный луч света закреплен на одном конце, а детектор — на другом. Когда луч света прерывается, объект ощущается.
Функция измерения времени
Функция измерения времени измеряет время выполнения указанного раздела в задании или время вывода указанного сигнала.
Инструмент
Термин, используемый в широком смысле для определения рабочего устройства, установленного на конце манипулятора робота, такого как рука, захват, сварочная горелка, отвертка и т. Д.См. «Рука», «Захват» и «Рабочий орган».
Инструмент и рука Помехи
В системе с одним контроллером и несколькими манипуляторами функция проверки взаимодействия инструмента и рычага может использоваться для обнаружения возможных помех и предотвращения столкновений во время работы. Можно проверить следующие три шаблона:
Плечо против руки
Рычаг против инструмента
Инструмент против инструмента
Интерференция проверяется с помощью цилиндра, который немного больше, чем рычаг или инструмент.На обоих концах цилиндра помещается сфера. Если цилиндр и сферы одного манипулятора во время движения контактируют с цилиндрами другого манипулятора, манипуляторы останавливаются из-за обнаружения помех.
Центр инструмента (TCP)
Центральная точка инструмента (TCP) определяет вершину текущего инструмента, как определено относительно фланца инструмента. Например, для сварочного робота TCP обычно определяется на кончике сварочного пистолета. После определения и настройки TCP движение робота будет определено относительно этого кадра (т.е., вращение в направлении Rx вызовет вращение вокруг оси X, и позиции будут обучаться в этом кадре.
Контрольная точка инструмента
См. Центр инструмента
Координаты инструмента
Когда инструмент, прикрепленный к роботу, перемещается, движется его система координат инструмента относительно фиксированной системы координат, например мировых координат. Как правило, координаты инструмента не совпадают с мировыми координатами XYZ.
Рама для инструмента
Система координат, прикрепленная к рабочему органу робота (относительно базовой рамы).
Датчик касания
Чувствительное устройство, которое иногда используется с рукой или захватом робота, которое определяет физический контакт с объектом, тем самым давая роботу искусственное ощущение осязания. Датчики реагируют на контактные силы, возникающие между ними и твердыми предметами.
Построение траектории (расчет)
Вычисление функций движения, которые позволяют плавно контролировать движение суставов.
Преобразователь
Устройство, преобразующее энергию из одной формы в другую.Обычно это устройство, преобразующее входной сигнал в выходной сигнал другой формы. Его также можно рассматривать как устройство, которое преобразует статические сигналы, обнаруженные в окружающей среде (например, давление), в электрический сигнал, который отправляется в систему управления роботом.
Время работы
Период времени, в течение которого робот или производственная линия работают или доступны для работы, в отличие от времени простоя.
Настройка координат пользователя
Координаты пользователя определяются тремя точками, которые были обучены манипулятору с помощью осевых операций.Этими тремя определяющими точками являются ORG, XX и XY, как показано на диаграмме ниже. Эти три точки позиционных данных регистрируются в пользовательском файле координат. ORG — это исходное положение, а XX — точка на оси X. XY — это точка со стороны оси Y от пользовательских координат, которые были обучены, а направления осей Y и Z определяются точкой XY.
Пользовательская система координат
Пользовательская система координат — это любая контрольная точка, которую пользователь определил для своего приложения.Он часто прикрепляется к объекту, например к поддону, и позволяет пользователю обучать точкам относительно этого объекта. Например, набор положений может быть обучен относительно пользовательской системы координат, прикрепленной к поддону, а затем легко перенесен в другую пользовательскую систему координат на другом поддоне. Это позволяет эффективно повторно использовать позиции. См. Также «Настройка координат пользователя
Ручной вакуумный стакан
Рабочий орган для руки робота, который используется для захвата объектов легкого и среднего веса с помощью всасывания для манипуляций.К таким предметам может относиться стекло, пластик; и т. д. Обычно используется из-за его достоинств, заключающихся в уменьшении скольжения предметов, когда они находятся в пределах досягаемости вакуумной чашки. См. «Концевой эффектор».
Управление зрением
Система управления, в которой траектория робота изменяется в ответ на ввод от системы технического зрения.
Датчик технического зрения
Датчик, который определяет форму, местоположение, ориентацию или размеры объекта с помощью визуальной обратной связи, например, телекамеры.
Рабочий пакет
Набор всех точек, до которых манипулятор может добраться без вторжения. Иногда форма рабочего пространства и положение самого манипулятора могут ограничивать рабочий диапазон.
Рабочий конверт (космос)
Объем пространства, в котором робот может выполнять поставленные задачи.
Работа в исходном положении
Исходное рабочее положение является ориентиром для операций с манипулятором.Это предотвращает взаимодействие с периферийным устройством, гарантируя, что манипулятор всегда находится в пределах установленного диапазона в качестве предварительного условия для таких операций, как запуск линии. Манипулятор можно переместить в заданное рабочее исходное положение с помощью пульта программирования или ввода сигнала с внешнего устройства. Когда манипулятор находится в непосредственной близости от исходного рабочего положения, включается сигнал рабочего исходного положения.
Заготовка
Любая деталь, которая обрабатывается, совершенствуется или изготавливается до того, как станет готовым продуктом.
Рабочее пространство
Объем пространства, в котором робот может выполнять поставленные задачи.
Мировые координаты
Справочная система координат, в которой рычаг манипулятора движется линейно по набору декартовых или прямоугольных осей в направлениях X, Y и Z. Форма рабочего конверта образует прямоугольную фигуру. См. Прямоугольные координаты.
Мировая модель
Трехмерное представление рабочей среды робота, включая объекты, их положение и ориентацию в этой среде, которое хранится в памяти робота.Поскольку объекты обнаруживаются в окружающей среде, система контроллера робота постоянно обновляет модель мира. Роботы используют эту модель мира, чтобы определять свои действия для выполнения поставленных задач.
Запястье
Набор поворотных соединений между манипулятором и рабочим органом робота, которые позволяют ориентировать рабочий орган по отношению к обрабатываемой детали. В большинстве случаев запястье может иметь степени свободы, которые позволяют ему захватывать объект с ориентацией по крену, тангажу и рысканью.См. «Рука», «Рабочий орган», «Крен», «Шаг», «Рыскание» и «Деталь».
Запястье [вторичная ось]
Набор взаимосвязанных звеньев и механических соединений между рычагом и рабочим органом, который поддерживает, позиционирует и ориентирует рабочий орган. (ISO 8373)
Рыскание
Вращение рабочего органа в горизонтальной плоскости вокруг конца руки манипулятора. Боковое движение по оси. Смотрите Roll and Pitch.
3.4 Производные как скорость изменения — Объем расчетов 1
Цели обучения
- Определите новое значение количества из старого значения и суммы изменения.
- Рассчитайте среднюю скорость изменения и объясните, чем она отличается от мгновенной скорости изменения.
- Применяет скорость изменения к смещению, скорости и ускорению объекта, движущегося по прямой линии.
- Предскажите численность населения в будущем, исходя из текущей стоимости и темпов прироста населения.
- Используйте производные инструменты для расчета предельных затрат и доходов в деловой ситуации.
В этом разделе мы рассмотрим некоторые применения производной, сосредоточив внимание на интерпретации производной как скорости изменения функции. Эти приложения включают ускорение и скорость в физике, темпы роста населения в биологии и маргинальные функции в экономике.
Помимо анализа скорости, скорости, ускорения и положения, мы можем использовать производные для анализа различных типов популяций, в том числе таких разнообразных, как колонии бактерий и города.Мы можем использовать текущую популяцию вместе со скоростью роста, чтобы оценить размер популяции в будущем. Скорость прироста населения — это скорость изменения численности населения и, следовательно, может быть представлена производной от численности населения.
Определение
Если — количество сущностей, присутствующих в популяции, то темпы прироста населения определяются равными.
Оценка населения
Население города увеличивается в три раза каждые 5 лет.Если его нынешнее население составляет 10 000 человек, каково будет его примерное население через 2 года?
Известно, что в настоящее время в колонии комаров проживает 3000 человек; то есть, . Если, оцените численность популяции за 3 дня, где измеряется в днях.
В дополнение к анализу движения вдоль линии и роста населения, производные инструменты полезны при анализе изменений в стоимости, выручке и прибыли. Концепция маржинальной функции распространена в сфере бизнеса и экономики и подразумевает использование производных финансовых инструментов.Предельные затраты являются производной функции затрат. Предельная выручка является производной от функции выручки. Маржинальная прибыль i является производной функции прибыли, которая основана на функции затрат и функции дохода.
Мы можем приблизительно оценить
, выбрав соответствующее значение для. Поскольку представляет объекты, разумным и малым значением для является 1. Таким образом, подставляя, мы получаем приближение.Следовательно, данное значение можно рассматривать как изменение стоимости, связанное с производством одного дополнительного элемента. Аналогичным образом приближается доход, полученный от продажи одного дополнительного предмета, и приближается прибыль, полученная от производства и продажи одного дополнительного предмета.
Применение предельного дохода
Предположим, что прибыль, полученная от продажи обедов из жареной рыбы, равна. Используйте функцию маржинальной прибыли, чтобы оценить прибыль от продажи 101-го обеда из жареной рыбы.
Ключевые понятия
- Используя, можно оценить данные и.
- Скорость изменения положения — это скорость, а скорость изменения скорости — это ускорение. Скорость — это абсолютное значение или величина скорости.
- Темпы прироста населения и текущее население могут быть использованы для прогнозирования размера будущей популяции.
- Функции предельных затрат, предельного дохода и предельной прибыли можно использовать для прогнозирования, соответственно, затрат на производство еще одного изделия, дохода, полученного от продажи еще одного изделия, и прибыли, полученной от производства и продажи еще одного изделия.
Для следующих упражнений данные функции представляют положение частицы, движущейся вдоль горизонтальной линии.
- Найдите функции скорости и ускорения.
- Определите временные интервалы, когда объект замедляется или ускоряется.
1.
2.
Решение
а.
г. Ускоряться: ; Притормаживает:
3.
5. Мяч бросается вниз со скоростью 8 футов / с с вершины здания высотой 64 фута. Через несколько секунд его высота над землей будет равна.
- Определите, сколько времени требуется мячу, чтобы коснуться земли.
- Определите скорость мяча, когда он ударяется о землю.
[показать-ответ q = ”875579 ″] Показать решение [/ раскрыть-ответ]
[скрытый-ответ a =” 875579 ″] a. 5 футов / с b. 9 фут / с
7. Положение колибри, летящего по прямой линии в секундах, дано в метрах.
- Определите скорость птицы в сек.
- Определите ускорение птицы в сек.
- Определите ускорение птицы, когда скорость равна 0.
9. Функция позиции определяет положение грузового поезда в милях, где восток является положительным направлением и измеряется в часах.
- Определите направление, в котором движется поезд.
- Определите направление, в котором движется поезд.
- Определите временные интервалы, когда поезд замедляется или набирает скорость.
10. На следующем графике показано положение объекта, движущегося по прямой линии.
- Используйте график функции положения, чтобы определить временные интервалы, когда скорость положительная, отрицательная или нулевая.
- Нарисуйте график функции скорости.
- Используйте график функции скорости, чтобы определить временные интервалы, когда ускорение является положительным, отрицательным или нулевым.
- Определите временные интервалы, когда объект ускоряется или замедляется.
11. Функция затрат в долларах компании, производящей кухонные комбайны, определяется выражением, где — количество произведенных кухонных комбайнов.
- Найдите функцию предельных затрат.
- Найдите предельные затраты на производство 12 кухонных комбайнов.
- Найдите фактическую стоимость производства тринадцатого кухонного комбайна.
Решение
а.
г.
г. 6 долларов за товар, 0 долларов за товар
13. [T] Прибыль получается, когда выручка превышает затраты. Предположим, что функция прибыли производителя скейтбордов имеет вид, где — количество проданных скейтбордов.
- Найдите точную прибыль от продажи тридцатого скейтборда.
- Найдите функцию предельной прибыли и используйте ее для оценки прибыли от продажи тридцатого скейтборда.
Решение
а.
г.
г. Популяция бактерий увеличивается с 0 до 10 часов; впоследствии популяция бактерий уменьшается.
г. . Скорость роста бактерий уменьшается в течение первых 10 часов. После этого популяция бактерий сокращается.
17. Центростремительная сила объекта массы определяется выражением, где — скорость вращения, а — расстояние от центра вращения.
- Найдите скорость изменения центростремительной силы по отношению к расстоянию от центра вращения.
- Найдите скорость изменения центростремительной силы объекта массой 1000 кг, скоростью 13,89 м / с и расстоянием от центра вращения 200 метров.
Следующие вопросы касаются населения (в миллионах) Лондона по десятилетиям XIX века, которые перечислены в следующей таблице.
| Годы с 1800 | Население (в миллионах) |
|---|---|
| 1 | 0.8795 |
| 11 | 1.040 |
| 21 | 1,264 |
| 31 | 1,516 |
| 41 | 1,661 |
| 51 | 2,000 |
| 61 | 2,634 |
| 71 | 3,272 |
| 81 | 3,911 |
| 91 | 4,422 |
18.[Т]
- С помощью калькулятора или компьютерной программы найдите наиболее подходящую линейную функцию для измерения численности населения.
- Найдите производную уравнения в (a) и объясните ее физический смысл.
- Найдите вторую производную уравнения и объясните ее физический смысл.
Решение
а.
г. . Население увеличивается.
г. . Скорость роста населения постоянна.
19.[Т]
- С помощью калькулятора или компьютерной программы найдите наиболее подходящую квадратичную кривую по данным.
- Найдите производную уравнения и объясните ее физический смысл.
- Найдите вторую производную уравнения и объясните ее физический смысл.
Для следующих упражнений рассмотрим космонавта на большой планете в другой галактике. Чтобы узнать больше о составе этой планеты, космонавт бросает электронный датчик в глубокую траншею.Датчик каждую секунду передает свое вертикальное положение по отношению к положению космонавта. Сводка данных датчика падения отображается в следующей таблице.
| Время после сброса (с) | Позиция (м) |
|---|---|
| 0 | 0 |
| 1 | -1 |
| 2 | -2 |
| 3 | −5 |
| 4 | −7 |
| 5 | −14 |
20.[Т]
- С помощью калькулятора или компьютерной программы найдите квадратичную кривую, которая наилучшим образом соответствует данным.
- Найдите производную функции положения и объясните ее физический смысл.
- Найдите вторую производную функции положения и объясните ее физический смысл.
Решение
а.
г. . Это скорость датчика.
г. . Это ускорение датчика; это постоянное ускорение вниз.
21.[Т]
- С помощью калькулятора или компьютерной программы найдите кубическую кривую, которая наилучшим образом соответствует данным.
- Найдите производную функции положения и объясните ее физический смысл.
- Найдите вторую производную функции положения и объясните ее физический смысл.
- Используя результат (c), объясните, почему кубическая функция не является хорошим выбором для этой задачи.
Следующие задачи относятся к уравнениям Холлинга типа I, II и III.Эти уравнения описывают экологическое событие роста популяции хищников с учетом количества добычи, доступной для потребления.
Решение
а.
г. . Когда количество добычи увеличивается, рост хищника увеличивается.
г. . Когда количество добычи чрезвычайно мало, скорость роста хищников увеличивается, но когда количество добычи превышает определенный порог, скорость роста хищников начинает уменьшаться.
г. На более низких уровнях добычи жертве легче избежать обнаружения хищником, поэтому поедается меньше особей добычи, что приводит к меньшему росту хищников.
25. [T] Популяции зайца-снегоступа (в тысячах) и рыси (в сотнях), собранные за 7 лет с 1937 по 1943 год, показаны в следующей таблице. Заяц-снегоступы — основная добыча рыси.
| Численность зайца-снегоступа (тыс.) | Популяция рыси (сотни) |
|---|---|
| 20 | 10 |
| 55 | 15 |
| 65 | 55 |
| 95 | 60 |
- Постройте график точек данных и определите, какая функция типа Холлинга лучше всего соответствует данным.
- Используя значения параметров и, определите значения этих параметров, исследуя график данных.Напомним, что этот метод измеряет, какая ценность жертвы дает половинную максимальную ценность хищника.
- Постройте результирующие функции Холлинга I, II и III поверх данных. Был результат из части а. правильный?
Шар движется по одномерной системе координат со следующими параметрами движения в момент времени t O s: xo …
Шар движется по одномерной системе координат со следующими параметрами движения в момент времени t …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t = 0 с: x0 = 3.2 м и v0 = 0 м / с. Мяч имеет постоянное ускорение 1.9. м / с2 во время всего движения, которое происходит за время 3,3 с. Предположим, что ошибка в положении 6% приемлемо в этом приложении на протяжении всего движение. Сколько строк N понадобится в стол для моделирования …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t = 0 с: x0 = 6.9 м и v0 = 3,1 м / с. Мяч имеет постоянное ускорение 1,7 м / с2 во время всего движения, которое происходит за время 3,5 с. Предположим, что ошибка в положении 8% приемлемо в этом приложении на протяжении всего движение. Сколько строк N понадобится в стол для моделирования …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t = 0 с: x0 = 9.8 м и v0 = 0 м / с. В мяч имеет постоянное ускорение 1,7 м / с2 в течение всего движение, которое происходит за время 2,1 с. Предположим, что ошибка в позиция 5% приемлема в это приложение по всему движению. Как много строки N понадобятся в таблице для моделирования …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t = 0 с: x0 = 4.3 м и v0 = 0 м / с. В мяч имеет постоянное ускорение 2,6 м / с2 в течение всего движение, которое происходит за время 2,2 с. Предположим, что ошибка в в этом приложении допустима позиция 7% по всей движение. Сколько строк N понадобится в таблице для моделирования …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t = 0 с: x0 = 6.2 м и v0 = 0 м / с. В мяч имеет постоянное ускорение 2,8 м / с2 в течение всего движение, которое происходит за время 1,7 с. Предположим, что ошибка в в этом приложении допустима позиция 3% по всей движение. Сколько строк N понадобится в таблице для моделирования …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t …
Шар движется по одномерной системе координат со следующим параметры движения в момент времени t = 0 с: x0 = 7.3 м и v0 = 0 м / с. В мяч имеет постоянное ускорение 1,8 м / с2 в течение всего движение, которое происходит за время 2,2 с. Предположим, что ошибка в в этом приложении допустима позиция 7% по всей движение. Сколько строк N понадобится в таблице для моделирования …
Для каждого случая одномерного движения (вдоль оси s) используйте кинематические определения, чтобы получить …
Для каждого случая одномерного движения (вдоль оси s) используйте кинематические определения, чтобы получить решение (т.е. используйте dv / dt, v-ds / dt, vdv-ads для вывода уравнений — покажите всю работу). а) Ускорение частицы равно a = -0,0402 лф / с). Если частица имеет начальную скорость vo — 1200 футов / с, определите расстояние, пройденное частицей, когда ее конечная скорость будет 600 футов / с. Используйте так 0 для начальной позиции. б) Если скорость …
Пожалуйста, найдите в приложении следующую информацию о требуемой проблеме. : 1- Диаграмма движения с координатной осью …
Пожалуйста, найдите в приложении следующую информацию о требуемой проблеме. : 1- Диаграмма движения с координатной осью 2- положительный Vs.график времени 3- скорость Vs. график времени (хорошо обозначен) 4- найдите общее расстояние и время для всей пьесы и объясните, как это было определено (четким почерком пожалуйста). 5- Покажите математическую работу с соответствующими уравнениями, чтобы рассчитать все, что вас интересует, включая то, как долго был весь спектакль. Спасибо Квотербек Билл бросает мяч в …
4. Общее движение с единичными векторами и компонентами Объект подвергается следующим последовательным перемещениям: s…
4. Общее движение с единичными векторами и компонентами Объект подвергается следующим последовательным перемещениям: s (2i + 3j + 5k) m, s2 (6i- 9j + 2k) m и s3 (10i 8j -k) m. а) Найдите результирующее смещение в единицах векторов и компонентов. б) Укажите величину результирующего смещения. 2. Предположим, турист едет на 5 км к юго-западу от своего лагеря. Затем турист проходит 2 км 75 ° к северу от востока. а) Найдите перемещение туриста из своего лагеря. б) …
5.Общее движение с единичными векторами и компонентами Объект подвергается следующим последовательным перемещениям: s …
5. Общее движение с единичными векторами и компонентами Объект подвергается следующим последовательным перемещениям: s (2i + 3j + 5k) m, s2 (6i- 9j + 2k) m и s3 (10i 8j -k) m. а) Найдите результирующее смещение в единицах векторов и компонентов. б) Укажите величину результирующего смещения. 2. Предположим, турист едет на 5 км к юго-западу от своего лагеря. Затем турист проходит 2 км 75 ° к северу от востока.а) Найдите перемещение туриста из своего лагеря. б) …
сложение скоростей | Физика
Пассажир авиакомпании роняет монету, когда самолет движется со скоростью 260 м / с. {2} -2 \ left (9 \ text {.{2} [/ латекс]
дает
v y = −5,42 м / с.
Мы знаем, что квадратный корень из 29,4 имеет два корня: 5,42 и -5,42. Мы выбираем отрицательный корень, потому что знаем, что скорость направлена вниз, и мы определили положительное направление как вверх. Нет начальной горизонтальной скорости относительно плоскости и нет горизонтального ускорения, поэтому движение идет прямо вниз относительно плоскости.
Решение для (b)Поскольку начальная вертикальная скорость равна нулю относительно земли, а вертикальное движение не зависит от горизонтального движения, окончательная вертикальная скорость монеты относительно земли равна v y = -5.{2}} [/ латекс]
дает
v = 260,06 м / с.
Направление дает:
θ = tan −1 ( v y / v x ) = tan −1 (−5,42 / 260)
так что
θ = tan −1 (−0,0208) = — 1,19º.
Обсуждение
В части (а) конечная скорость относительно плоскости такая же, как если бы монета упала с земли на землю и упала 1.50 м. Этот результат соответствует нашему опыту; объекты в самолете падают так же, как когда самолет летит горизонтально, так и когда он неподвижен на земле. Этот результат справедлив и для движущихся автомобилей. В части (b) наблюдатель на земле видит совсем другое движение монеты. Самолет движется по горизонтали так быстро, что его конечная скорость едва превышает начальную. И снова мы видим, что в двух измерениях векторы складываются не так, как обычные числа — конечная скорость v в части (b) равна , а не (260 — 5.42) м / с; скорее 260,06 м / с. Величину скорости нужно было вычислить с точностью до пяти цифр, чтобы увидеть какое-либо отличие от скорости самолета. Движения, наблюдаемые разными наблюдателями (один в самолете и один на земле) в этом примере аналогичны тем, которые обсуждались для бинокля, сброшенного с мачты движущегося корабля, за исключением того, что скорость самолета намного больше, поэтому что два наблюдателя видят очень разных путей. (См. Рис. 7.) Кроме того, оба наблюдателя видят падение монеты 1.50 м по вертикали, но тот, что находится на земле, также видит, как он продвигается вперед на 144 м (этот расчет оставлен для читателя). Таким образом, один наблюдатель видит вертикальный путь, другой — почти горизонтальный.
Система осей шины и терминология, определенная стандартами SAE — x-engineer.org
Динамические характеристики дорожного транспортного средства во многом зависят от характеристик шины. Крутящий момент, создаваемый трансмиссией, передается на колесо через шину. Шина — это точка контакта транспортного средства с дорогой, поэтому ее свойства имеют решающее значение для динамического поведения транспортного средства.
«Точкой контакта» шины с дорогой на самом деле является поверхность. Когда шина накачана, вес транспортного средства оказывает на колесо нормальную (вертикальную) нагрузку, которая вызывает прогиб шины. Поверхность контакта шины с дорогой называется пятно контакта .
Чтобы иметь возможность анализировать силы и моменты, действующие на шину транспортного средства, особенно во время поворота, нам необходимо определить систему осей (координат) .Поскольку колесо может двигаться в трех направлениях, нам нужна трехмерная система координат. Существует несколько систем осей, наиболее распространенной из которых является система осей шин, определенная Обществом автомобильных инженеров (SAE) и ISO (Международной организацией по стандартизации).
Стандарт SAE, определяющий систему осей шины и терминологию, — это SAE J670 — Терминология динамики транспортного средства .
Изображения: Шина оси системы и терминологии, определенные стандарты SAE (правая дорога колесо)
Легенда :
х — продольная ось (направление колеса заголовка)
у — поперечная ось
г — вертикальная ось
О — начало системы осей
v — линейная скорость колеса
α — положительный угол скольжения
γ — положительный угол наклона
Ω — угловая скорость колеса
F x — тяговое усилие
F y — поперечное усилие
F z — нормальная сила
M x — опрокидывающий момент (момент)
M y — момент сопротивления качению (момент)
M z — центровочный момент (момент)
Начало координат ( O ) осевой системы он расположен в центре пятна контакта.Начало координат — это точка, определяемая пересечением трех плоскостей: горизонтальной (определяется xOy ), продольной (определяется xOz ) и вертикальной (определяется yOz ).
Ось x находится в плоскости колеса и параллельна продольной оси транспортного средства. Положительное направление оси x указывает на переднюю часть автомобиля.
Ось y перпендикулярна оси x, а положительное направление указывает на правую сторону колеса.
Ось z перпендикулярна дороге, положительное направление — вниз. В стандарте ISO (ISO 8855) положительное направление оси z направлено вверх.
Все три оси взаимно ортогональны , что означает, что они перпендикулярны друг другу. Начало координат ( O ) — это точка пересечения осей x, y и z.
Для сил и моментов, действующих на колесо, мы определим, какое направление является положительным .
Сила тяги F x — это продольная сила, положительная в прямом направлении (указывающая на переднюю часть автомобиля.
Поперечная сила F y положительна по отношению к справа, когда транспортное средство движется вперед по оси X.
Нормальная сила F z — это сила, прилагаемая дорогой к колесу. Она отрицательная, направленная вверх, и положительная, направленная вниз.
Опрокидывающий момент (момент) M x — это крутящий момент, который пытается повернуть колесо вокруг оси x (колесо опрокидывается). Направление вращения, полученное путем свертывания оси y на ось z, дает положительное направление вращения для M x .
Момент сопротивления качению M y — это крутящий момент, который препятствует вращению колеса вокруг оси y.Направление вращения, полученное путем свертывания оси z на ось x, дает положительное направление вращения для M y .
Центрирующий момент (момент) M z — это крутящий момент, который вращает колесо вокруг оси z. Направление вращения, полученное путем свертывания оси x на ось y, дает положительное направление вращения для M z .
На автомобилях с передним приводом (FWD) есть дополнительный крутящий момент, ведущий крутящий момент .Приводной крутящий момент противоположен крутящему моменту сопротивления качению и отвечает за ускорение транспортного средства.
Для получения дополнительной информации о системе оси шин и терминологии, пожалуйста, ознакомьтесь со стандартами:
- SAE J670_200801 — Терминология динамики транспортного средства
- ISO 8855: 2011 — Дорожные транспортные средства — Динамика транспортного средства и устойчивость к дороге — Словарь
Для любых вопросов или замечаний относительно этой статьи, пожалуйста, используйте форму комментариев ниже.
Не забывайте ставить лайки, делиться и подписываться!
Траектория и уравнение положения
Траектория — это геометрическая линия или путь, описываемый движущимся телом. В этом разделе мы будем изучать:
Понятие траектории и уравнение положения
Когда тело перемещается из одной точки в другую, оно делает это, описывая геометрическую линию в пространстве. Эта геометрическая линия называется траекторией , и она образована последовательными позициями конца вектора положения во времени. Следовательно, мы часто находим координаты x, y и z вектора положения, записанные как функции времени , например x (t), y (t) и z (t), чтобы представить эволюцию положения тел. со временем.
Траектория тела — это геометрическая линия , описываемая движущимся телом.
Уравнение положения Уравнение траектории или представляет вектор положения как функцию времени. Его выражение в декартовых координатах и в трех измерениях:
г → т = xti → + ytj → + ztk →
Где:
- r → (t): уравнение положения или уравнение траектории
- x (t) , y (t), z (t) : координаты как функция времени
- i →, j →, k →: это единичные векторы в направлениях осей OX, OY и OZ соответственно
Для тех задач, где вы работаете с меньшим количеством измерений, вы можете упростить предыдущую формулу, исключив ненужные термины.Таким образом, уравнение положения:
- В двух измерениях становится r → t = xti → + ytj → + ztk → = xti → + ytj →, поскольку z = 0
- В двух измерениях становится r → t = xti → + ytj → + ztk → = xti →, поскольку y = 0 и z = 0
Следующая анимация иллюстрирует концепцию уравнения положения или уравнение траектории .
Экспериментируй и учись
Данные
r → (t) = t + 1 · i → + 0.05 · t2 + 0,1 · t + 0,05 · j →
r → =
r → =
Траектория
На графике показана траектория (серая линия), по которой тело, представленное красной точкой, следует во времени. В нашем примере эта траектория задается уравнением траектории r⃗ (t) = (t + 1) · i⃗ + (0,05 · t 2 + 0,1 · t + 0,05) · j⃗ m, которое определяет в каждый момент времени t, который является вектором положения тела.
Перетащите ползунок времени и проверьте, как тело и его вектор положения изменяются при его перемещении. Вектор положения в каждый момент времени t получается путем подстановки значения t, которое вы выбрали в уравнение траектории.
Типы уравнений траектории
Помимо вышеприведенного выражения, существуют и другие способы выражения траектории движения тела. Ниже мы показываем другие типов уравнений положения или траектории :
- Параметрические уравнения траектории : Каждая из координат устанавливается как функция времени в форме x = x (t), y = y (t), z = z (t). Например, параметрические координаты тела, которое движется в плоскости x-y, могут быть:
- Явное уравнение траектории : оно получается путем удаления параметра t из предыдущих выражений и решения одной переменной в зависимости от другой.В нашем примере это будет:
- x = t + 2 ⇒t = x-2
- у = t2⇒y = (х-2) 2
- Неявное уравнение траектории : получается, если f (x, y) = 0 .
Рассмотрим следующий пример. Представьте, что поезд движется на восток на 50 метров каждую секунду. После первой секунды поезд находится в 50 метрах от отправной точки. После второй второй поезд находится в 100 м от отправной точки и так далее. Следовательно, мы могли написать:
- Движение x координата как функция времени: x = 50t m
- Уравнение положения : r → = 50ti → m
- Расстояние до начала координат , определяемое величиной вектора положения: r → = 50t
Пример
S.H.S. Мадрид-Барселона на первом этапе своего путешествия движется на восток со скоростью 50 метров в секунду и на север со скоростью 30 метров в секунду. Вычислить:
- Координата движения по оси x как функция времени
- Координата движения по оси Y как функция времени
- Уравнение положения поезда на исследуемом участке
- Расстояние до начала разреза как функция времени
Leave A Comment