
При прямолинейном движении зависимость координаты тела x от времени tимеет вид
помогите пж у нас зачет
x=0,6cos 157tT-?XM-?W-?
Чтобы период колебаний математического маятника увеличился в 4 раза, его длина равнадолжны быть изменения?A) уменьшается в 2 раза B) уменьшается в 16 … раз C) уменьшается в 16 раз D) уменьшается в 4 раза
Задача 1. Параллельно амперметру, имеющему сопротивление Rа = 0,5 Ом, подсоединён медный провод длиной l = 0,4 м и диаметром d = 0,001 м. Удельное соп … ротивление меди ρ = 1,7 • 10-8 Ом • м. Определите полную силу тока в цепи, если амперметр показывает силу тока Iа = 0,2 А.
пружина в спокойном состоянии имеет длину 0,2м. сила в 50H расстягивает ее на 0,01м. какую работу надо сделать чтобы расстянуть ее от 0,22 до 0,32?
Молю о помощи!!!! ВСЕ В ЗАКРЕПЕ!!! Нужно решить задачи. Помогите решить лабораторную работу!! Прошу вас!!!
Рассмотрите фотографию. Выпишите значения напряжения и силы тока.
Повторение. Взаимные превращения жидкости и газов. Твердые тела2. Выполните тест:2.1. Зависимость физических свойств от направления внутри кристалла, … называется:А) энтропией; Б) изотропией;В) анизотропией; Г) монотропией.2.2. Давление, которое производил бы водяной пар, если бы все остальные газы отсутствовали, называется:А) атмосферным давлением; Б) критическим давлением;В) парциальным давлением; Г) абсолютным давлением.2.3. Температура кипения жидкости:А) все время изменяется;Б) сначала возрастает, потом медленно убывает;В) остается постоянной;Г) не зависит от давления.2.4. Давление насыщенного пара:А) зависит от объема и температуры;Б) зависит от объема;В) не зависит от объема и температуры;Г) зависит от температуры.2.5. Какое из приведенных твердых тел кристаллическое?А) Парафин; Б) Смола; В) Пластмасса; Г) Соль.
температура в водоеме изменяется с глубиной от 20 до 16 °С и остается такой в течение длительного времени. Можно ли сказать, что такое состояние являе
… тся равновесным?
Можно ли сказать, что такое состояние являе
… тся равновесным?
Чему равно сопротивление железной линии электропередачи, если её длина равна 27 км, а площадь поперечного сечения провода — 120 мм2?
1. При прямолинейном движении зависимость координаты тела x от времени t имеет вид:
Вариант Задание 1
Параграфы 88-93 повторить выполнить упражнение 12. Выполнить тест Вариант 3679536 1. Задание 1 На рисунке изображены графики зависимости модуля скорости движения четырёх автомобилей от времени. Один из
Подробнее 2,5 2,5. a x, м/с 2 2,5
Часть 1 Ответами к заданиям 1 4 являются цифра, число или последовательность цифр.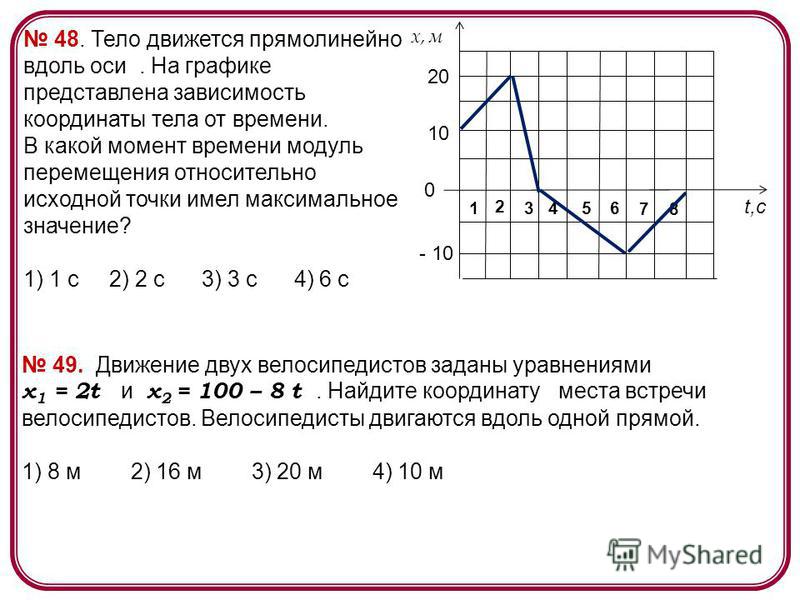 Запишите ответ в поле ответа в тексте работы, а затем перенесите в БЛАНК ОТВЕТОВ 1 справа от номера соответствующего задания,
Запишите ответ в поле ответа в тексте работы, а затем перенесите в БЛАНК ОТВЕТОВ 1 справа от номера соответствующего задания,
Физика ЕГЭ 2015 Тренировочный вариант 2
Часть 1 1. После толчка брусок скользит вверх по наклонной плоскости. В системе отсчета, связанной с плоскостью, направление оси 0x показано на рисунке. Направления векторов скорости бруска, его ускорения
Повторить параграфы Выполнить работу
Повторить параграфы 76-93 Выполнить работу Выполнить вариант ЕГЭ РЕШЕНИЯ РПАСПИСАТЬ!!! Вариант 3697168 1. Задание 1 Точечное тело Т начинает двигаться по окружности с центром в точке О. В момент начала
ПодробнееОбразовательный портал «РЕШУ ЕГЭ» (
Вариант 4920121 1. Два велосипедиста совершают кольцевую гонку с одинаковой угловой скоростью.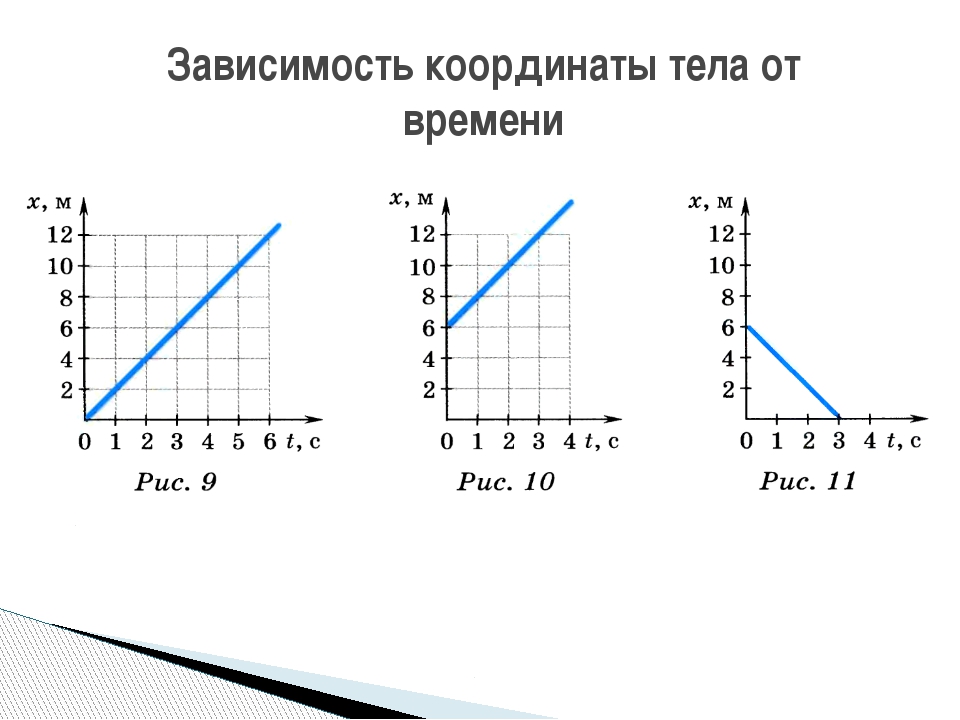 Положения и траектории движения велосипедистов показаны на рисунке. Чему равно отношение линейных скоростей
Положения и траектории движения велосипедистов показаны на рисунке. Чему равно отношение линейных скоростей
/6 A Б В Г Д
Вариант 3366482 1. На рисунке приведен график зависимости проекции скорости тела от времени. Чему равна проекция ускорения тела в момент времени 45 с? Ответ выразите в м/с 2. 2. На брусок массой 5 кг,
ПодробнееID_969 1/8 neznaika.pro
Вариант 1 Часть 1 Ответами к заданиям 1 23 являются слово, число или последовательность цифр или чисел. Запишите ответ в соответствующее поле справа. Каждый символ пишите без пробелов. Единицы измерения
Образовательный портал «РЕШУ ЕГЭ» (
Вариант 2593766 1. Тело, брошенное вертикально вверх со скоростью через некоторое время упало на поверхность Земли.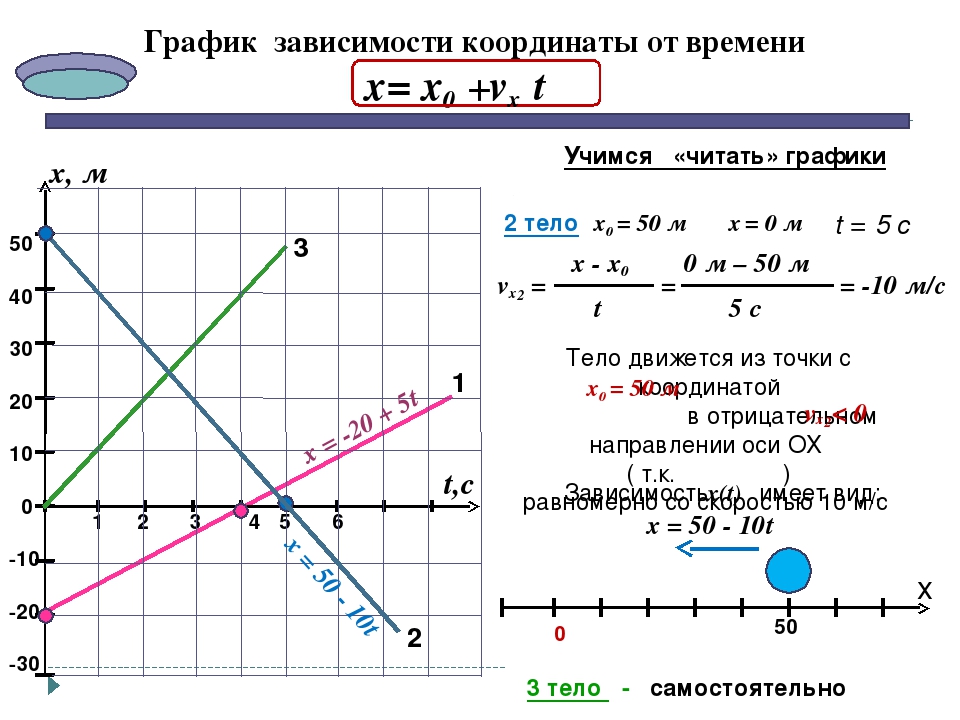 Какой график соответствует зависимости проекции скорости на ось ОХ от времени? Ось ОХ
Какой график соответствует зависимости проекции скорости на ось ОХ от времени? Ось ОХ
Открытый банк заданий ЕГЭ
Конденсатор колебательного контура длительное время подключён к источнику постоянного напряжения (см. рисунок). В момент t = 0 переключатель К переводят из положения 1 в положение 2. Графики А и Б представляют
Физика ЕГЭ 2015 Тренировочный вариант 1
Часть 1 1. Тело начинает двигаться из начала координат вдоль оси Ох, причем проекция скорости v x меняется с течением времени по закону, приведенному на графике. Через 2 с ускорение тела равно 1) 0 м/с
ПодробнееU m. 2) π. 1) 1, Дж 2) 5, Дж 3) 1, Дж 4) Дж
Колебательный контур состоит из катушки индуктивности и конденсатора. В нём наблюдаются гармонические электромагнитные колебания с периодом Т = 5 мс.
Отложенные задания (25)
Отложенные задания (25) В области пространства, где находится частица с массой 1 мг и зарядом 2 10 11 Кл, создано однородное горизонтальное электрическое поле. Какова напряжённость этого поля, если из
ПодробнееОлимпиада «Физтех» по физике
И. В. Яковлев Материалы по физике MathUs.ru Олимпиада «Физтех» по физике 11 класс, онлайн-этап, 2013/14 год 1. Камень, брошенный с крыши сарая почти вертикально вверх со скоростью 15 м/с, упал на землю
Задания 1. Физические величины
Задания 1. Физические величины 1. Задание 1 46. Для каждого физического понятия из первого столбца подберите соответствующий пример из второго столбца. Запишите в таблицу выбранные цифры под соответствующими
ПодробнееЗадание 1.
 Ответ: 31.
Ответ: 31.Задание 1. Установите соответствие между физическими величинами, описывающими протекание постоянного тока через резистор, и формулами для их расчёта. В формулах использованы обозначения: R сопротивление
а) 0,5 км/с, 2) 250 м/с 3) 22,4 м/с, 4) 501 м/с а) 0,25 V 0 t 0 2) V 0 t 0, 3) 2 V 0 t 0, 4) V 0 t 0 а) 44 0 С, 2) 36,6 0 С, 3) 34 0 С, 4) 301 К
V 1. График зависимости скорости тела от времени имеет вид полуокружности. Максимальная скорость тела V 0, время движения t 0. Определить путь пройденный телом. V 0 t 0 t 6. Снаряд массой 0 кг, летевший
ПодробнееОбразовательный портал «РЕШУ ЕГЭ» (
Вариант 4869897 ЕГЭ 01.04.2019. Досрочный экзамен по физике. Вариант 3 1. Тело движется вдоль оси Оx. По графику зависимости проекции скорости тела v x от времени t установите модуль перемещения тела за
t,, с v x, м/с 0 0,5 1 1,5 2
Вариант 5099261 1. Точечное тело равномерно движется по окружности радиусом 2 м. На рисунке изображён график зависимости угла поворота φ тела от времени t. Определите модуль линейной скорости этого тела
Точечное тело равномерно движется по окружности радиусом 2 м. На рисунке изображён график зависимости угла поворота φ тела от времени t. Определите модуль линейной скорости этого тела
Ответ: 35. Ответ: 21.
Задачи по теме «Электродинамика» (тексты Демидовой М.Ю. ЕГЭ-2017) Вариант 1 Задание 14. Пять одинаковых резисторов с сопротивлением 1 Ом соединены в электрическую цепь, через которую течёт ток I = 2 А
ПодробнееРавномерное прямолинейное движение
Равномерное движение – это движение с постоянной скоростью, то есть когда скорость не изменяется (v = const) и ускорения или замедления не происходит (а = 0).
Прямолинейное движение – это движение по прямой линии, то есть траектория прямолинейного движения – это прямая линия.
Равномерное прямолинейное движение – это движение,
при котором тело за любые равные промежутки времени совершает одинаковые перемещения.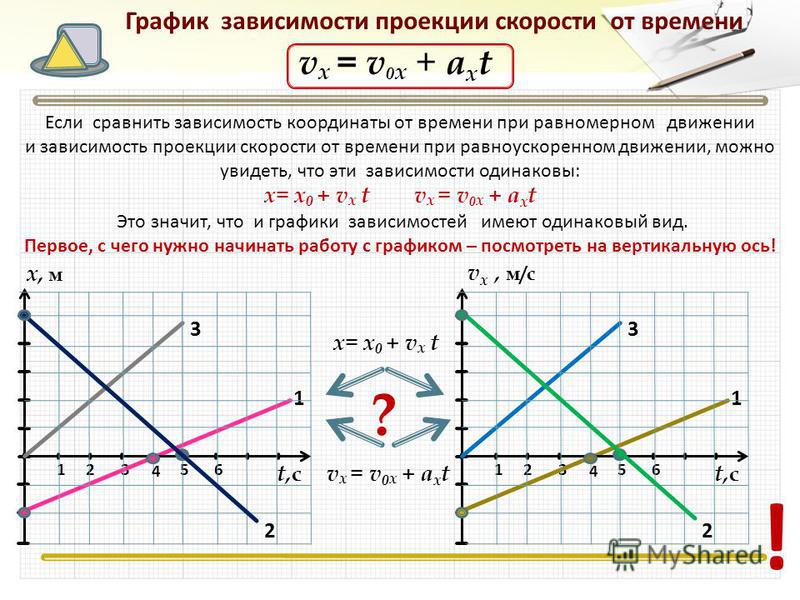 Например, если мы разобьём какой-то временной интервал на отрезки по одной секунде,
то при равномерном движении тело будет перемещаться на одинаковое расстояние за
каждый из этих отрезков времени.
Например, если мы разобьём какой-то временной интервал на отрезки по одной секунде,
то при равномерном движении тело будет перемещаться на одинаковое расстояние за
каждый из этих отрезков времени.
Скорость равномерного прямолинейного движения не зависит от времени и в каждой точке траектории направлена также, как и перемещение тела. То есть вектор перемещения совпадает по направлению с вектором скорости. При этом средняя скорость за любой промежуток времени равна мгновенной скорости:
vcp = vСкорость равномерного прямолинейного движения – это физическая векторная величина, равная отношению перемещения тела за любой промежуток времени к значению этого промежутка t:
= / t
Таким образом, скорость равномерного прямолинейного движения показывает, какое перемещение совершает материальная точка за единицу времени.
Перемещение при равномерном прямолинейном движении определяется формулой:
= • t
Пройденный путь при прямолинейном движении равен модулю перемещения. Если положительное направление оси ОХ совпадает с направлением движения,
то проекция скорости на ось ОХ равна величине скорости и положительна:
Если положительное направление оси ОХ совпадает с направлением движения,
то проекция скорости на ось ОХ равна величине скорости и положительна:
vx = v, то есть v > 0Проекция перемещения на ось ОХ равна:
s = vt = x – x0где x0 – начальная координата тела, х – конечная координата тела (или координата тела в любой момент времени)
Уравнение движения, то есть зависимость координаты тела от времени х = х(t), принимает вид:
х = x0 + vtЕсли положительное направление оси ОХ противоположно направлению движения тела, то проекция скорости тела на ось ОХ отрицательна, скорость меньше нуля (v
х = x0 - vt
Зависимость скорости, координат и пути от времени
Зависимость проекции скорости тела от времени показана на рис. 1.11. Так как скорость постоянна (v = const), то графиком скорости является прямая линия, параллельная оси времени Ot.
Рис. 1.11. Зависимость проекции скорости тела от времени при равномерном прямолинейном движении.
1.11. Зависимость проекции скорости тела от времени при равномерном прямолинейном движении.
Проекция перемещения на координатную ось численно равна площади прямоугольника ОАВС (рис. 1.12), так как величина вектора перемещения равна произведению вектора скорости на время, за которое было совершено перемещение.
Рис. 1.12. Зависимость проекции перемещения тела от времени при равномерном прямолинейном движении.
График зависимости перемещения от времени показан на рис. 1.13. Из графика видно, что проекция скорости равна
v = s1 / t1 = tg αгде α – угол наклона графика к оси времени. Чем больше угол α, тем быстрее движется тело, то есть тем больше его скорость (больший путь тело проходит за меньшее время). Тангенс угла наклона касательной к графику зависимости координаты от времени равен скорости:
tg α = v
Рис. 1.13. Зависимость проекции перемещения тела от времени при равномерном прямолинейном движении.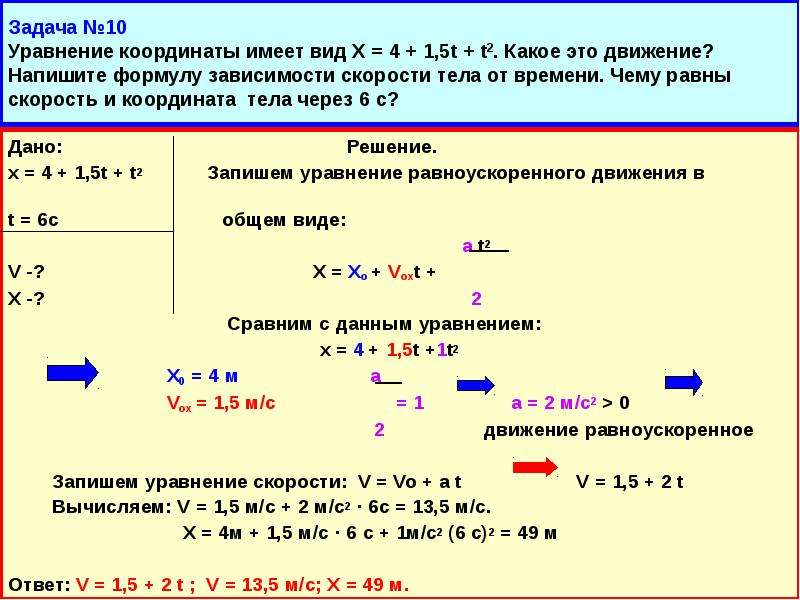
Зависимость координаты от времени показана на рис. 1.14. Из рисунка видно, что
tg α1 > tg α2следовательно, скорость тела 1 выше скорости тела 2 (v1 > v2).
tg α3 = v3 < 0Если тело покоится, то графиком координаты является прямая, параллельная оси времени, то есть
х = х0
Рис. 1.14. Зависимость координаты тела от времени при равномерном прямолинейном движении.
Задачи по физике на тему «Равнопеременное движение» (9, 11 классы)
Задачи на тему : Равнопеременное движение
Движение двух велосипедистов заданы уравнениями и Найдите координату x места встречи велосипедистов. Велосипедисты двигаются вдоль одной прямой. (Ответ дайте в метрах.) ответ: 20 м
Тело разгоняется на прямолинейном участке пути, при этом зависимость пройденного телом пути S от времени t имеет вид:
Чему равна скорость тела в момент времени t = 2 c при таком движении? (Ответ дайте в метрах в секунду. ) ответ:8 м/с
) ответ:8 м/с
При прямолинейном движении зависимость координаты тела x от времени t имеет вид:
Чему равна скорость тела в момент времени t = 2 c при таком движении? (Ответ дайте в метрах в секунду.) ответ: 16 м/с
Зависимость координаты x тела от времени t имеет вид:
Чему равна проекция скорости тела на ось Ox в момент времени t = 3 с при таком движении? (Ответ дайте в метрах в секунду.) ответ: 20 м/с
Зависимость координаты x тела от времени t имеет вид:
Чему равна проекция скорости тела на ось Ox в момент времени t = 1 с при таком движении? (Ответ дайте в метрах в секунду. ) ответ: 0
) ответ: 0
Зависимость координаты x тела от времени t имеет вид:
Через сколько секунд после начала отсчета времени t = 0 с проекция вектора скорости тела на ось Ox станет равной нулю? Ответ: 1,5 с
Небольшое тело движется вдоль оси Ox. Его координата x изменяется с течением времени t по закону
где выражено в секундах, а — в метрах. Чему равна проекция ускорения этого тела на ось Ox в момент времени ? (Ответ дайте в метрах в секунду в квадрате.) ответ: -2м/с2
Скорость тела, совершающего гармонические колебания меняется с течением времени в соответствии с уравнением где все величины выражены в СИ.
 Какова амплитуда колебаний скорости? (Ответ дайте в метрах в секунду.) ответ: 0,03 м/с
Какова амплитуда колебаний скорости? (Ответ дайте в метрах в секунду.) ответ: 0,03 м/сКолебательное движение тела задано уравнением:
 Какова амплитуда колебаний скорости? (Ответ дайте в метрах в секунду.) ответ: 0,03 м/с
Какова амплитуда колебаний скорости? (Ответ дайте в метрах в секунду.) ответ: 0,03 м/с
где Чему равна амплитуда колебаний? (Ответ дайте в сантиметрах.) ответ: 5 см
Гиря массой 2 кг подвешена на стальной пружине и совершает свободные колебания вдоль вертикально направленной оси Ox, координата x центра масс гири, выраженная в метрах, изменяется со временем по закону Чему равна кинетическая энергия гири в начальный момент времени? (Ответ выразите в джоулях.)
1-й способ
2-й способ
3-й способ
Поскольку координата центра масс гири меняется по закону х=0,4sin5t=x0sinω0t
скорость центра масс гири меняется согласно v=x0ω0cosω0t=0,45cos5t=2cos5t
В начальный момент скорость гири равна 2 м/с, а её кинетическая энергия E=(mv2)/2=4 Дж
Смещение груза пружинного маятника от положения равновесия меняется с течением времени по закону где период Т = 1 с.
Через какое минимальное время начиная с момента t = 0 потенциальная энергия маятника вернётся к своему исходному значению? Ответ выразите в секундах. Ответ: 0,5 с
 Через какое минимальное время начиная с момента t = 0 потенциальная энергия маятника вернётся к своему исходному значению? Ответ выразите в секундах. Ответ: 0,5 с
Через какое минимальное время начиная с момента t = 0 потенциальная энергия маятника вернётся к своему исходному значению? Ответ выразите в секундах. Ответ: 0,5 сОбъединение Физико-математическое, 2 курс
Просим Вас не высылать работы ценными письмами.
Желаем успехов!
Контрольная работа № 1
Объединение Физико-математическое, 2 курс
1. Два велосипедиста движутся друг за другом по шоссе: первый со скоростью ʋ1 = 5м/с, а второй с ʋ2 = 10м/с. Первоначальное расстояние между ними было s = 200м. Составить уравнения их движения, приняв направление оси Ох по движению, а за начало координат положение второго. Найти время и место встречи. Какое расстояние между ними будет через 60с?
2. Дано уравнения движения тела: х=100 – 20t +0,5t2 . Чему равны начальная координата, проекция начальной скорости и ускорения тела? В какой момент времени тело окажется в начале координат?
Чему равны начальная координата, проекция начальной скорости и ускорения тела? В какой момент времени тело окажется в начале координат?
3. Два велосипедиста движутся навстречу друг другу: первый со скоростью ʋ1 = 5м/с, а второй с ʋ2 = 10м/с. Первоначальное расстояние между ними было s = 200м. Составить уравнения их движения, приняв направление оси Ох по движению первого, а за начало координат положение второго. Найти время и место встречи. Какое расстояние между ними будет через 60с?
4. Дано уравнения движения тела: х= 25 – 20t +t2 . Чему равны начальная координата, проекция начальной скорости и ускорения тела? В какой момент времени тело окажется в начале координат?
5. Автомобиль движется по прямой улице. На графике представлена зависимость скорости автомобиля от времени. Чему равен максимальный модуль ускорения? Ответ выразите в м/с2.
6. Тело разгоняется на прямолинейном участке пути, при этом зависимость пройденного телом пути S от времени t имеет вид: S(t) = 4t + t2
Чему равна скорость тела в момент времени t = 2 c при таком движении? (Ответ дайте в метрах в секунду. )
)
7. При прямолинейном движении зависимость координаты тела x от времени t имеет вид: X = 5 + 2t + 4t2.
Чему равна скорость тела в момент времени t = 2 c при таком движении? (Ответ дайте в метрах в секунду.)
8. Зависимость координаты x тела от времени t имеет вид: x = 1 + 2t + 3t2.
Чему равна проекция скорости тела на ось Ox в момент времени t = 3 с при таком движении? (Ответ дайте в метрах в секунду.)
9. Зависимость координаты x тела от времени t имеет вид: x = 1 + 4t – 2t2.
Чему равна проекция скорости тела на ось Ox в момент времени t = 1 с при таком движении? (Ответ дайте в метрах в секунду.)
10. Зависимость координаты x тела от времени t имеет вид:
Через сколько секунд после начала отсчета времени t = 0 с проекция вектора скорости тела на ось Ox станет равной нулю?
11. На рисунке приведен график зависимости проекции скорости тела от времени. Чему равна проекция ускорения тела в момент времени 16 с? Ответ выразите в м/с2.
На рисунке приведен график зависимости проекции скорости тела от времени. Чему равна проекция ускорения тела в момент времени 16 с? Ответ выразите в м/с2.
12. На рисунке приведен график зависимости проекции скорости тела от времени. Чему равна проекция ускорения тела в момент времени 6 с? Ответ выразите в м/с2.
13. На рисунке приведен график зависимости проекции скорости тела от времени. Чему равна проекция ускорения тела в момент времени 26 с? Ответ выразите в м/с2.
14.
На рисунке приведен график зависимости проекции скорости тела от времени. Чему равна проекция ускорения тела в момент времени 54 с? Ответ выразите в м/с2.
15. Тело брошено вертикально вверх. Через 0,5 с после броска его скорость 20 м/с. Какова начальная скорость тела? Сопротивлением воздуха пренебречь. (Ответ дайте в метрах в секунду.)
(Ответ дайте в метрах в секунду.)
16. Автомобиль движется прямолинейно. На графике представлена зависимость скорости автомобиля от времени. Чему равен минимальный модуль ускорения? Ответ выразите в м/с2.
17. Тело брошено вертикально вверх с начальной скоростью 20 м/с. Чему равен модуль скорости тела через 0,5 c после начала отсчета времени? Сопротивление воздуха не учитывать. (Ответ дайте в метрах в секунду.)
18. Велосипедист съезжает с горки, двигаясь прямолинейно и равноускоренно. За время спуска скорость велосипедиста увеличилась на 10 м/с. Ускорение велосипедиста — 0,5 м/с2. Сколько секунд длился спуск?
19. На рисунке изображены графики зависимости модуля скорости движения четырёх автомобилей от времени. Один из автомобилей за первые 15 с движения проехал наибольший путь. Найдите этот путь. Ответ выразите в метрах.
Найдите этот путь. Ответ выразите в метрах.
20. На графике приведена зависимость скорости прямолинейно движущегося тела от времени. Определите модуль ускорения тела. (Ответ дайте в метрах в секунду в квадрате.)
21. Небольшое тело движется вдоль оси Ox. Его координата x изменяется с течением времени t по закону x(t) = 2 + t – t2
где t выражено в секундах, а x — в метрах. Чему равна проекция ускорения этого тела на ось Ox в момент времени ? (Ответ дайте в метрах в секунду в квадрате.)
22.
| Момент времени t, c | Координата тела x, м |
| 6,5 | |
Точечное тело начинает движение из состояния покоя и движется равноускоренно вдоль оси Оx по гладкой горизонтальной поверхности. Используя таблицу, определите значение проекции на ось Оx ускорения этого тела. (Ответ дайте в метрах в секунду в квадрате.)
Используя таблицу, определите значение проекции на ось Оx ускорения этого тела. (Ответ дайте в метрах в секунду в квадрате.)
23. На графике приведена зависимость скорости тела от времени при прямолинейном движении. Определите по графику ускорение тела. (Ответ дайте в метрах в секунду в квадрате.)
24. На графике приведена зависимость скорости тела от времени при прямолинейном движении. Определите по графику ускорение тела. (Ответ дайте в метрах в секунду в квадрате.)
25. На рисунке представлен график зависимости модуля скорости автомобиля от времени. Определите по графику путь, пройденный автомобилем в интервале от момента времени 0 с до момента времени 5 с после начала отсчета времени. (Ответ дайте в метрах.)
26. Мальчик съезжает на санках равноускоренно со снежной горки. Скорость санок в конце спуска 10 м/с. Ускорение равно 1 м/с2, начальная скорость равна нулю. Какова длина горки? (Ответ дайте в метрах.)
Ускорение равно 1 м/с2, начальная скорость равна нулю. Какова длина горки? (Ответ дайте в метрах.)
27.
Автомобиль трогается с места и движется с постоянным ускорением 5 м/с2. Какой путь прошёл автомобиль, если его скорость в конце пути оказалась равной 15 м/с? (Ответ дайте в метрах.)
28.
При равноускоренном движении автомобиля на пути 25 м его скорость увеличилась от 5 до 10 м/с. Чему равно ускорение автомобиля? (Ответ дайте в метрах в секунду в квадрате.)
29.
Велосипедист съезжает с горки, двигаясь равноускоренно. Начальная скорость велосипедиста равна нулю. У основания горки длиной 100 м скорость велосипедиста 10 м/с. Чему равно его ускорение? (Ответ дайте в метрах в секунду в квадрате.)
30. На рисунке приведён график зависимости проекции скорости тела vx от времени. Чему равна проекции ускорения этого тела ax в интервале времени от 6 с до 10 с? Ответ выразите в м/с2.
Чему равна проекции ускорения этого тела ax в интервале времени от 6 с до 10 с? Ответ выразите в м/с2.
Консультации Вы можете получить у преподавателей, предварительно договорившись по телефону в Кургане 8 (3522) 46-63-02 или в группе физико-математического объединения вКонтакте.
Электронная почта очно-заочной школы: [email protected]
Читайте также:
Рекомендуемые страницы:
Поиск по сайту
Урок 2. равномерное прямолинейное движение материальной точки — Физика — 10 класс
Физика, 10 класс
Урок 2. Равномерное прямолинейное движение материальной точки
Перечень вопросов, рассматриваемых в теме: 1) основная задача механики; 2) относительность механического движения; 3) система отсчёта, материальная точка, перемещение, траектория, скорость; 4) кинематическое уравнение.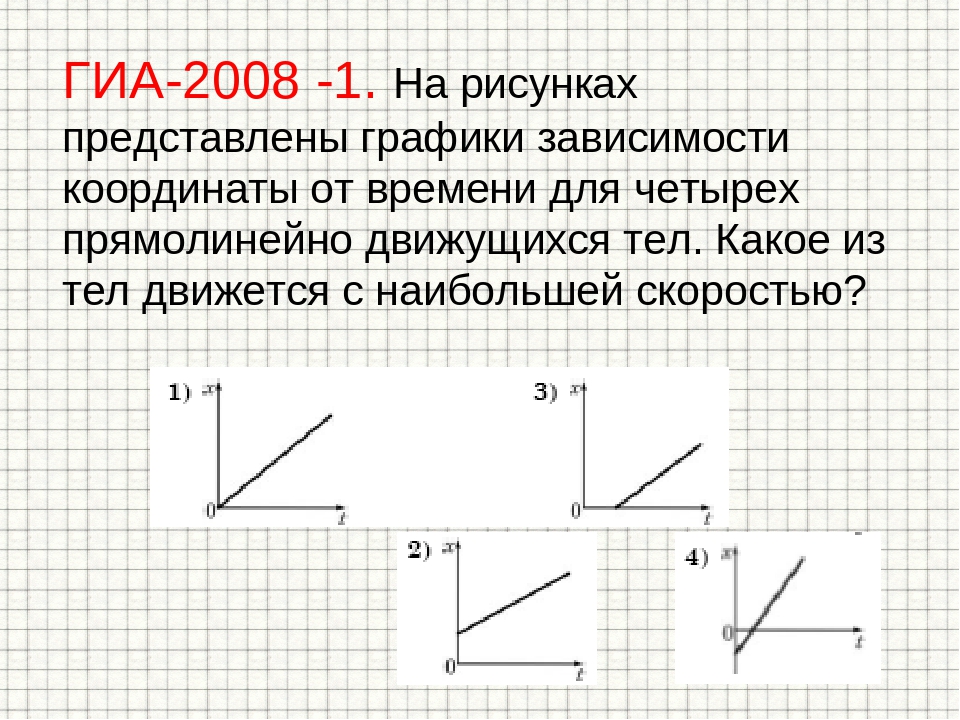
Глоссарий по теме:
Раздел механики, в котором изучается движение тел без выяснения причин, вызывающих данное движение, называют кинематикой.
Механическим движением тела называется изменение положения тела в пространстве относительно других тел с течением времени.
Материальной точкой называют тело, размерами и формой которого в условиях рассматриваемой задачи можно пренебречь. Тело, относительно которого рассматривается движение, называется телом отсчета. Совокупность тела отсчета, связанной с ним системы координат и часов называют системой отсчета.
Траектория — линия, по которой движется точка в пространстве.
Длину траектории, по которой двигалось тело в течение какого-то промежутка времени, называют путем, пройденным за этот промежуток времени.
Перемещением тела (материальной точки) называется вектор, соединяющий начальное положение тела с его последующим положением.
Равномерное прямолинейное движение – это движение, при котором за любые равные промежутки времени тело совершает равные перемещения.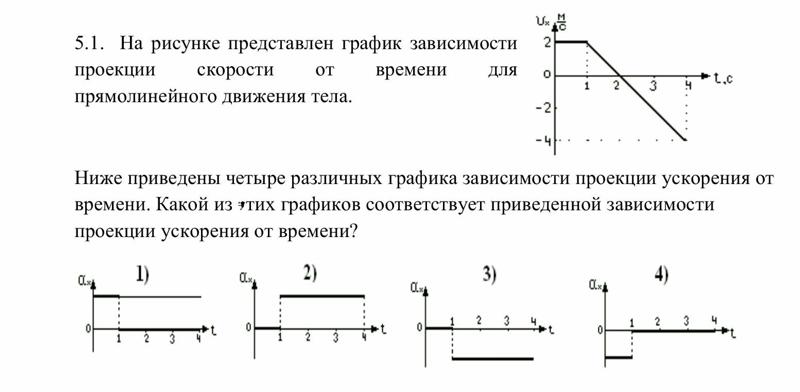
Скорость равномерного прямолинейного движения точки – величина, равная отношению перемещения к промежутку времени, в течение которого это перемещение произошло.
Относительность механического движения – это зависимость траектории движения тела, пройденного пути, перемещения и скорости от выбора системы отсчёта
Основная и дополнительная литература по теме урока:
Мякишев Г.Я., Буховцев Б.Б., Сотский Н.Н.. Физика.10 класс. Учебник для общеобразовательных организаций М.: Просвещение, 2016.– С.10-30.
Рымкевич А.П. Сборник задач по физике. 10-11 класс.-М.:Дрофа,2009.
Открытые электронные ресурсы по теме урока:
http://kvant.mccme.ru/1974/12/byvaet_li_ravnomernoe_dvizheni.htm.
Теоретический материал для самостоятельного изучения
Основная задача классической механики — определить положение тела в пространстве в любой момент времени. По характеру решаемых задач классическую механику делят на кинематику, динамику и статику. В кинематике описывают движение тел без выяснения причин, вызывающих данное движение. Раздел механики, в котором изучаются причины движения, называют динамикой. Статика — раздел механики, в котором изучаются условия равновесия абсолютно твердых тел. Законы сохранения импульса и энергии являются следствиями законов Ньютонов.
В кинематике описывают движение тел без выяснения причин, вызывающих данное движение. Раздел механики, в котором изучаются причины движения, называют динамикой. Статика — раздел механики, в котором изучаются условия равновесия абсолютно твердых тел. Законы сохранения импульса и энергии являются следствиями законов Ньютонов.
Механическим движением тела называется изменение положения тела в пространстве относительно других тел с течением времени. Сформулируем закон относительности движения: характер движения тела зависит от того, относительно каких тел мы рассматриваем движение. Нет абсолютно неподвижных тел.
Рассмотрим самое простое движение – прямолинейное равномерное движение. Описать движение тела – это значит, указать способ определения его положения в пространстве в любой момент времени.
Для описания движения нужно ввести некоторые понятия: материальная точка, траектория, путь, перемещение, координата, момент времени, промежуток времени, скорость. Материальной точкой называют тело, размерами которого в условиях рассматриваемой задачи можно пренебречь. Это первая физическая модель реальных тел. Практически всякое тело можно рассматривать как материальную точку в тех случаях, когда расстояния, проходимые точками тела, очень велики по сравнению с его размерами. Например, материальными точками считают Землю и другие планеты при изучении их движения вокруг Солнца. В данном случае различия в движении разных точек любой планеты, вызванные её суточным вращением, не влияют на величины, описывающие годовое движение. Но при решении задач, связанных с суточным вращением планет (например, при определении времени восхода солнца в разных местах поверхности земного шара), считать планету материальной точкой нельзя, так как результат задачи зависит от размеров этой планеты и скорости движения точек её поверхности.
Это первая физическая модель реальных тел. Практически всякое тело можно рассматривать как материальную точку в тех случаях, когда расстояния, проходимые точками тела, очень велики по сравнению с его размерами. Например, материальными точками считают Землю и другие планеты при изучении их движения вокруг Солнца. В данном случае различия в движении разных точек любой планеты, вызванные её суточным вращением, не влияют на величины, описывающие годовое движение. Но при решении задач, связанных с суточным вращением планет (например, при определении времени восхода солнца в разных местах поверхности земного шара), считать планету материальной точкой нельзя, так как результат задачи зависит от размеров этой планеты и скорости движения точек её поверхности.
Тело, движущееся поступательно, можно принимать за материальную точку даже в том случае, если его размеры соизмеримы с проходимыми им расстояниями. Поступательным называется такое движение абсолютно твердого тела, при котором любой отрезок, соединяющий любые две точки тела, остается параллельным самому себе.
Что нужно знать для того, чтобы в любой момент времени указать положение тела? Надо, во-первых, знать, где оно было в начальный момент времени; во-вторых, каков вектор перемещения в любой момент времени. Мы уже знаем, что движение любого тела относительно. Поэтому, изучая движение тела, мы обязательно указываем, относительно какого тела это движение рассматривается. Тело, относительно которого рассматривается движение, называется телом отсчета. Чтобы рассчитать положение материальной точки относительно выбранной точки отсчета, надо связать с ним систему координат и измерить время. Совокупность тела отсчета, связанной с ним системы координат и часов называют системой отсчета.
Рассмотрим два наиболее часто применяемых способа описания движения тел: координатный и векторный. В координатном способе положение тела в пространстве задается координатами, которые с течением времени меняются.
Рассмотрим движение материальной точки М с координатами (х, y, z) в момент времени t.
Математически это принято записывать в виде:
Количество координат зависит от условия задачи: на прямой – одна, в плоскости – две, в пространстве – три.
В векторном способе используется радиус-вектор. Радиус-вектор – это направленный отрезок, проведенный из начала координат в данную точку. Закон (или уравнение) движения в векторной форме — зависимость радиуса-вектора от времени:
Итак, для задания закона движения материальной точки необходимо указать либо вид функциональной зависимости всех трех ее координат от времени, либо зависимость от времени радиус-вектора этой точки.
Три скалярных уравнения или эквивалентное им одно векторное уравнение называются кинематическими уравнениями движения материальной точки.
Двигаясь, материальная точка занимает различные положения в пространстве относительно выбранной системы отсчета. При этом она «описывает» в пространстве какую-то линию. Линия, по которой движется точка в пространстве, называется траекторией. По форме траектории все движения делятся на прямолинейные и криволинейные. Траектория движения указывает все положения, которые занимала точка, но, зная траекторию, ничего нельзя сказать о том, быстро или медленно проходила точка отдельные участки траектории. Длину траектории, по которой двигалось тело в течение какого-то промежутка времени, называют путём, пройденным за этот промежуток времени, его обозначают буквой S. Путь – скалярная величина.
По форме траектории все движения делятся на прямолинейные и криволинейные. Траектория движения указывает все положения, которые занимала точка, но, зная траекторию, ничего нельзя сказать о том, быстро или медленно проходила точка отдельные участки траектории. Длину траектории, по которой двигалось тело в течение какого-то промежутка времени, называют путём, пройденным за этот промежуток времени, его обозначают буквой S. Путь – скалярная величина.
Для описания движения тела нужно указать, как меняется положение точек с течением времени. Если участки криволинейные, то изменение координат тела описывают с помощью такого понятия как перемещение. Перемещением тела (материальной точки) называется вектор, соединяющий начальное положение тела с его последующим положением. Обозначается на чертежах как направленный отрезок, соединяющий начальное и конечное положение тела в пространстве:
Путь и модуль перемещения могут совпадать по значению, только в том случае, если тело движется вдоль одной прямой в одном направлении.
Важной величиной, характеризующей движение тела, является его скорость. Скорость – векторная величина. Она считается заданной, если известен ее модуль и направление. Скорость равномерного прямолинейного движения точки – векторная величина, равная отношению перемещения к промежутку времени, в течение которого это перемещение произошло. Пусть радиус-вектор задает положение точки в начальный момент времени t0, а радиус-вектор- в момент времени t. Тогда промежуток времени:
,
и перемещение:
.
Подставляя выражение для скорости, получим:
Если начальный момент времени t0 принять равным нулю, то скорость равна:
Выразим отсюда радиус-вектор :
Это и есть уравнение равномерного прямолинейного движения точки, записанное в векторной форме. Оно позволяет найти радиус-вектор точки при этом движении в любой момент времени, если известны скорость точки и радиус-вектор, задающий ее положение в начальный момент времени.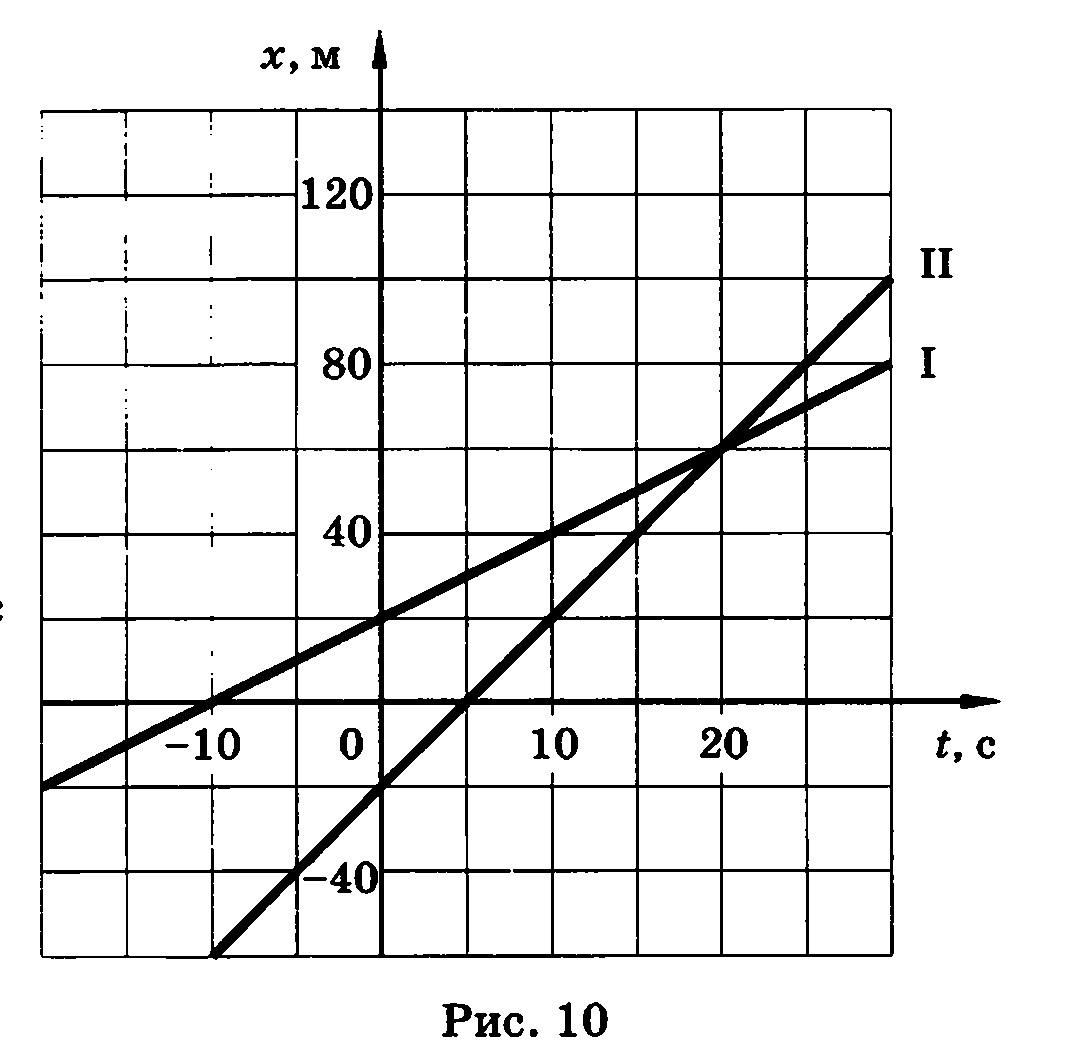 В проекциях на ось ОХ уравнение можно записать в виде:
В проекциях на ось ОХ уравнение можно записать в виде:
х=х0+vхt.
Это уравнение есть уравнение равномерного прямолинейного движения точки, записанное в координатной форме. Оно позволяет найти координату х тела при этом движении в любой момент времени, если известны проекция его скорости на ось ОX и его начальная координата х0.
Путь S, пройденный точкой при движении вдоль оси ОХ, равен модулю изменения ее координаты:
Его можно найти, зная модуль скорости
Строго говоря, равномерного прямолинейного движения не существует. Но приближенно на протяжении не слишком большого промежутка времени движение автомобиля можно считать равномерным и прямолинейным с достаточной для практических целей точностью. Таково одно из упрощений действительности, позволяющее без больших усилий описывать многие движения.
Полученные результаты можно изобразить наглядно с помощью графиков. Для прямолинейного равномерного движения график зависимости проекции скорости от времени очень прост. Это прямая, параллельная оси времени.
Это прямая, параллельная оси времени.
Как мы уже знаем, зависимость координаты тела от времени описывается формулой х=х0+𝞾хt. График движения представляет собой прямую линию:
Из второго рисунка видим, что углы наклона прямых разные. Угол наклона второй прямой больше угол наклона первой прямой , т.е за одно и тоже время тело, движущееся со скоростью , проходит большее расстояние, чем при движении со скоростью А значит А что же в случае 3, когда угол α < 0? В случае 3 тело движется в сторону, противоположную оси ОХ. Проекция скорости в случае 3 имеет отрицательное значение и график проходит ниже оси ОХ. Проекция скорости определяет угол наклона прямой х(t) к оси t и численно равна тангенсу угла
Относительность механического движения – это зависимость траектории движения тела, пройденного пути, перемещения и скорости от выбора системы отсчёта. В рамках классической механики время есть величина абсолютная, то есть протекающее во всех системах отсчета одинаково.
Примеры и разбор решения заданий
1. Тело движется равномерно и прямолинейно в положительном направлении оси ОХ. Координата тела в начальный момент времени равна xо = -10м. Найдите координату тела через 5с, если модуль её скорости равен ʋ=2 м/с. Какой путь проделало тело за это время?
Дано: xо = — 10 м, t = 5 c, ʋ = 2 м/с. Найти s, х.
Решение: координату точки найдем по формуле:
х = х0 + 𝞾х t
Так как направление вектора скорости совпадает с направлением оси координат, проекция вектора скорости положительна и равна ʋx=ʋ; тогда вычисляем:
х = — 10 + 2· 5 = 0 (м).
Пройденный путь найдем s = ʋ t; s = 2·5 = 10 м.
2. Равномерно друг за другом движутся два поезда. Скорость первого равна 72 км/ч, а скорость второго — 54 км/ч. Определите скорость первого поезда относительно второго.
Дано:
Найти .
Решение: Из условия задачи ясно, что векторы скоростей поездов направлены в одну сторону. По закону сложения скоростей запишем:
По закону сложения скоростей запишем:
,
где — искомая величина.
Находим проекцию скоростей на ось ОХ и записываем, чему равен модуль искомой величины
Ответ: .
Равноускоренное движение: формулы, примеры
Равноускоренное движение
Равноускоренное движение — это движение, при котором вектор ускорения не меняется по модулю и направлению. Примеры такого движения: велосипед, который катится с горки; камень брошенный под углом к горизонту. Равномерное движение — частный случай равноускоренного движения с ускорением, равным нулю.
Рассмотрим случай свободного падения (тело брошено под уголом к горизонту) более подробно. Такое движение можно представить в виде суммы движений относительно вертикальной и горизонтальной осей.
В любой точке траектории на тело действует ускорение свободного падения g→, которое не меняется по величине и всегда направлено в одну сторону.
Вдоль оси X движение равномерное и прямолинейное, а вдоль оси Y — равноускоренное и прямолинейное. Будем рассматривать проекции векторов скорости и ускорения на оси.
Формулы для равноускоренного движения
Формула для скорости при равноускоренном движении:
v=v0+at.
Здесь v0 — начальная скорость тела, a=const — ускорение.
Покажем на графике, что при равноускоренном движении зависимость v(t) имеет вид прямой линии.
Ускорение можно определить по углу наклона графика скорости. На рисунке выше модуль ускорения равен отношению сторон треугольника ABC.
a=v-v0t=BCAC
Чем больше угол β, тем больше наклон (крутизна) графика по отношению к оси времени. Соответственно, тем больше ускорение тела.
Для первого графика: v0=-2 мс; a=0,5 мс2.
Для второго графика: v0=3 мс; a=-13 мс2.
Слишком сложно?
Не парься, мы поможем разобраться и подарим скидку 10% на любую работу
Опиши заданиеПо данному графику можно также вычислить перемещение тела за время t. Как это сделать?
Как это сделать?
Выделим на графике малый отрезок времени ∆t. Будем считать, что он настолько мал, что движение за время ∆t можно считать равномерным движением со скоростью, равной скорости тела в середине промежутка ∆t. Тогда, перемещение ∆s за время ∆t будет равно ∆s=v∆t.
Разобьем все время t на бесконечно малые промежутки ∆t. Перемещение s за время t равно площади трапеции ODEF.
s=OD+EF2OF=v0+v2t=2v0+(v-v0)2t.
Мы знаем, что v-v0=at, поэтому окончательная формула для перемещения тела примет вид:
s=v0t+at22
Для того, чтобы найти координату тела в данный момент времени, нужно к начальной координате тела добавить перемещение. Изменение координаты в зависимости от времени выражает закон равноускоренного движения.
Закон равноускоренного движения
Закон равноускоренного движенияЕще одна распространенная задача кинематики, которая возникает при анализе равноускоренного движения — нахождение координаты при заданных значениях начальной и конечной скоростей и ускорения.
Исключая из записанных выше уравнений t и решая их, получаем:
s=v2-v022a.
По известным начальной скорости, ускорению и перемещению можно найти конечную скорость тела:
v=v02+2as.
При v0=0 s=v22a и v=2as
Важно!Величины v, v0, a, y0, s, входящие в выражения, являются алгебраическими величинами. В зависимости от характера движения и направления координатных осей в условиях конкретной задачи они могут принимать как положительные, так и отрицательные значения.
Графики движения с постоянной скоростью
Тело движется с равномерным прямолинейным движением (u.r.m.), когда оно имеет постоянную скорость , т. Е. Когда его траектория прямолинейна, а скорость постоянна. В этом разделе мы собираемся изучить график движения с постоянной скоростью , также известный как u.r.m. графики , то есть:
U.R.M. Графики
Положение-время (
x — т ) графикх = х0 + v⋅t
График положение-время (x-t) равномерного прямолинейного движения (u. пк). представляет время на горизонтальной оси (, t-ось ) и положение на вертикальной оси ( x-ось ). Обратите внимание на то, как положение (обычно x-координата ) увеличивается (или уменьшается) равномерно со временем. Мы можем выделить два случая, когда скорость положительна или когда она отрицательна:
пк). представляет время на горизонтальной оси (, t-ось ) и положение на вертикальной оси ( x-ось ). Обратите внимание на то, как положение (обычно x-координата ) увеличивается (или уменьшается) равномерно со временем. Мы можем выделить два случая, когда скорость положительна или когда она отрицательна:
Мы можем получить скорость по углу α. Для этого просто помните, что в прямоугольном треугольнике касательная к каждому из его углов определяется как противоположная сторона (катет), деленная на соседнюю :
tanα = противоположный катет, прилегающий катет = ∆x∆t = x-x0t = v
Величина наклона — это величина скорости.Следовательно, чем больше наклон прямой, тем выше скорость тела.
Скорость-время (
v — t ) графикv = v0 = cnst
График скорость-время (v-t) равномерного прямолинейного движения (u.r.m.) показывает, что скорость остается постоянной во времени.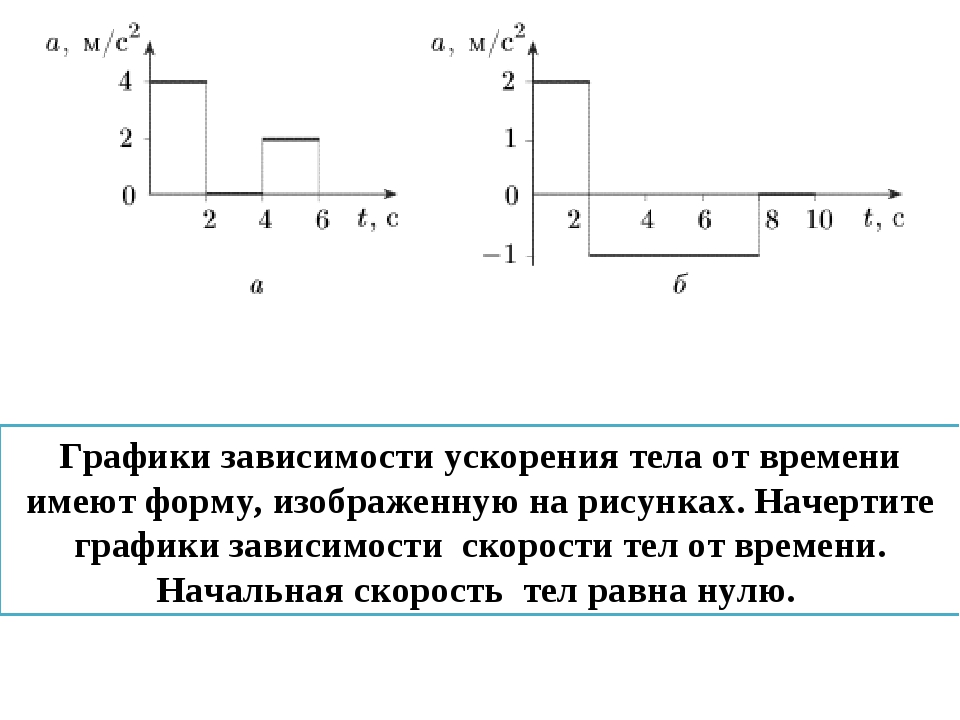 Опять же, мы можем выделить два случая:
Опять же, мы можем выделить два случая:
Обратите внимание, что площадь, заключенная под кривой между двумя моментами времени, — это пройденное расстояние.
График пройденного расстояния
Площадь, заключенная внутри прямой v-t, оси абсцисс и моментов времени t и t0, соответствует пройденному расстоянию. Это свойство действительно для любого движения.
В частности, для u.r.m., поскольку это площадь прямоугольника (основание x высота):
∆x = x-x0 = v · t-t0
В данном случае это просто расчет указанной площади, так как это прямоугольник. Но знаете ли вы, какой математический инструмент позволяет рассчитать площадь под кривой независимо от ее формы?
График времени разгона (
a — t )а = 0
График — время ускорения (a-t) равномерного прямолинейного движения (u.среднеквадратичное значение) показывает, что ускорение всегда равно нулю. В этом случае, является ли скорость тела положительной или отрицательной, существует только одна возможность, показанная на рисунке:
В этом случае, является ли скорость тела положительной или отрицательной, существует только одна возможность, показанная на рисунке:
Пример
Определите графики следующих равномерных прямолинейных движений:
- x = 3 + 4 · т
- x = 3 — 4 · т
- x = -3 + 4 · т
- x = -3 — 4 · т
- 3 · x = 9 + 12 · т
Где x измеряется в метрах, а t — в секундах.)РС.
(a) Каковы составляющие x- и y положения и скорости лыжника как функции времени? (b) Каковы ее положение и скорость при t = 10,0 с?
Рисунок 4.10 У лыжника есть ускорение 2,1 м / с22,1 м / с2 на спуске 15 ° 0,15 °. Начало системы координат находится в лыжной базе.Стратегия
Поскольку мы оцениваем компоненты уравнений движения в направлениях x и y , нам нужно найти компоненты ускорения и поместить их в кинематические уравнения. Компоненты ускорения находятся в системе координат на рисунке 4.10. Затем, вставив компоненты начального положения и скорости в уравнения движения, мы можем найти ее положение и скорость в более позднее время t .
Компоненты ускорения находятся в системе координат на рисунке 4.10. Затем, вставив компоненты начального положения и скорости в уравнения движения, мы можем найти ее положение и скорость в более позднее время t .Решение
(a) Начало системы координат находится на вершине холма с осью y- вертикально вверх и осью x- горизонтально. Если посмотреть на траекторию лыжника, то компонент ускорения x- будет положительным, а компонент y- — отрицательным.Поскольку угол составляет 15 ° 15 ° вниз по склону, находим ax = (2,1 м / с2) cos (15 °) = 2,0 м / с2ax = (2,1 м / с2) cos (15 °) = 2,0 м / с2 ay = (- 2,1 м / с2) sin15 ° = −0,54 м / с2.ay = (- 2,1 м / с2) sin15 ° = −0,54 м / с2.Подставляя начальное положение и скорость в уравнение 4.12 и 4.13 для x , получаем
x (t) = 75,0 м + (4,1 м / с) t + 12 (2,0 м / с2) t2x (t) = 75,0 м + (4,1 м / с) t + 12 (2,0 м / с2) t2 vx (t) = 4,1 м / с + (2,0 м / с2) t.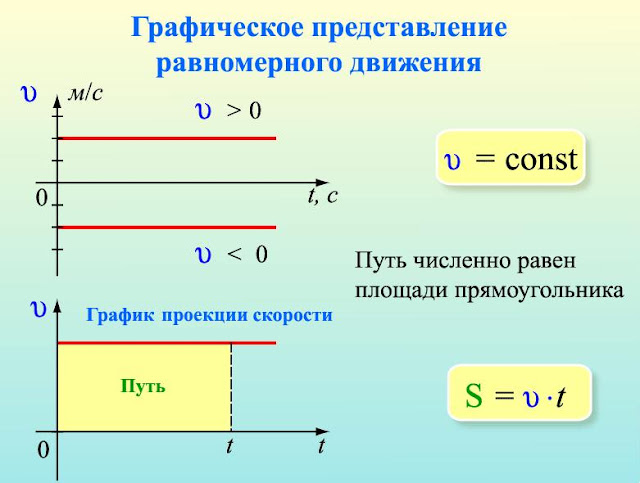 vx (t) = 4,1 м / с + (2,0 м / с2) t.
vx (t) = 4,1 м / с + (2,0 м / с2) t.Для у имеем
y (t) = — 50,0 м + (- 1,1 м / с) t + 12 (-0,54 м / с2) t2y (t) = — 50.0m + (- 1,1 м / с) t + 12 (-0,54 м / с2) t2 vy (t) = — 1,1 м / с + (- 0,54 м / с2) t.vy (t) = — 1,1 м / с + (- 0,54 м / с2) t.(b) Теперь, когда у нас есть уравнения движения для x и y как функции времени, мы можем оценить их как t = 10,0 с:
x (10,0 с) = 75,0 м + (4,1 м / с2) (10,0 с) +12 (2,0 м / с2) (10,0 с) 2 = 216,0 м x (10,0 с) = 75,0 м + (4,1 м / с2) (10,0 с ) +12 (2,0 м / с2) (10,0 с) 2 = 216,0 м vx (10,0 с) = 4,1 м / с + (2,0 м / с2) (10,0 с) = 24,1 м / svx (10,0 с) = 4,1 м / с + (2,0 м / с2) (10,0 с) = 24,1 м / с y (10,0 с) = — 50,0 м + (- 1,1 м / с) (10,0 с) +12 (-0,54 м / с2) (10.)РС.Величина скорости лыжника на 10,0 с составляет 25 м / с, что составляет 60 миль / ч.
Значение
Полезно знать, что, учитывая начальные условия положения, скорости и ускорения объекта, мы можем найти положение, скорость и ускорение в любое более позднее время.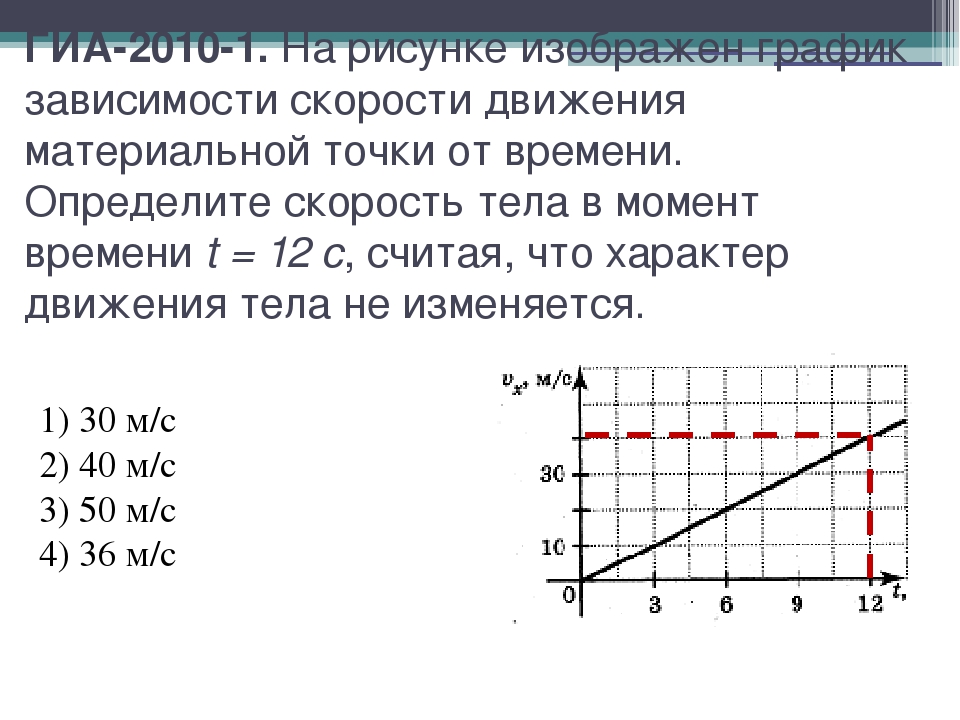
4.2 Вектор ускорения | Университетская физика, том 1,
Цели обучения
К концу этого раздела вы сможете:
- Рассчитайте вектор ускорения с учетом функции скорости в единичном векторе.
- Опишите движение частицы с постоянным ускорением в трех измерениях.
- Используйте одномерные уравнения движения вдоль перпендикулярных осей, чтобы решить задачу в двух или трех измерениях с постоянным ускорением.
- Выразите ускорение в единичном векторе.
Мгновенное ускорение
Помимо получения векторов смещения и скорости движущегося объекта, мы часто хотим знать его ускорение вектор в любой момент времени на его траектории.Этот вектор ускорения представляет собой мгновенное ускорение, и его можно получить из производной по времени функции скорости, как мы видели в предыдущей главе. Единственная разница в двух или трех измерениях состоит в том, что теперь это векторные величины.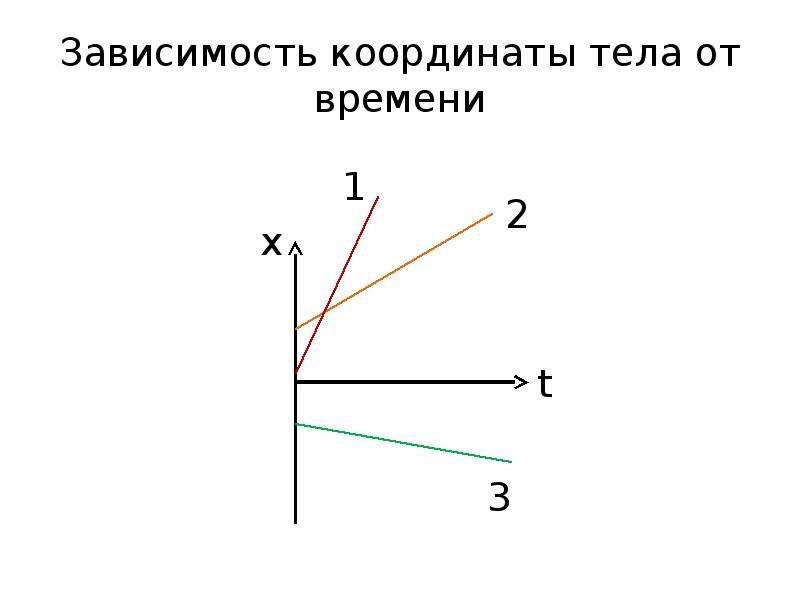 Взяв производную по времени [latex] \ overset {\ to} {v} (t), [/ latex], находим
Взяв производную по времени [latex] \ overset {\ to} {v} (t), [/ latex], находим
[латекс] \ overset {\ to} {a} (t) = \ underset {t \ to 0} {\ text {lim}} \ frac {\ overset {\ to} {v} (t + \ text {Δ } t) — \ overset {\ to} {v} (t)} {\ text {Δ} t} = \ frac {d \ overset {\ to} {v} (t)} {dt}.{2}) \ hat {i} + 5t \ hat {j} + 5t \ text {} \ hat {k} \ text {m}. [/ latex] (а) Какая скорость? б) Что такое ускорение? (c) Опишите движение от t = 0 с.
Стратегия
Мы можем получить некоторое представление о проблеме, посмотрев на функцию положения. Оно линейно в y и z , поэтому мы знаем, что ускорение в этих направлениях равно нулю, когда мы берем вторую производную. Также обратите внимание, что позиция в направлении x равна нулю для t = 0 с и t = 10 с.{2}. [/ latex] Вектор ускорения постоянен в отрицательном направлении оси x.
(в)
Покажи ответ Траекторию движения частицы можно увидеть на (Рисунок).
Давайте сначала посмотрим в направлениях y и z. Положение частицы постоянно увеличивается в зависимости от времени с постоянной скоростью в этих направлениях. Однако в направлении x частица следует по положительному положительному x до тех пор, пока t = 5 с, когда она меняет направление на противоположное. Мы знаем это, глядя на функцию скорости, которая в этот момент становится нулевой, а затем становится отрицательной.Мы также знаем это, потому что ускорение отрицательное и постоянное — это означает, что частица замедляется или ускоряется в отрицательном направлении. Положение частицы достигает 25 м, после чего она меняет направление и начинает ускоряться в отрицательном направлении оси x. Положение достигает нуля при t = 10 с.
Рисунок 4.9 Частица начинается в точке (x, y, z) = (0, 0, 0) с вектором положения [latex] \ overset {\ to} {r} = 0. [/ latex] Показана проекция траектории на плоскость xy.Значения y и z увеличиваются линейно как функция времени, тогда как x имеет точку поворота при t = 5 с и 25 м, когда он меняет направление. {2}, [/ latex] где a, b, и c — константы.Что можно сказать о функциональном виде функции скорости?
{2}, [/ latex] где a, b, и c — константы.Что можно сказать о функциональном виде функции скорости?
Вектор ускорения постоянный и не меняется со временем. Если a, b и c не равны нулю, то функция скорости должна быть линейной во времени. У нас есть [латекс] \ overset {\ to} {v} (t) = \ int \ overset {\ to} {a} dt = \ int (a \ hat {i} + b \ hat {j} + c \ hat {k}) dt = (a \ hat {i} + b \ hat {j} + c \ hat {k}) t \, \ text {m / s}, [/ latex], так как взятие производной функция скорости производит [латекс] \ overset {\ to} {a} (t).[/ latex] Если какой-либо из компонентов ускорения равен нулю, то этот компонент скорости будет постоянным.
Постоянное ускорение
Многомерное движение с постоянным ускорением можно рассматривать так же, как показано в предыдущей главе для одномерного движения. Ранее мы показали, что трехмерное движение эквивалентно трем одномерным движениям, каждое по оси, перпендикулярной другим.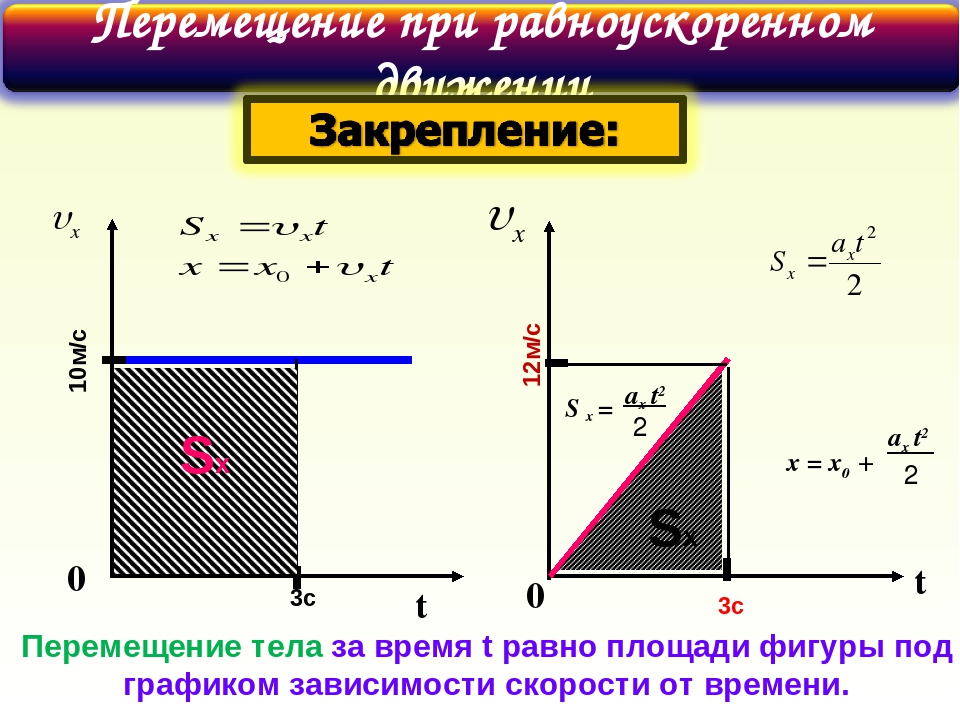 {2} +2 {a} _ {y} (y- {y} _ {0}).[/латекс]
{2} +2 {a} _ {y} (y- {y} _ {0}).[/латекс]
Здесь нижний индекс 0 обозначает начальное положение или скорость. (Рисунок) на (Рисунок) можно заменить на (Рисунок) и (Рисунок) без компонента z , чтобы получить вектор положения и вектор скорости как функцию времени в двух измерениях:
[латекс] \ overset {\ to} {r} (t) = x (t) \ hat {i} + y (t) \ hat {j} \, \ text {и} \, \ overset {\ to } {v} (t) = {v} _ {x} (t) \ hat {i} + {v} _ {y} (t) \ hat {j}. [/ латекс]
Следующий пример иллюстрирует практическое использование кинематических уравнений в двух измерениях.{2} [/ latex] вниз по склону [латекс] 15 \ text {°} [/ latex] при t = 0. С началом системы координат в передней части ложи, ее начальное положение и скорость являются
[латекс] \ overset {\ to} {r} (0) = (75,0 \ hat {i} -50,0 \ hat {j}) \, \ text {m} [/ latex]
и
[латекс] \ overset {\ to} {v} (0) = (4.1 \ hat {i} -1.1 \ hat {j}) \, \ text {m / s}. [/ латекс]
(a) Каковы составляющие x- и y положения и скорости лыжника как функции времени? (b) Каковы ее положение и скорость при t = 10.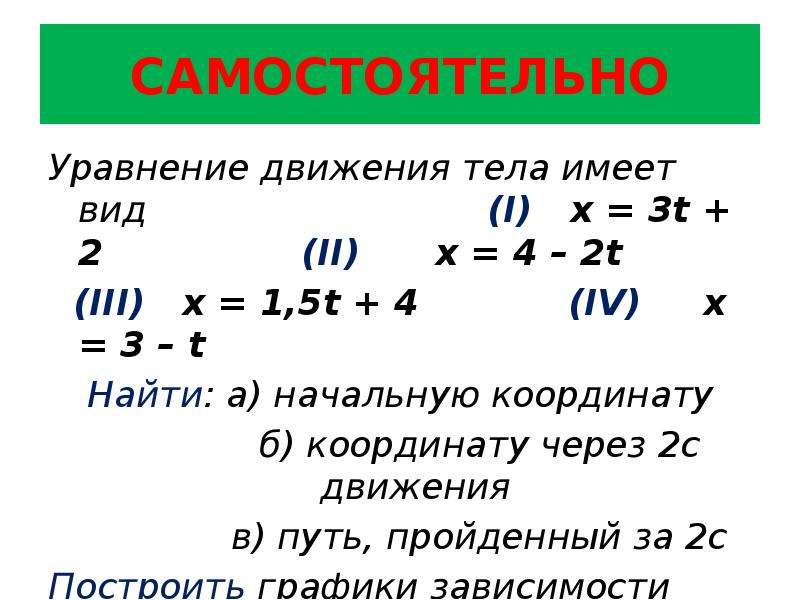 {2} [/ latex] по склону [латекс] 15 \ text {°}. [/ latex] Начало системы координат находится в лыжной базе.
{2} [/ latex] по склону [латекс] 15 \ text {°}. [/ latex] Начало системы координат находится в лыжной базе.
Стратегия
Поскольку мы оцениваем компоненты уравнений движения в направлениях x и y , нам необходимо найти компоненты ускорения и поместить их в кинематические уравнения. Компоненты ускорения находятся в системе координат на (Рисунок). Затем, вставив компоненты начального положения и скорости в уравнения движения, мы можем найти ее положение и скорость в более позднее время t .{2}) (10.0 \, \ text {s}) = — 6.5 \, \ text {m / s}. [/ latex] Положение и скорость при t = 10.0 с, наконец,
[латекс] \ overset {\ to} {r} (10.0 \, \ text {s}) = (216.0 \ hat {i} -88.0 \ hat {j}) \, \ text {m} [/ latex] [латекс] \ overset {\ to} {v} (10.0 \, \ text {s}) = (24.1 \ hat {i} -6.5 \ hat {j}) \ text {m / s}. [/ latex] Величина скорости лыжника на 10,0 с составляет 25 м / с, что составляет 60 миль / ч.
Значение
Полезно знать, что, учитывая начальные условия положения, скорости и ускорения объекта, мы можем найти положение, скорость и ускорение в любое более позднее время.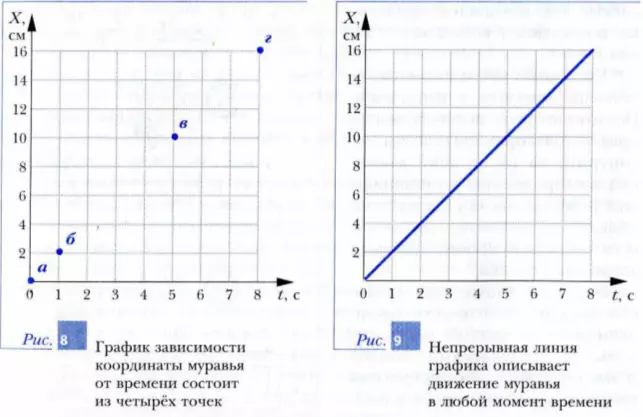
С (Рисунок) — (Рисунок) мы завершили набор выражений для положения, скорости и ускорения объекта, движущегося в двух или трех измерениях. Если траектории объектов выглядят как «красные стрелки» на начальном рисунке главы, то выражения для положения, скорости и ускорения могут быть довольно сложными. В следующих разделах мы исследуем два частных случая движения в двух и трех измерениях, рассматривая движение снаряда и круговое движение.
Сводка
- В двух и трех измерениях вектор ускорения может иметь произвольное направление и не обязательно указывать вдоль заданного компонента скорости.
- Мгновенное ускорение вызывается изменением скорости за очень короткий (бесконечно малый) период времени. Мгновенное ускорение — это вектор в двух или трех измерениях. Он находится путем взятия производной функции скорости по времени.
- В трех измерениях ускорение [латекс] \ overset {\ to} {a} (t) [/ latex] может быть записано как векторная сумма одномерных ускорений [latex] {a} _ {x} (t ), {a} _ {y} (t), \ text {and} \, {a} _ {z} (t) [/ latex] вдоль трасс x- , y — и z- осей.
- Кинематические уравнения для постоянного ускорения могут быть записаны как векторная сумма уравнений постоянного ускорения в направлениях x , y и z .

Концептуальные вопросы
Если функция положения частицы является линейной функцией времени, что можно сказать о ее ускорении?
Если объект имеет постоянную составляющую x скорости и внезапно испытывает ускорение в направлении y , изменится ли составляющая x его скорости?
Показать решение Нет, движения в перпендикулярных направлениях независимы.{2} \ hat {i}. [/ latex] Сильный ветер толкает лодку, придавая ей дополнительную скорость [latex] 2.0 \, \ text {м / с} \ hat {i} +1.0 \, \ text {m / s} \ hat { j}. [/ latex] (a) Какова скорость лодки при т = 10 с? (b) Каково положение лодки при т = 10 с? Нарисуйте эскиз траектории и положения лодки на отметке t = 10 с, показывая оси x и y .
Положение частицы для t > 0 определяется выражением [latex] \ overset {\ to} {r} (t) = (3.{2} [/ латекс],
г. [латекс] \ overset {\ to} {v} (2.0s) = (12.0 \ hat {i} -84.0 \ hat {j} +1.25 \ hat {k}) \ text {m / s} [/ latex] ,
г. [латекс] \ overset {\ to} {v} (1.0 \, \ text {s}) = 6.0 \ hat {i} -21.0 \ hat {j} +10.0 \ hat {k} \ text {m / s} , \, | \ overset {\ to} {v} (1.0 \, \ text {s}) | = 24.0 \, \ text {m / s} [/ latex]
[латекс] \ overset {\ to} {v} (3.0 \, \ text {s}) = 18.0 \ hat {i} -189.0 \ hat {j} +0,37 \ hat {k} \ text {м / с }, [/ latex] [latex] | \ overset {\ to} {v} (3.0 \, \ text {s}) | = 199.0 \, \ text {m / s} [/ latex],
e. [латекс] \ overset {\ to} {r} (t) = (3.{-2} \ hat {k}) \ text {cm} [/ latex]
[латекс] \ begin {array} {cc} \ hfill {\ overset {\ to} {v}} _ {\ text {avg}} & = 9.0 \ hat {i} -49.0 \ hat {j} -6.3 \ hat {k} \ text {m / s} \ hfill \ end {array} [/ latex]
Ускорение частицы — постоянная величина. При t = 0 скорость частицы равна [latex] (10 \ hat {i} +20 \ hat {j}) \ text {m / s}. [/ latex] При t = 4 с скорость [латекс] 10 \ hat {j} \ text {м / с}. [/ latex] а) Каково ускорение частицы? б) Как положение и скорость меняются со временем? Предположим, что частица изначально находится в начале координат.
При t = 0 скорость частицы равна [latex] (10 \ hat {i} +20 \ hat {j}) \ text {m / s}. [/ latex] При t = 4 с скорость [латекс] 10 \ hat {j} \ text {м / с}. [/ latex] а) Каково ускорение частицы? б) Как положение и скорость меняются со временем? Предположим, что частица изначально находится в начале координат.
У частицы есть функция положения [latex] \ overset {\ to} {r} (t) = \ text {cos} (1.0t) \ hat {i} + \ text {sin} (1.0t) \ hat { j} + t \ hat {k}, [/ latex], где аргументы функций косинуса и синуса выражены в радианах. а) Что такое вектор скорости? б) Что такое вектор ускорения?
Показать решениеа. [латекс] \ overset {\ to} {v} (t) = \ text {−sin} (1.0t) \ hat {i} + \ text {cos} (1.0t) \ hat {j} + \ hat { k} [/ латекс], б. [латекс] \ overset {\ to} {a} (t) = \ text {−cos} (1.0t) \ hat {i} — \ text {sin} (1.0t) \ hat {j} [/ latex]
Реактивный самолет Lockheed Martin F-35 II Lighting взлетает с авианосца с длиной взлетно-посадочной полосы 90 м и скоростью взлета 70 м / с в конце взлетно-посадочной полосы. {2} [/ latex] на [latex] 30 \ text {°} [/ latex] по отношению к горизонтали. (а) Каково начальное ускорение F-35 на палубе авианосца, чтобы он поднялся в воздух? (b) Запишите положение и скорость F-35 в единичном векторе с точки, когда он покидает палубу авианосца. (c) На какой высоте находится истребитель через 5,0 с после выхода из палубы авианосца? (г) Каковы его скорость и скорость в это время? д) Как далеко он продвинулся по горизонтали?
{2} [/ latex] на [latex] 30 \ text {°} [/ latex] по отношению к горизонтали. (а) Каково начальное ускорение F-35 на палубе авианосца, чтобы он поднялся в воздух? (b) Запишите положение и скорость F-35 в единичном векторе с точки, когда он покидает палубу авианосца. (c) На какой высоте находится истребитель через 5,0 с после выхода из палубы авианосца? (г) Каковы его скорость и скорость в это время? д) Как далеко он продвинулся по горизонтали?
Глоссарий
- вектор ускорения
- мгновенное ускорение, полученное путем взятия производной функции скорости по времени в обозначении единичного вектора
4.ДВИЖЕНИЕ НА САМОЛЕТЕ
4. ДВИЖЕНИЕ НА САМОЛЕТЕ В главе 2 мы обсуждали движение объекта в одном измерении. это
позиция однозначно определялась ее удаленностью (положительной или отрицательной) от
пользовательское происхождение. Движение этого объекта можно описать в терминах
скаляров. Обсуждение движения в двух или трех измерениях более
сложный. Чтобы ответить на вопрос «где я?» в двух измерениях, одно
необходимо указать две координаты.В трех измерениях нужно указать
три координаты. Для определения положения объекта используется концепция
Необходимо ввести вектор позиции . Вектор положения определяется как вектор, который начинается в (определяемой пользователем) исходной точке и заканчивается в
текущее положение объекта (см. рисунок 4.1). В целом позиция
вектор будет зависеть от времени
(т).
Используя методы, разработанные в главе 3, мы можем записать вектор положения по составным частям:
Обсуждение движения в двух или трех измерениях более
сложный. Чтобы ответить на вопрос «где я?» в двух измерениях, одно
необходимо указать две координаты.В трех измерениях нужно указать
три координаты. Для определения положения объекта используется концепция
Необходимо ввести вектор позиции . Вектор положения определяется как вектор, который начинается в (определяемой пользователем) исходной точке и заканчивается в
текущее положение объекта (см. рисунок 4.1). В целом позиция
вектор будет зависеть от времени
(т).
Используя методы, разработанные в главе 3, мы можем записать вектор положения по составным частям:
Рисунок 4.1. Определение вектора положения.
Примечание : В главе 2 мы привыкли строить положение
объект, его скорость и ускорение как функция времени. Через два или три
размеров, это намного сложнее, и большинство графиков, например, покажет
траектории движения объекта (без предоставления прямой информации о
время).
Определяется скорость объекта в двух или трех измерениях. аналогично его определению в главе 2:
Это уравнение показывает, что скорость объекта в два или три размеры тоже вектор.Опять же, вектор скорости может разложить на три компонента:
Компоненты (т) можно вычислить из соответствующих компонентов вектора положения (т):
Делаем вывод:
ускорение объекта в три измерения определены аналогично его определению в главе 2:
Это уравнение показывает, что ускорение объекта в два или три Размеры — это тоже вектор, который можно разложить на три составляющие:
Компоненты (т) можно вычислить из соответствующих компонентов вектора положения (т) и вектор скорости (т):
Делаем вывод:
Предполагая постоянное ускорение в направлениях x, y и z, мы можем запишите следующие уравнения движения:
v x (t) = v x0 + a x t
v y (t) = v y0 + a y t
v z (t) = v z0 + a z t
Величину скорости как функцию времени можно вычислить:
Если мы посмотрим на очень маленький интервал времени, изменение скорости
вектор будет маленьким. В этом лимите:
В этом лимите:
Величину скорости для малых интервалов времени можно записать как:
Из этой формулы можно сделать вывод:
Пример задачи 4-2 — 4-4
Кролик пробегает по стоянке, на которой оси координат, как ни странно, нарисованы.Путь таков, что компоненты положения кролика относительно начала система координат задается как функция времени
Единицы числовых коэффициентов в этих уравнениях такие что если вы подставите t в секунды, x и y будут в метрах.
Вектор положения кролика в момент времени t может быть выражен как:
Из уравнений движения для x (t) и y (t) можно вычислить скорость и ускорение:
Ускорение кролика постоянно (не зависит от времени).
Скалярное произведение скорости и ускорения скажет нам кое-что об изменении скорости кролика:
Из этого уравнения заключаем, что при t <14,6 с (отрицательный скаляр произведение) кролик замедлится, а при t> 14,6 с (положительный скаляр product) скорость кроликов увеличится. Чтобы проверить это предсказание, мы рассчитать величину скорости кролика:
Скорость кролика имеет минимум при t = 14.6 с.
Мы начнем рассматривать движение снаряда в двух измерениях. В система координат, которая будет использоваться для описания движения снаряда состоят из оси x (горизонтальное направление) и оси y (вертикальное направление). Предполагая, что мы имеем дело с постоянным ускорением, мы можем получить скорость и положение снаряда, используя процедуру, описанную в главе 2:
где x 0 и y 0 — координаты x и y
объект в момент t = 0 с, а v x0 и v y0 являются координатами x и y
компоненты скорости объекта в момент времени t = 0. Обратите внимание, что
a x влияет только на v x , но не на v y , и
a y влияет только на v y .
Обратите внимание, что
a x влияет только на v x , но не на v y , и
a y влияет только на v y .
При описании движения снаряда примем что нет ускорения в направлении x, в то время как ускорение в Направление y равно ускорению свободного падения:
a x = 0
a y = — g = — 9,8 м / с 2
В этом случае уравнения движения снаряда:
Траектория полета снаряда полностью определяется уравнения движения x (t) и y (t).Система координат, в которой мы будем Анализируемая траектория снаряда выбирается такой, что x 0 = y 0 = 0. В данном случае:
Время t можно исключить из этих двух уравнений:
Подставляя это выражение для t в уравнение движения для y, может быть получено следующее соотношение между x и y:
Можно сделать вывод, что траектория снаряда описывается
парабола.
Примечание: Часто полная скорость v 0 объекта на время t = 0 с и угол [theta] между направлением снаряда и положительная ось абсцисс представлена. Из этой информации компоненты скорость в момент времени t = 0 с может быть вычислена:
Рисунок 4.2. Движение снаряда.
Пример:
Предположим, что снаряд запущен с начальной скоростью v 0 и угол [theta] по отношению к оси x (см. рисунок 4.2). Каков его диапазон R ?
Начнем с определения системы координат, которая будет использоваться в этой задаче:
x (t = 0) = x 0 = 0
y (t = 0) = y 0 = 0
Положение снаряда в любой момент времени t может быть получено из следующие выражения:
При ударе y (t) = 0. Таким образом, время удара может быть получено следующим образом:
требуя, чтобы y (t) = 0 и решая для t:
Таким образом, время удара может быть получено следующим образом:
требуя, чтобы y (t) = 0 и решая для t:
Это уравнение имеет два решения:
Первое решение соответствует времени нахождения снаряда. запущен, а второе решение дает нам время попадания снаряда снова земля.Координата x в это время может быть получена с помощью подставив выражение для t в выражение для x (t):
Максимальный диапазон получается, когда sin (2 [theta]) = 1, что соответствует to [theta] = 45deg .. Скорость снаряда при ударе может быть вычислено с использованием уравнений для v x (t) и v y (t):
Сравнивая скорость при ударе со скоростью при t = 0, мы наблюдаем
что составляющая скорости, параллельная оси x, не изменилась, а
Компонент по оси Y изменил знак.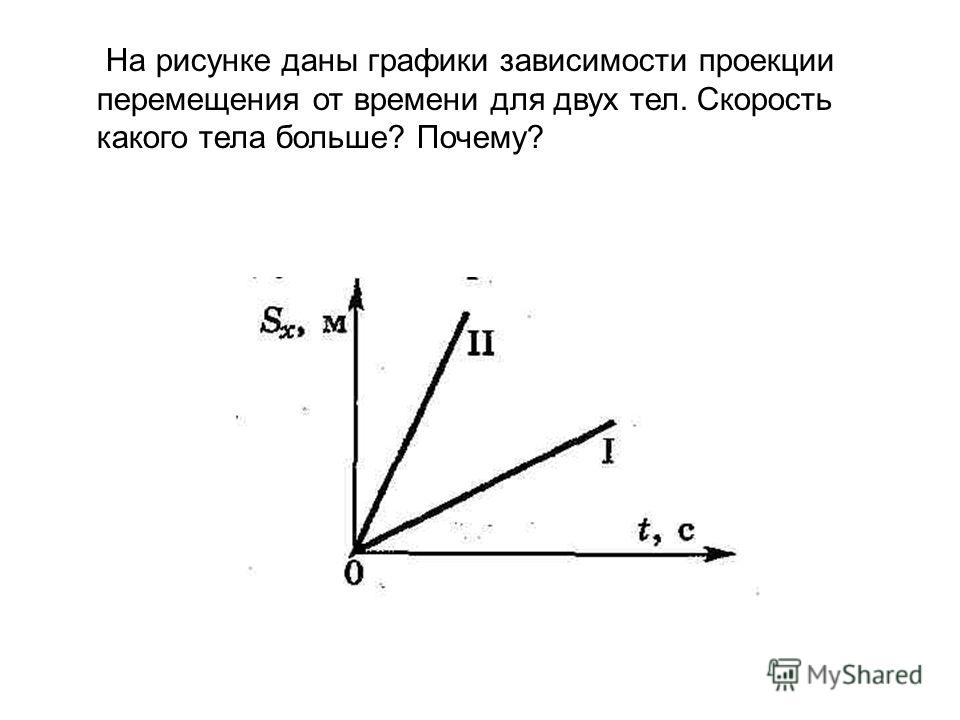
Если мы посмотрим на уравнение диапазона R, мы увидим, что для каждое значение R (менее рэнд, макс ) возможны два запуска углы: 45град. + [Дельта] [тета] и 45 град. — [Дельта] [тета] (грех (2 [тета]) — это симметрично относительно [тета] = 45 градусов). Время полета для двух случаев составляет однако по-другому: больший угол запуска соответствует большему времени полета (время полета пропорционально греху ([тета])).
Примечание : во всех наших расчетах мы пренебрегли сопротивлением воздуха.
Пример задачи 4-7
Каскадер из фильма должен пробежать по крыше, а затем по горизонтали от нее, чтобы приземлиться на крыше следующего здания (см. рис. 4-16 в Халлидея, Резнике и Уокер). Перед тем как совершить прыжок, он мудро просит вас определить, возможно. Может ли он совершить прыжок, если его максимальная скорость на крыше составляет 4,5 м / с ?
Система координат выбрана так, чтобы начало координат определялось как
положение каскадера в момент начала прыжка с крыши (это
также определяется как время t = 0). В этом случае следующие начальные условия
применить:
В этом случае следующие начальные условия
применить:
x 0 = 0 м
y 0 = 0 м
v x0 = + 4,5 м / с
v y0 = 0 м / с
a x = 0 м / с 2
a y = — g
Уравнения движения, описывающие траекторию каскадера, могут теперь можно записать как:
Время падения каскадера 4.8 м можно рассчитать из уравнения для y (t):
Расстояние по горизонтали, пройденное каскадером за это время интервал может быть рассчитан из уравнения движения для x (t):
Однако, чтобы добраться до следующего здания, каскадер должен был переехать.
6,2 м по горизонтали. Если каскадер не хочет покончить жизнь самоубийством, он должен
не прыгать.
Пример
Противотанковое орудие расположено на краю плато на высоте 60 м над уровнем моря. окружающая равнина.Расчёт орудия прицеливается к стоящему на равнине танку противника. на расстоянии 2,2 км по горизонтали от орудия. В этот же момент танк экипаж видит орудие и начинает удаляться от него с ускорением. 0,90 м / с 2 . Если противотанковое ружье стреляет снарядом с начальной скоростью 240 м / с на высоте 10 град. над горизонталью, как долго должен расчеты орудия ждут перед выстрелом, если они хотят попасть в танк.
Нашей отправной точкой являются уравнения движения оболочки.
(1)
(2)
Наша система координат определена так, что оболочка запускается при t =
0 s, а его местоположение в этот момент определяется как x = 0 m и y = h.
Следовательно, x 0 = 0 m и y 0 = h. Чтобы определить
по траектории снаряда мы сначала определяем время его полета между
запуск и удар. На этот раз t 1 можно получить из ур.(2) автор
требуя, чтобы при ударе y (t 1 ) = 0 м. Таким образом
На этот раз t 1 можно получить из ур.(2) автор
требуя, чтобы при ударе y (t 1 ) = 0 м. Таким образом
(3)
Решения для t 1 :
(4)
Поскольку после выстрела снаряд упадет в землю (при t = 0), мы нужно только рассматривать положительное решение для t 1 . Диапазон R оболочку можно получить, подставив t 1 в уравнение (1):
(5)
Проблема содержит следующую информацию о поджигании снаряд:
h = 60 м
v 0 = 240 м / с
[theta] = 10deg.
Используя эту информацию, мы можем вычислить v 0x и v 0y :
v 0x = v 0 cos ([theta]) = 236 м / с
v 0y = v 0 sin ([theta]) = 42 м / с
Подставляя эти значения в уравнение (4) и уравнение (5), получаем:
t 1 = 9,8 с
R = 2320 м
Расстояние между точкой удара и исходным положением
бак 120 м. Танк стартует из состояния покоя (v = 0 м / с) и имеет ускорение
0,9 м / с 2 . Время t 2 , необходимое танку, чтобы пройти
до точки удара можно найти, решив следующее уравнение:
Танк стартует из состояния покоя (v = 0 м / с) и имеет ускорение
0,9 м / с 2 . Время t 2 , необходимое танку, чтобы пройти
до точки удара можно найти, решив следующее уравнение:
(6)
Это показывает, что
(7)
Если снаряд выстрелил одновременно с движением танка, танк не достигнет точки удара до (16.3 — 9,8) с = 6,5 с после снаряд приземлился. Это означает, что расчету орудия необходимо выждать 6,5 с, прежде чем стрельба из противотанковых орудий, если они хотят поразить танк.
Предположим, что движение объекта как функция времени можно описать следующие отношения:
(8)
Уравнения в (8) описывают периодическое движение: положение объект в момент времени t и в момент времени t + T идентичны.Период периодического движение очевидно T. Путь этого объекта будет круговым. Это может быть легко проверяется путем расчета расстояния этого объекта до начала координат:
(9)
Ясно, что расстояние от объекта до начала координат постоянно. (независимо от времени). См. Рисунок 4.3. Скорость объекта может быть
легко вычисляется с использованием соотношений в уравнении (8):
(независимо от времени). См. Рисунок 4.3. Скорость объекта может быть
легко вычисляется с использованием соотношений в уравнении (8):
(10а)
(10б)
Направление и величина вектора скорости:
Рисунок 4.3. Определение траектории.
(11)
(12)
Рисунок 4.4. Направление скорости и ускорения.
Уравнение (11) показывает, что направление скорости равно перпендикулярно вектору положения. Очень похожим образом ускорение объекта можно вычислить:
(13а)
(13б)
Направление и величина вектора ускорения:
(14)
(15)
Уравнение (14) показывает, что направление ускорения находится в
радиальное направление (противоположное вектору положения).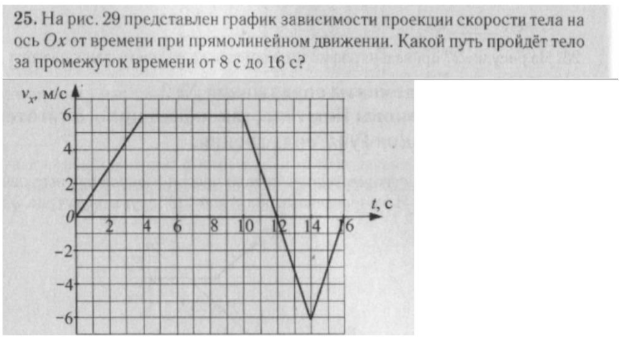 См. Также рисунок 4.4.
См. Также рисунок 4.4.
Примечание: Уравнение (12) показывает, что величина скорости объект постоянен (не зависит от времени). Уравнение (11) показывает, что только его направление меняется со временем.
Примечание: Уравнение (15) показывает, что ускорение не равно нулю. это ясно, что это ненулевое ускорение не меняет величину скорость, но он меняет свое направление. Ускорение будет ненулевым если изменяется величина или направление скорости.
Описание движения объекта зависит от движения объекта. наблюдатель. Мужчина, стоящий на шоссе, наблюдает за машинами, движущимися со скоростью +55 миль / час. Если бы наш наблюдатель ехал в одной из этих машин со скоростью +55 миль / час он видел бы другие машины, движущиеся с скорость 0 миль / час. Это показывает, что наблюдаемая скорость объект зависит от движения наблюдателя.Мы начнем наше обсуждение с относительным движением в одном измерении.
Рисунок 4. 5. Относительное движение в одном измерении.
5. Относительное движение в одном измерении.
Предположим, что движущуюся машину наблюдает наблюдатель, находящийся в начале координат. кадра A, и наблюдателем, находящимся в начале кадра B (см. рисунок 4.5). Снимок, показанный на рисунке 4.5, показывает, что в этот момент расстояние между наблюдателем A и наблюдателем B равно x BA . Позиция автомобиля, измеренного наблюдателем A, x CA , и положение автомобиля измеренные наблюдателем B, x CB , связаны следующим образом:
x CA = x BA + x CB
Если продифференцировать это уравнение по времени, то следующее Соотношение получено для скорости автомобиля, измеренной наблюдателем А и наблюдатель B:
v CA = v BA + v CB
где v CA — скорость автомобиля, измеренная наблюдателем A,
v CB — скорость автомобиля, измеренная наблюдателем B, и
v BA — скорость наблюдателя B, измеренная наблюдателем A. Если
наблюдатель A и наблюдатель B не двигаются относительно друг друга
(v BA = 0 м / с), скорость автомобиля, измеренная наблюдателем A, равна
равна скорости автомобиля, измеренной наблюдателем Б.
Если
наблюдатель A и наблюдатель B не двигаются относительно друг друга
(v BA = 0 м / с), скорость автомобиля, измеренная наблюдателем A, равна
равна скорости автомобиля, измеренной наблюдателем Б.
Аналогичным образом можно получить связь между ускорение автомобиля, измеренное наблюдателем А, и ускорение, измеренное наблюдатель B:
a CA = a BA + a CB
Если наблюдатель в кадре B движется с постоянной скоростью с относительно наблюдателя в кадре A (v BA = постоянная и a BA = 0 м / с 2 ), ускорение, измеренное в кадре A, равно равно ускорению, измеренному в кадре B:
a CA = a CB
Пример задачи 4-12
Алекс, припаркованный на обочине дороги с востока на запад, наблюдает за автомобилем P,
который движется в западном направлении.Барбара едет на восток со скоростью
в ВА = 52 км / ч, смотрит такая же машина.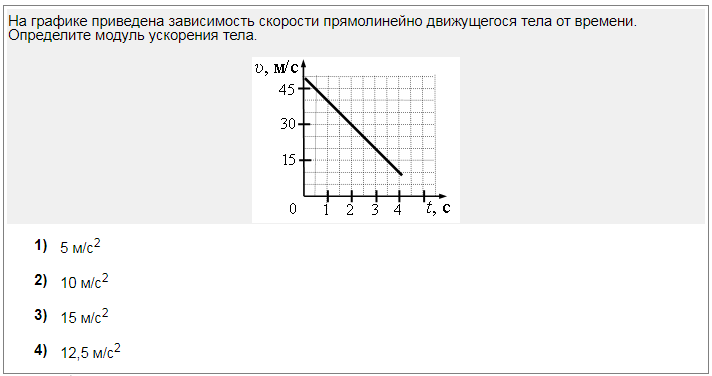 Двигайтесь в восточном направлении как
положительный.
Двигайтесь в восточном направлении как
положительный.
а) Если Алекс измеряет скорость 78 км / ч для автомобиля P, какая скорость будет у Барбары? измерить?
В этой проблеме участвуют три машины, которые находятся где-то на шоссе. бежит с востока на запад. Наша система координат выбрана такой, что положительная скорость соответствует движению на восток, а отрицательная скорость соответствует движению на запад.Алекс сидит в машине припаркован на обочине шоссе (кадр A), и Барбара едет на восток с скорость v BA (измерена Алексом), равная +52 км / ч. Оба наблюдают автомобиль P. Скорость P, V PA (замер Алексей) — 78 км / ч. (см. рисунок 4.6). Скорость автомобиля P, измеренную Барбарой, можно вычислить следующим образом:
v PA = v BA + v PB
v PA = — 78 км / ч
v BA = 52 км / ч
v PB = v PA — v BA = (- 78 — 52) км / ч = — 130 км / ч
Скорость Алекса, измеренную Барбарой, можно рассчитать аналогичным образом. образом, а результирующая скорость — 52 км / ч.Соответствующая скорость
диаграмма представлена на рисунке 4.7.
образом, а результирующая скорость — 52 км / ч.Соответствующая скорость
диаграмма представлена на рисунке 4.7.
Рисунок 4.6. Диаграмма скоростей, измеренная относительно Alex.
Рисунок 4.7. Диаграмма скоростей, измеренная относительно Барбары.
б) Если ALEX видит, что автомобиль P останавливается через 10 с, какое ускорение? (предполагаемая константа) будет ли он ее измерять?
Алекс замечает, что машина P останавливается через 10 с. Алекс может рассчитать ускорение автомобиля P:
v (t) = v 0 + a t
Начальные условия:
v 0 = v (t = 0) = — 78 км / ч = — 21.7 м / с
Конечные условия:
v (t = 10 с) = 0 м / с
Предполагая постоянное ускорение, a можно рассчитать следующим образом:
в) Какое ускорение Барбара измерила бы тормозящей машине?
Барбара также заметила, что автомобиль P замедляется в течение этого 10-секундного интервала. В момент времени t = 0 она наблюдает, как автомобиль P движется со скоростью, равной v 0 = — 130 км / ч (- 36,1 м / с).Через 10 с она наблюдает, как машина P движется с
скорость равна v (t = 10 с) = — 52 км / ч (- 14,4 м / с). Барбара также может
рассчитать ускорение автомобиля P:
В момент времени t = 0 она наблюдает, как автомобиль P движется со скоростью, равной v 0 = — 130 км / ч (- 36,1 м / с).Через 10 с она наблюдает, как машина P движется с
скорость равна v (t = 10 с) = — 52 км / ч (- 14,4 м / с). Барбара также может
рассчитать ускорение автомобиля P:
И Алекс, и Барбара измеряют одинаковое ускорение автомобиля P. Это чего мы ожидали, поскольку Барбара движется с постоянным ускорением относительно к Алексу.
Описание движения объекта в двух или трех измерениях зависит от о выборе системы координат.На рисунке 4.8 показаны две системы отсчета. в двух измерениях. Векторы r PA и r PB являются векторы положения объекта Р в системе отсчета А и в качестве ссылки кадр B соответственно. Вектор r BA — позиция наблюдатель B (расположенный в начале системы отсчета B) в кадре A. вектор положения объекта P в системе отсчета B может быть получен из вектор положения в системе отсчета A:
Рисунок 4.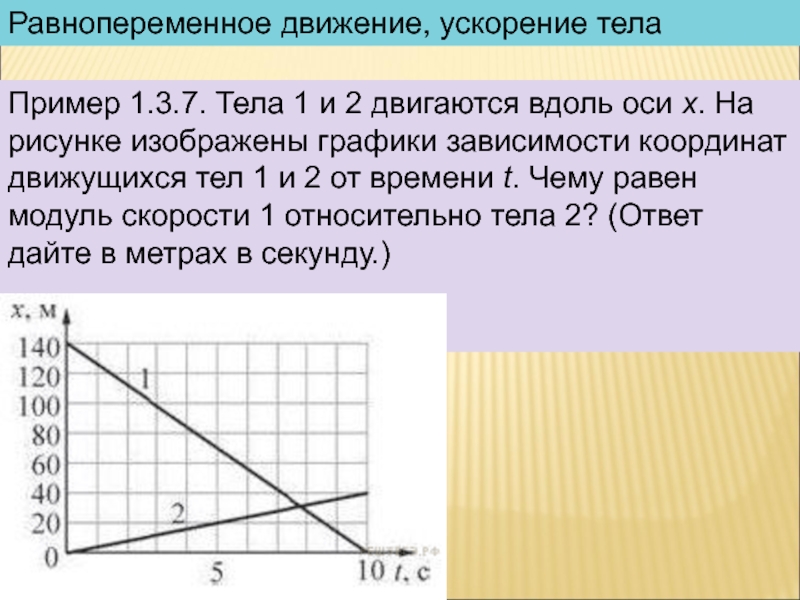 8. Системы отсчета в двух измерениях.
8. Системы отсчета в двух измерениях.
Скорость и ускорение объекта P в системе отсчета B могут быть полученным путем дифференцирования вектора положения P в системе отсчета B по времени:
Если наблюдатель в системе отсчета B движется с постоянной скоростью относительно наблюдателя в системе отсчета A, ускорение объект P, измеренный наблюдателем A, будет таким же, как измеренное ускорение наблюдателем Б.
Отправляйте комментарии, вопросы и / или предложения по электронной почте на адрес [email protected] и / или посетите домашнюю страницу Фрэнка Вольфса.
Объемная волна — обзор
1.25.4.2 Одномерная мантия на основе объемных волн
Q МоделиИсследования объемных волн обычно выводят структуру Q на основе измерения t * («t-звезда»), который определяется следующим образом:
[5] t * = ∫dsQv
, где интеграл берется вдоль траектории объемной волны, а v — скорость волны. См. Раздел 1.25.6.2 для получения более подробной информации о том, как измеряется t *.
См. Раздел 1.25.6.2 для получения более подробной информации о том, как измеряется t *.
Почти вертикально бегущие множественные ScS-волны обеспечили ранние ограничения в среднем Q μ во всей мантии (например, Kovach and Anderson, 1964; Yoshida and Tsujiura, 1975) и подтвердили увеличение в Q μ в средней мантии. Исследования соотношений амплитуд фаз объемных волн, взаимодействующих с границей ядро-мантия (CMB), предоставили ранние доказательства возможной нижней зоны Q μ в основании мантии (т.е.г., Кустер, 1972; Митчелл и Хелмбергер, 1973).
Совсем недавно Lawrence и Wysession (2006a) разработали модель Q μ , основанную на большом глобальном наборе данных дифференциальных измерений амплитуды ScS / S, используя генетический алгоритм niching для согласования вариаций этих амплитуд с расстоянием. Из-за характера их данных их модель (QLM9, , рис. 4 ) лучше всего ограничивается нижней мантией, поэтому они решили привязать верхние 400 км мантии к значению PREM.Полученная модель также свидетельствует о существовании максимума Q μ в нижней мантии, в данном случае прямо над областью D ″. Однако высокие значения Q , которые они получают в переходной зоне, несовместимы с сфероидальными и тороидальными данными основной моды ( Рисунок 3 (a) ). Замена их верхней мантии на мантию QL6 решает эту проблему (, рис. 3 (b) ), и требуется небольшая корректировка нижней мантии, чтобы соответствовать данным амплитуды ScS / S (Лоуренс, личное сообщение).
4 ) лучше всего ограничивается нижней мантией, поэтому они решили привязать верхние 400 км мантии к значению PREM.Полученная модель также свидетельствует о существовании максимума Q μ в нижней мантии, в данном случае прямо над областью D ″. Однако высокие значения Q , которые они получают в переходной зоне, несовместимы с сфероидальными и тороидальными данными основной моды ( Рисунок 3 (a) ). Замена их верхней мантии на мантию QL6 решает эту проблему (, рис. 3 (b) ), и требуется небольшая корректировка нижней мантии, чтобы соответствовать данным амплитуды ScS / S (Лоуренс, личное сообщение).
Совсем недавно Durand et al. (2013) применили метод, основанный на мгновенных измерениях частоты (Ford et al., 2012; Gao et al., 2011), чтобы получить дифференциальные оценки t * S – ScS в северо-восточной части Тихого океана и в Центральной Америке со строгим выбор качества данных. Эти авторы делают вывод о профиле мантии 1D Q μ , который в целом хорошо согласуется с QLM9 (, рис. 4, ). Они предполагают, что различия могут быть объяснены небольшой частотной зависимостью с α ~ 0.1.
4, ). Они предполагают, что различия могут быть объяснены небольшой частотной зависимостью с α ~ 0.1.
Типичный частотный диапазон исследований на основе ScS и множественных ScS составляет около 0,02–0,2 Гц. Более высокочастотные исследования основывались на комбинации волн P и S или волн P и PP. Уоррен и Ширер (2000) вывели серию одномерных глобальных моделей Q α из суммированных спектров P- и PP-волн в полосе частот 0,16–0,86 Гц. Хотя частотная зависимость не может быть проигнорирована в этой полосе частот, как обсуждается далее в следующем тексте, при допущении отсутствия частотной зависимости эти авторы обнаруживают, что верхняя мантия в пять раз более ослабляющая, чем нижняя мантия.
Недавно Оки и Ширер (2008) построили двухслойную модель 1D Q μ для короткопериодических объемных волн (3–10 с), используя большой набор данных измерений телесейсмических P- и S-волн от широкополосные сейсмограммы и извлечение дифференциальных t * S – P измерений.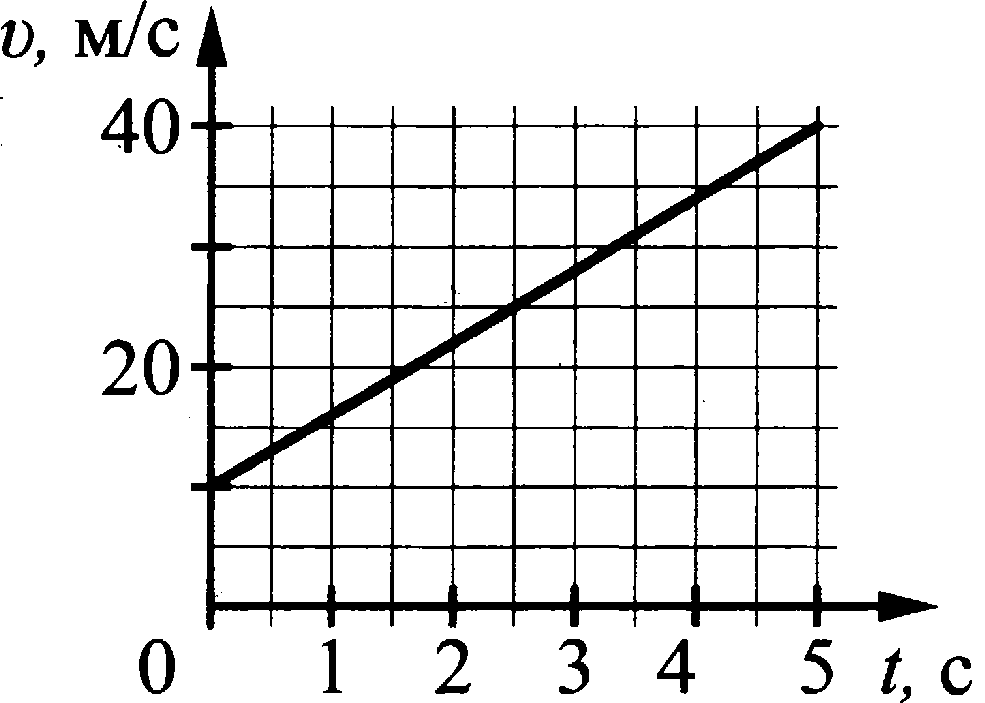 Они получили аналогичное среднее значение Q μ в верхней мантии, полученное из длиннопериодических измерений поверхностных волн / мод, но более высокое значение Q μ (в 2 раза) в нижней мантии, что, по их мнению, составляет указывают на более сильную частотную зависимость Q μ в нижней мантии.Хванг и Ритсема (2011) пересмотрели этот вопрос с помощью на порядок большего набора данных и подтвердили больший Q μ в нижней мантии. Предлагаемая ими модель (модель HR11, , рис. 4 ), которая имеет фиксированный профиль верхней мантии Q μ , равный профилю PREM (Dziewonski and Anderson, 1981), имеет увеличивающийся Q μ с 360 °. верхней части нижней мантии до 670 в самой нижней мантии. Авторы отмечают, что эта разница с глубиной так же велика, как латеральные различия в Q μ между тектоническими и стабильными областями континентов.
Они получили аналогичное среднее значение Q μ в верхней мантии, полученное из длиннопериодических измерений поверхностных волн / мод, но более высокое значение Q μ (в 2 раза) в нижней мантии, что, по их мнению, составляет указывают на более сильную частотную зависимость Q μ в нижней мантии.Хванг и Ритсема (2011) пересмотрели этот вопрос с помощью на порядок большего набора данных и подтвердили больший Q μ в нижней мантии. Предлагаемая ими модель (модель HR11, , рис. 4 ), которая имеет фиксированный профиль верхней мантии Q μ , равный профилю PREM (Dziewonski and Anderson, 1981), имеет увеличивающийся Q μ с 360 °. верхней части нижней мантии до 670 в самой нижней мантии. Авторы отмечают, что эта разница с глубиной так же велика, как латеральные различия в Q μ между тектоническими и стабильными областями континентов.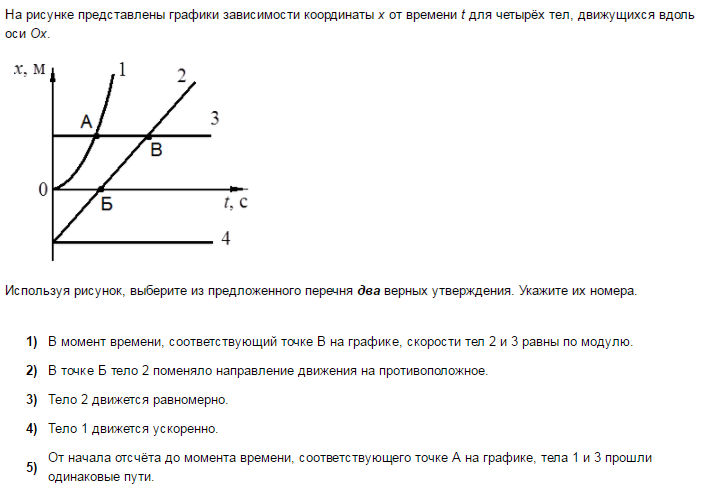 Детали структуры нижней мантии могут измениться, если будет использоваться модель верхней мантии QL6 (Durek and Ekström, 1996), а не PREM, что было бы уместно для соответствия долгопериодическим поверхностным волнам. Однако общая тенденция увеличения Q μ с глубиной в нижней мантии, которая является наиболее устойчивой особенностью модели HR11, не изменится.
Детали структуры нижней мантии могут измениться, если будет использоваться модель верхней мантии QL6 (Durek and Ekström, 1996), а не PREM, что было бы уместно для соответствия долгопериодическим поверхностным волнам. Однако общая тенденция увеличения Q μ с глубиной в нижней мантии, которая является наиболее устойчивой особенностью модели HR11, не изменится.
Очевидно, что большие различия между значениями Q , полученными на основе объемных волн, особенно тех, которые включают в анализ P-волны, и низкочастотных поверхностных волн и свободных колебаний, указывают на частотно-зависимый эффект.Причем этот эффект может быть разным в верхней и нижней мантии. Для учета наблюдений как нормальной моды, так и объемных волн, Андерсон и Харт (1976, 1978) предложили модель с максимумом Q μ в нижней мантии, особенностью, которая последовательно появлялась и исчезала в последующих моделях всей мантии, основанных на по нормальным модам и данным о поверхностных волнах (Giardini, Woodhouse, 1988; Li, 1990; Masters and Gilbert, 1983; Okal, Jo, 2002; Smith and Masters, 1989; Widmer et al.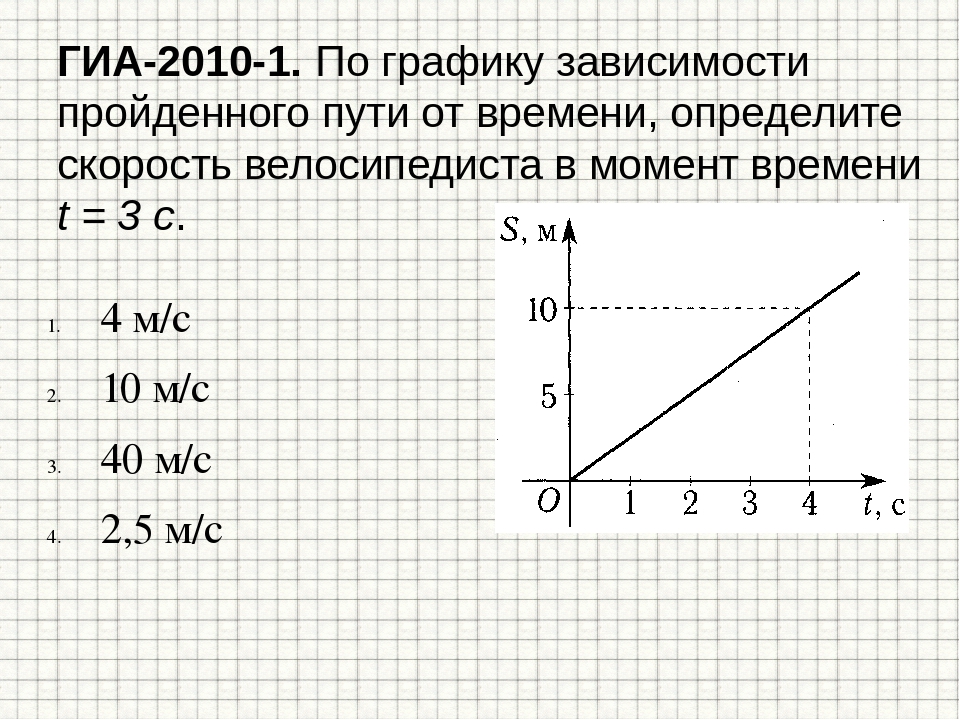 , 1991). Андерсон и Гивен (1982) предположили, что полоса поглощения смещена в сторону более низких частот в нижней мантии по сравнению с верхней мантией, что приводит к более выраженной частотной зависимости в нижней мантии. Это согласуется с результатами Oki and Shearer (2008). В среднем, большие различия между значениями Q нижней мантии, полученными из низкочастотных и высокочастотных данных, могут быть согласованы с частотной зависимостью с α ~ 0,1, как также было отмечено Lekic et al.(2009) ( Рисунок 2 ).
, 1991). Андерсон и Гивен (1982) предположили, что полоса поглощения смещена в сторону более низких частот в нижней мантии по сравнению с верхней мантией, что приводит к более выраженной частотной зависимости в нижней мантии. Это согласуется с результатами Oki and Shearer (2008). В среднем, большие различия между значениями Q нижней мантии, полученными из низкочастотных и высокочастотных данных, могут быть согласованы с частотной зависимостью с α ~ 0,1, как также было отмечено Lekic et al.(2009) ( Рисунок 2 ).
В этих исследованиях объемных волн обычно предполагается, что объемным затуханием ( Q κ — 1 ) можно пренебречь. Используя соотношение между Q α , Q β и Q κ (Андерсон и Харт, 1978)
[6] Qα − 1 = 43VS / VP2Qβ − 1 + 1−43VS / VP2Qκ − 1
это приводит к обычно используемому преобразованию между Q α и Q β , предполагая твердое тело Пуассона (VS = 3VP):
Qα = 94Qβ
Однако некоторые региональные исследования в зонах субдукции предполагают, что объемное ослабление может достигать 1/3 ослабления при сдвиге (например,г.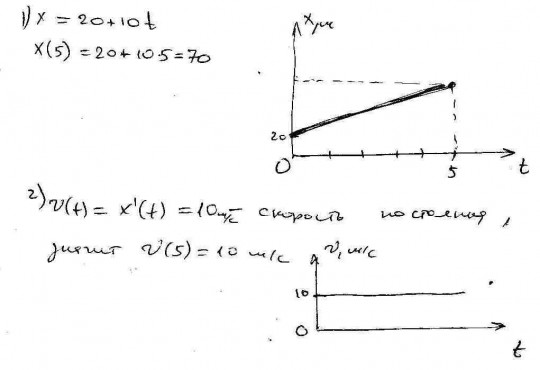 , Roth et al., 1999).
, Roth et al., 1999).
Объемное затухание необходимо для одновременного согласования данных радиальных мод с высоким значением Q и данных о поверхностных волнах, а некоторые модели, такие как SL8 (Андерсон и Харт, 1978) и широко используемый PREM (Дзевонски и Андерсон, 1981), определяют его местонахождение. во внутреннем ядре, в то время как другие предпочитают размещать его в верхней мантии (например, Sailor and Dziewonski, 1978), во внешнем ядре (Anderson, Given, 1982; Widmer et al., 1991), а в последнее время — в астеносфера (Durek, Ekström, 1995).Ресовский и др. (2005) также пересмотрели этот вопрос и обнаружили, что объемное затухание пренебрежимо мало во внутреннем ядре и предпочтительно расположено во внешнем ядре и нижней мантии. Вопрос о местонахождении объемного затухания на Земле не решен.
Новые ограничения на среднее сдвиговое и объемное затухание в Земле и ядре и их частотная зависимость, на основе комбинации анализа объемной волны и нормального режима, могут появиться в ближайшее время благодаря высококачественному набору цифровых данных, собранных в последнем 20 лет в глобальной широкополосной сейсмической сети в связи с возникновением нескольких очень сильных землетрясений, особенно сильных землетрясений, таких как на Суматре 26 декабря 2004 г.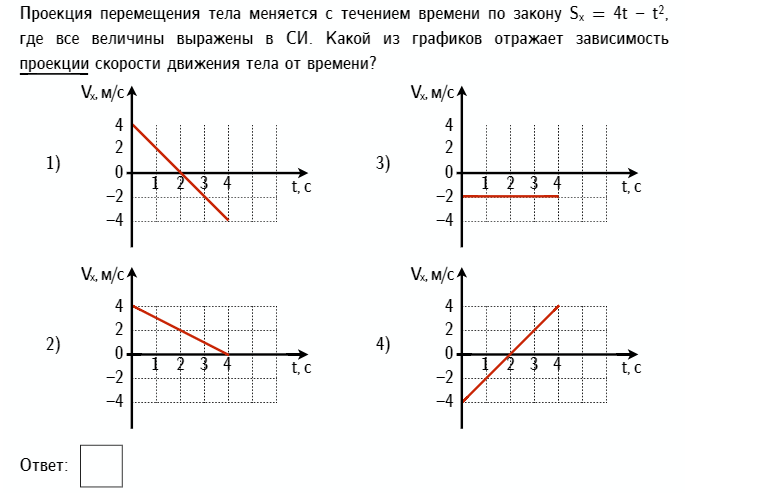 и в Тохоку (Япония) 12 марта 2010 г.В частности, эти данные дают возможность вернуться к Q с самых тяжелых мод Земли, в частности радиальной моды 0 S 0 , и впервые измерить Q отдельных синглетов мод, таких как 0 S 2 или 2 S 1 (например, Rosat et al., 2005; Roult et al., 2006).
и в Тохоку (Япония) 12 марта 2010 г.В частности, эти данные дают возможность вернуться к Q с самых тяжелых мод Земли, в частности радиальной моды 0 S 0 , и впервые измерить Q отдельных синглетов мод, таких как 0 S 2 или 2 S 1 (например, Rosat et al., 2005; Roult et al., 2006).
% PDF-1.4
%
102 0 объект>
endobj
xref
102 78
0000000016 00000 н.
0000003339 00000 н.
0000001856 00000 н.
0000003421 00000 н.
0000003610 00000 н.
0000003885 00000 н.
0000004340 00000 н.
0000004566 00000 н.
0000004809 00000 н.
0000004886 00000 н.
0000005118 00000 п.
0000005427 00000 н.
0000005635 00000 н.
0000005765 00000 н.
0000006138 00000 п.
0000006679 00000 н.
0000006810 00000 н.
0000007596 00000 н.
0000008117 00000 н.
0000008447 00000 н.
0000008694 00000 п.
0000008924 00000 н.
0000009055 00000 н.
0000009411 00000 н.
0000009641 00000 п. 0000009870 00000 н.
0000010674 00000 п.
0000010804 00000 п.
0000011101 00000 п.
0000011639 00000 п.
0000011801 00000 п.
0000012044 00000 п.
0000012879 00000 п.
0000013616 00000 п.
0000013934 00000 п.
0000014064 00000 п.
0000014193 00000 п.
0000014731 00000 п.
0000014963 00000 п.
0000015331 00000 п.
0000015460 00000 п.
0000015590 00000 п.
0000015945 00000 п.
0000016243 00000 п.
0000016978 00000 п.
0000017688 00000 п.
0000019505 00000 п.
0000032401 00000 п.
0000038683 00000 п.
0000038919 00000 п.
0000039214 00000 п.
0000046541 00000 п.
0000048188 00000 п.
0000048415 00000 н.
0000048603 00000 п.
0000050612 00000 п.
0000050854 00000 п.
0000051036 00000 п.
0000057673 00000 п.
0000061271 00000 п.
0000061496 00000 п.
0000063818 00000 п.
0000063999 00000 н.
0000066155 00000 п.
0000071489 00000 п.
0000083416 00000 п.
0000083612 00000 п.
0000083840 00000 п.
0000086232 00000 п.
0000086475 00000 п.
0000089209 00000 п.
0000089659 00000 п.
0000089878 00000 п.
0000009870 00000 н.
0000010674 00000 п.
0000010804 00000 п.
0000011101 00000 п.
0000011639 00000 п.
0000011801 00000 п.
0000012044 00000 п.
0000012879 00000 п.
0000013616 00000 п.
0000013934 00000 п.
0000014064 00000 п.
0000014193 00000 п.
0000014731 00000 п.
0000014963 00000 п.
0000015331 00000 п.
0000015460 00000 п.
0000015590 00000 п.
0000015945 00000 п.
0000016243 00000 п.
0000016978 00000 п.
0000017688 00000 п.
0000019505 00000 п.
0000032401 00000 п.
0000038683 00000 п.
0000038919 00000 п.
0000039214 00000 п.
0000046541 00000 п.
0000048188 00000 п.
0000048415 00000 н.
0000048603 00000 п.
0000050612 00000 п.
0000050854 00000 п.
0000051036 00000 п.
0000057673 00000 п.
0000061271 00000 п.
0000061496 00000 п.
0000063818 00000 п.
0000063999 00000 н.
0000066155 00000 п.
0000071489 00000 п.
0000083416 00000 п.
0000083612 00000 п.
0000083840 00000 п.
0000086232 00000 п.
0000086475 00000 п.
0000089209 00000 п.
0000089659 00000 п.
0000089878 00000 п. 0 & S6,2Н # v ۭ Wξ ߮ ڍ YNe = c CP & aCS3
0 & S6,2Н # v ۭ Wξ ߮ ڍ YNe = c CP & aCS3
Теория относительности — Математическая энциклопедия
Физическая теория, изучающая пространственно-временные свойства физических процессы.Эти свойства являются общими для всех физических процессов и часто называются просто пространственно-временными свойствами. Свойства пространства-времени зависят от гравитационных полей, действующих в данной области. Свойства пространства-времени в присутствии гравитационного поля изучаются в общей теории относительности, которую также называют теорией гравитации. В специальной теории относительности свойства пространства-времени изучаются в приближении, в котором эффекты, связанные с гравитацией, можно не учитывать. Специальная теория относительности излагается ниже; по общей теории относительности см. Гравитация, теория.{2} $,
которая называется энергией покоя. В ядерных реакциях и процессах, трансформирующих элементарные частицы, энергия покоя исходных частиц может быть преобразована (частично или полностью) в кинетическую энергию конечных частиц. Из формулы (1) следует, что энергия тел ненулевой массы стремится к бесконечности при $ v \ rightarrow c $.
Если $ m \ neq 0 $,
скорость тела всегда меньше $ c $.
Частицы с $ m = 0 $ (
фотоны и нейтрино) всегда движутся со скоростью света.{2}.
$$
Из формулы (1) следует, что энергия тел ненулевой массы стремится к бесконечности при $ v \ rightarrow c $.
Если $ m \ neq 0 $,
скорость тела всегда меньше $ c $.
Частицы с $ m = 0 $ (
фотоны и нейтрино) всегда движутся со скоростью света.{2}.
$$
Скорость света в вакууме в теории относительности — это предельная скорость, то есть передача взаимодействий и сигналов от одной точки к другой происходит со скоростью, не превышающей ее.
Существование предельной скорости несовместимо с концепциями классической кинематики и требует фундаментальной реконструкции классических концепций пространства-времени.
Принцип относительности Эйнштейна и другие принципы инвариантности.
Принцип относительности является фундаментальным в теории относительности; он утверждает, что любой физический процесс протекает идентично (при идентичных начальных условиях) в изолированной материальной системе, которая находится в состоянии покоя относительно произвольно выбранной инерциальной системы, и в другой системе отсчета, которая находится в состоянии равномерного и прямолинейного движения относительно к первой инерциальной системе отсчета.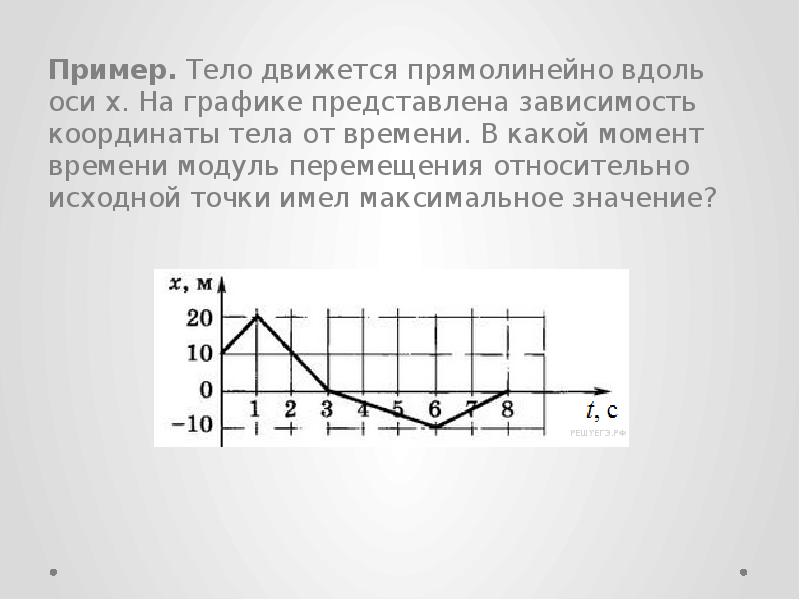
Принцип относительности означает, что различие между разными инерциальными системами отсчета не может быть проведено на основе одного только физического эксперимента. Подвижная система отсчета получается из системы отсчета, которая считается неподвижной, посредством преобразования координат. Из принципа относительности следует, что физические законы инвариантны относительно этих преобразований координат и принимают одинаковую форму во всех инерциальных системах отсчета.
Помимо преобразований в движущиеся системы отсчета, известны три других типа преобразований, не изменяющих ход физических процессов: перемещение (сдвиг) в пространстве, вращение в пространстве и перенос (сдвиг) во времени.Симметрии физических законов относительно этих преобразований точно выполняются только в изолированных системах и соответствуют законам сохранения импульса, момента количества движения и энергии.
Инерциальные системы отсчета и преобразования Лоренца.
Инерциальные системы отсчета в теории относительности образуют отдельный класс систем отсчета, в которых эффекты теории относительности имеют самое простое описание.
Основными понятиями теории относительности являются концепции точечного события и светового сигнала.В данной инерциальной системе отсчета точечное событие может быть охарактеризовано тремя пространственными координатами $ x, y, z $ в декартовой системе координат и по временной координате $ t $. Системы координат $ x, y, z, t $ в различных инерциальных системах отсчета связаны преобразованиями Лоренца (см. преобразование Лоренца). Вид преобразований Лоренца может быть получен из принципа относительности, условий симметрии и требования, чтобы вышеупомянутые преобразования образовывали группу.{2}}} . \ end {массив} \правильно \} $$
Чтобы представить все преобразования Лоренца в форме (3), необходимо соединить пространственные повороты вокруг начала координат. Преобразования Лоренца образуют группу, называемую группой Лоренца. Свойство инвариантности физических законов относительно преобразований Лоренца называется лоренц-инвариантностью или релятивистской инвариантностью. {2}}
} \ neq 0.\ прайм = т.
$$
{2}}
} \ neq 0.\ прайм = т.
$$
Эти преобразования соответствуют повседневному опыту, в котором движения тел с релятивистскими скоростями не встречаются. В частности, преобразования Галилея сохраняют пространственные размеры тел и продолжительность физических процессов. Преобразования (5) и их различные комбинации с вращениями в пространстве образуют так называемую группу Галилея. Основное отличие преобразований Лоренца от преобразований Галилея состоит в том, что в преобразованиях Лоренца пространственная координата $ x $
входит в формулу преобразования временной координаты $ t $.Таким образом, видоизменяются концепции пространства и времени, и пространственные и временные свойства физических процессов не могут рассматриваться отдельно друг от друга. Это привело к возникновению концепции пространства-времени, то есть объекта, геометрические свойства которого определяют как пространственные, так и временные свойства физических процессов. В классической ньютоновой механике пространственные свойства физических процессов определяются геометрическими свойствами трехмерного евклидова пространства, а временная переменная появляется в уравнениях как параметр. {4} $,
называемое пространством Минковского, является адекватной моделью пространства-времени. Создание концепции пространства-времени открыло путь для геометризации аппарата теории относительности, которая оказалась решающей для развития общей теории относительности.
{4} $,
называемое пространством Минковского, является адекватной моделью пространства-времени. Создание концепции пространства-времени открыло путь для геометризации аппарата теории относительности, которая оказалась решающей для развития общей теории относительности.
Математический аппарат теории относительности и геометрия пространства Минковского.
В аксиоматическом описании теории относительности аксиомы, которые фиксируют свойства основных понятий теории относительности (точечное событие и световой сигнал), могут быть извлечены из неформального описания основных положений, приведенных выше.Эта система аксиом дополняется аксиомами, естественными с физической точки зрения и гарантирующими существование достаточно большого количества событий и световых сигналов, а также некоторыми аксиомами непрерывности на множестве световых сигналов и точечных событий. . Другими словами, эти аксиомы гарантируют, что каждый набор чисел $ (t, x, y, z) $ определяет точечное событие. После этого расширения система аксиом теории относительности оказывается эквивалентной системе аксиом пространства Минковского.Таким образом, пространство Минковского служит пространственно-временной моделью специальной теории относительности. Точечное событие интерпретируется в этой модели пространства-времени как точка в пространстве Минковского, чьи точки поэтому называются мировыми точками. Каждая система координат $ (t, x, y, z) $ в пространстве Минковского определяет инерциальную систему отсчета, и поэтому системы координат в теории относительности сами называются системами Галилея. Самолет $ t = \ textrm {const} $ в пространстве Минковского называется пространственным сечением, соответствующим данной системе координат.{2} = 0 $ называются светоподобными или изотропными. Если в пространстве Минковского выделить некоторую точку (например, начало координат), то пространство можно разбить на три области. Две из них, состоящие из точек, соединенных с нулем временными векторами, называются областями абсолютного будущего и абсолютного прошлого. \ prime $ чем событие 0.Область, точки которой $ A $ соединены с точкой 0 пространственноподобными векторами, называемыми областью абсолюта в другом месте. Эта область характеризуется тем, что не существует преобразования Лоренца, при котором точки $ A $ и 0 будут иметь одинаковые пространственные координаты. Точки на границе этих областей образуют световой конус точки 0. Точки этого конуса соединены с нулем нулевыми векторами. Пространственно-временная история каждой точечной частицы (материальной точки) соответствует определенной линии в пространстве Минковского, называемой мировой линией этой частицы.Точки этой линии определяют координаты частицы в любой момент времени. Тот факт, что скорости всех частиц не превышают $ c $ означает, что (в предположении естественной гладкости) все касательные векторы к мировой линии либо времениподобны, либо изотропны. Первый соответствует частицам с ненулевой массой покоя, второй — частицам с нулевой массой покоя. Естественный параметр на мировой линии массивной частицы называется собственным временем частицы. Физический смысл собственного времени состоит в том, что это время, отсчитываемое часами, движущимися вместе с частицей.
Выражением закона инерции в этой модели является тот факт, что свободные частицы, т.е. те, которые не подвержены действию сил, имеют временноподобные или изотропные прямые (т.е. геодезические) пространства Минковского в качестве мировых линий. . В частности, частицы с нулевой массой покоя имеют мировые линии, расположенные на световом конусе. В общей теории относительности одним из выражений закона инерции является так называемая геодезическая гипотеза, согласно которой частица, не подверженная действию других сил, кроме силы тяжести, движется по геодезической соответствующего пространства. -время.Световой сигнал, который присоединяется к данным точечным событиям, интерпретируется в этой модели как отрезок изотропной геодезической, соединяющий соответствующие мировые точки.
Временная геодезическая в пространстве Минковского, соединяющая две заданные мировые точки $ A $ и $ B $ — самая длинная кривая среди всех мировых линий времени, соединяющих эти две точки. Это следует из неравенства обратного треугольника, согласно которому временноподобная ломаная, соединяющая две точки, короче единственной временной геодезической, соединяющей их.С точки зрения теории относительности, максимальная длина времяподобной геодезической означает, что собственное время частицы, свободно движущейся из мировой точки $ A $ в мировую точку $ B $ больше, чем собственное время любой другой частицы, мировая линия которой соединяет эти мировые точки. Этот факт принято называть парадоксом близнецов.
Как правило, при построении тензоров, выражающих физические величины, несколько соответствующих тензорных объектов классической физики объединяются в один тензорный объект в пространстве Минковского.Например, вектор энергии-импульса формируется следующим образом: его первой составляющей в галилеевой системе координат является значение $ E / c $, в то время как остальные три являются компонентами вектора импульса (это обозначается как $ (E / c, \ mathbf p) $). Чтобы отличить тензоры пространства Минковского от тензоров на его пространственных сечениях, которые изучались в классической физике, обычно говорят о четырехмерных тензорах, или $ 4 $ — тензоры. {2}}}} \правильно ) ,\ \ я = 0, 1, 2, 3, $$
назвал $ 4 $ — скорость.{i}} {ds} . $$
Роль теории относительности в современной физике.
Теория в значительной степени подтверждена фактами, и она составляет основу всех современных теорий, изучающих явления с релятивистскими скоростями. Развитие теории электромагнетизма, основанной на классической электродинамике, возможно только через теорию относительности (исторически анализ основ классической электродинамики, и в частности оптики движущихся тел, привел к построению теории относительности).Теория относительности составляет основу квантовой электродинамики и теорий сильного и слабого взаимодействия элементарных частиц. Квантовые законы движения и трансмутации элементарных частиц изучаются в релятивистской квантовой теории поля.
Список литературы
| [1] | А. Эйнштейн, «Elektrodynamik bewegter Körper» Ann. der Phys. , 17 (1905) стр. 891–921 |
| [2] | А. Эйнштейн, Л.Инфельд, «Эволюция физики», Simon & Schuster (1962) |
| [3] | Х. Минковский, «Raum und Zeit» Phys. З. , 10 (1909) с. 104–111 |
| [4] | Е.М. Ливщиц, «Классическая теория полей», Пергамон (1975) |
| [5 ] | Р.П. Фейнман, Р. Б. Лейтон, М. Сэндс, «Лекции Фейнмана по физике», 2 , Аддисон-Уэсли (1965) |
| [6] | W.Паули, «Relativitätstheorie», Teubner (1921) |
| [7] | J.L. Synge, «Относительность: общая теория», Северная Голландия (1960) |
| [8] | R.C. Толмен, «Относительность, термодинамика и космология», Clarendon Press (1934) |
| [9] | P.K. [П.К. Рашевский] Рашевский, «Riemannsche Geometrie und Tensoranalyse», Deutsch. Verlag Wissenschaft. (1959) |
Список литературы
| [a1] | V.А. [В.А. Фок] Фок, «Теория пространства, времени и гравитации», Макмиллан (1954) |
| [a2] | Х. Вейль, «Raum, Zeit, Materie», Springer (1923) |
| [a3] | Р. Пенроуз, «Структура пространства-времени» CM ДеВитт (ред.) Дж. А. Уиллер (ред.), Batelle Rencontres 1967 Лекции по математике. Physics , Benjamin (1968) pp. 121–235 (Глава VII) |
| [a4] | J.A. Schouten, «Тензорный анализ для физиков», Cambridge Univ. Press (1951) |
| [a5] | Л.П. Эйзенхарт, «Риманова геометрия», Princeton Univ. Press (1949) |
| [a6] | J.L. Synge, A. Schild, «Тензорное исчисление», Toronto Univ. Пресс (1959) |
| [a7] | R.K. Сакс, Х. Ву, «Общая теория относительности для математиков», Springer (1977) |
| [a8] | D.Ф. Лоуден, «Введение в тензорное исчисление и относительность», Метуэн (1962) |
| [a9] | A.S. Эддингтон, «Математическая теория относительности», Cambridge Univ. Press (1960) |
| [a10] | A. Эйнштейн и др., «Принцип относительности. Сборник оригинальных статей», Dover, перепечатка (1952) |
| [a11] | A Эйнштейн, «Смысл теории относительности», Princeton Univ. Press (1956) |
Как процитировать эту запись:
Теория относительности. Энциклопедия математики. URL: http://encyclopediaofmath.org/index.
Leave A Comment