
Задачи для самостоятельного решения 4 — Механические колебания, волны — ПРИМЕРЫ РЕШЕНИЯ ЗАДАЧ. ОТРАБОТКА ТЕМАТИЧЕСКОГО МАТЕРИАЛА — ЕГЭ 2018. Тренажёр: Физика. — ЕГЭ 2018 — Справочное издание
ЕГЭ 2018. Тренажёр: Физика
Механические колебания, волны
Задачи для самостоятельного решения
1. В первой серии опытов исследовались малые колебания груза на нити некоторой длины. Затем этот же груз закрепили на нити большей длины. Максимальные углы отклонения нити от вертикали в опытах одинаковые.
Как при переходе от первой серии опытов ко второй изменятся период колебаний и амплитуда колебаний груза?
Для каждой величины определите соответствующий характер изменения:
1) увеличится
2) уменьшится
3) не изменится
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
2. Груз, подвешенный на пружине, совершает вынужденные гармонические колебания под действием силы, меняющейся с частотой .
Установите соответствие между физическими величинами, характеризующими этот процесс, и частотой их изменения.
К каждой позиции первого столбца подберите соответствующую позицию второго и запишите в таблицу выбранные цифры под соответствующими буквами.
Ответ:
3. Два тела 1 и 2, прикрепленные к одинаковым пружинам, совершают колебания. На рисунке приведены зависимости координат этих тел от времени. Сплошной линией изображены зависимости координат груза массой , пунктиром — тела массой Выберите два верных утверждения о движении тел.
1) Частота колебаний тела 1 равна 1 Гц.
2) Амплитуды колебаний тел одинаковы.
3) Массы первого тела в два раза больше массы второго тела.
4) В промежуток времени между 3 с и 4 с модуль скорости тела 1 уменьшается, а модуль скорости тела 2 увеличиваются.
5) В момент времени 2 с кинетическая энергия тела 2 максимальна.
Ответ:
4. Зависимость смещения груза пружинного маятника от времени имеет следующий вид: , где период Т = 2 с.
Ответ:_______________с.
5. Груз, подвешенный на пружине, жесткостью совершает гармонические колебания с частотой . Какова должна быть жесткость пружины, к которой нужно подвесить этот груз, чтобы частота его колебаний стала равна ?
Ответ:___________________Н/м.
6. Подвешенный на пружине шарик массой 100 г совершает гармонические колебания вдоль вертикальной прямой. Какой должна быть масса шарика, подвешенного к той же пружине, чтобы период его колебаний был в 2 раза меньше первоначального?
Ответ: ______________ г.
7. Груз массой 100 г, закрепленный на пружине, совершает гармонические колебания (см. рис.). Максимальная скорость груза равна 4 м/с. Определите максимальную потенциальную энергию пружины.
Ответ:_________________Дж.
8. Определите длину волны звуковых волн в среде, если скорость звука в этой среде , а частота колебаний
Ответ:_______________м.
9. Скорость распространения волны с периодом 0,5 с равна 20 м/с. Чему равна длина волны?
Ответ:_________________м.
10. На лабораторном столе стоят камертон на 440 Гц и аквариум с водой. По ножке камертона ударили молоточком.
Как изменятся период колебаний и длина звуковой волны при переходе звука из воздуха в воду?
Для каждой величины определите соответствующий характер изменения:
1) увеличится
2) уменьшится
3) не изменится
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
11. Подвешенный к потолку на легкой нерастяжимой нити маленький шарик совершает колебания в вертикальной плоскости. Максимальное отклонение нити от вертикали составляет угол . Сделайте рисунок с указанием сил, приложенных к шарику в тот момент, когда шарик движется влево-вверх, а нить образует угол с вертикалью (см.
Груз массой 400 г подвешен к пружине и совершает колебания. Как изменится период колебаний, если к той же пружине вместо этого груза подвесить тело массой 0,8 кг? Пружинный маятник жёсткостью 2000 Н/м совершает гармонические колебания.
4.2. Математический маятникМатематический маятник совершил 100 колебаний за 628 с. Чему равна длина нити маятника?
Амплитуду колебаний математического маятника уменьшили в 2 раза. Как при этом изменился период колебаний маятника?
Длину нити математического маятника уменьшили в 4 раза. Как при этом изменился период колебаний маятника?
Определите первоначальную длину математического маятника, если известно, что при уменьшении длины маятника на 5 см период колебаний изменился в 1,5 раза.
За одно и то же время первый математический маятник совершил 40 колебаний, а второй 60. Определите отношение длины первого маятника к длине второго.
Длина первого маятника 1 м, второго 2,25 м. За некоторое время первый маятник совершил 15 колебаний. Сколько колебаний за тот же промежуток времени совершил второй маятник?
За один и тот же промежуток времени первый математический маятник совершил 16 колебаний, а второй 10. Определите длину первого маятника, если разность их длин 0,39 м.
Секундный маятник перенесли на поверхность Луны. Чему стал равен период колебаний этого маятника? Ускорение свободного падения на Луне в 6 раз меньше, чем на Земле.
Математический маятник с длиной нити 7 см находится в лифте, который движется с ускорением 3 м/с , направленным вниз.
 Рассчитайте период колебаний маятника.
Рассчитайте период колебаний маятника.Математический маятник с длиной нити 24 см находится в лифте, который движется с ускорением 2 м/с , направленным вверх. Рассчитайте период колебаний маятника.
С каким ускорением двигалась кабина лифта, если секундный маятник, находящийся в ней, совершил 75 колебаний за 100 с? Какое направление имеет ускорение лифта?
При какой скорости поезда маятник с длиной нити 1 м, подвешенный в вагоне, раскачивается наиболее сильно? Длина рельса 30 м.
Математический маятник длиной 10 см совершает колебания вблизи вертикальной стенки, в которую на расстоянии 6,4 см от точки подвеса по вертикали вбит гвоздь, на который маятник наталкивается. Определите период колебаний такого маятника.
К пружине жёсткостью 40 Н/м подвешен груз массой 0,1 кг. Определите период свободных колебаний этого пружинного маятника.
К пружине жёсткостью 200 Н/м подвешен груз массой 0,4 кг. Определите частоту свободных колебаний этого пружинного маятника.
Груз, подвешенный на пружине жёсткостью 250 Н/м, совершает свободные колебания с циклической частотой 50 с-1. Найдите массу груза.
Груз массой 400 г подвешен к пружине и совершает колебания. Как изменится период колебаний, если к той же пружине вместо этого груза подвесить тело массой 0,8 кг?
Груз массой 0,16 кг, подвешенный на пружине, совершает свободные гармонические колебания. Какой массы новый груз нужно подвесить вместо первого, чтобы период колебаний увеличился в 2 раза?
Груз массой 200 г подвешен к пружине и совершает колебания. Как изменится частота колебаний, если к той же пружине вместо этого груза подвесить тело массой 0,8 кг?
Груз массой 0,16 кг, подвешенный на пружине, совершает свободные гармонические колебания.
 Какой массы новый груз нужно подвесить вместо первого, чтобы частота колебаний увеличилась в 2 раза?
Какой массы новый груз нужно подвесить вместо первого, чтобы частота колебаний увеличилась в 2 раза?Груз, подвешенный к пружине, совершает свободные колебания. Как изменится частота колебаний, если массу груза увеличить в 2 раза, а пружину заменить на другую? Коэффициент жёсткости новой пружины в 2 раза меньше старой.
Тело массой 300 г подвешено к цепочке из двух параллельных пружин с коэффициентами жёсткости 500 и 250 Н/м. Определите период собственных колебаний системы.
Тело массой 600 г подвешено к цепочке из двух последовательных пружин с коэффициентами жёсткости 500 и 250 Н/м. Определите частоту колебаний системы.
Математический маятник длиной 0,4 м и пружинный маятник совершают колебания с одинаковым периодом. Определите массу груза пружинного маятника, если жёсткость пружины 20 Н/м.
Сколько раз за одно полное колебание груза на пружине потенциальная энергия пружины принимает своё наибольшее значение?
Сколько раз за одно полное колебание пружинного маятника кинетическая энергия груза бывает равна потенциальной энергии пружины?
Во сколько раз период колебания потенциальной энергии пружины меньше периода колебаний маятника?
Во сколько раз частота колебания кинетической энергии груза пружинного маятника больше частоты колебаний?
Амплитуда колебаний пружинного маятника 5 см, жёсткость пружины 40 Н/м. Чему равна максимальная кинетическая энергия груза?
Тело массой 100 г совершает колебания на пружине с амплитудой 5 см. Максимальное значение модуля скорости этого тела равно 5 м/с. Определите коэффициент жёсткости пружины.
Пружинный маятник жёсткостью 2000 Н/м совершает гармонические колебания.
 Масса груза 50 г. Максимальная скорость груза 20 м/с. Определите амплитуду колебаний.
Масса груза 50 г. Максимальная скорость груза 20 м/с. Определите амплитуду колебаний.9. На рисунке представлен график изменения со временем кинетической энергии ребёнка, качающегося на качелях. Чему равны его полная механическая и потенциальная энергии в момент, соответствующий точке А на графике?
10. На рисунке представлен график зависимости потенциальной энергии математического маятника (относительно положения его равновесия) отвремени. Определите его кинетическую энергию в момент времени t = 2с.
Тело массой 5 кг совершает гармонические колебания с амплитудой 10 см. Максимальная кинетическая энергия колеблющегося тела равна 2,5 Дж. Определите период колебаний.
Амплитуда колебаний пружинного маятника 5 см, масса груза 400 г. Максимальная кинетическая энергия груза равна 0,05 Дж. Определите собственную частоту колебательной системы.
Тело массой 100 г совершает колебания на пружине с амплитудой 5 см. Максимальное значение модуля скорости этого тела равно 5 м/с. Определите частоту колебаний.
Груз массой 2 кг совершает колебания с циклической частотой 5 Гц. Амплитуда колебаний 10 см. Какова максимальная скорость груза?
Максимальная кинетическая энергия материальной точки массой 10 г, совершающей гармонические колебания с периодом 2 с, равна 100 мкДж. С какой амплитудой происходят колебания?
Математический маятник длиной 1 м отводят от положения равновесия и отпускают. Сколько раз за время 6,3 с кинетическая энергия маятника достигнет максимального значения?
4.5. Вынужденные колебания. Резонанс
В какой колебательной системе (совершающей свободные или вынужденные колебания) может наблюдаться резонанс?
При каком условии наступает резонанс?
Приведите примеры разрушительного воздействия резонанса.
4. На рисунке представлен график зависимости амплитуды А вынужденных колебаний отчастоты v вынуждающей силы. При какой частоте происходит резонанс? Чему равна амплитуда колебаний при резонансе?
5. На рисунке изображена зависимость амплитуды установившихся колебаний маятникаот частоты вынуждающей силы (резонансная кривая).
 Определите отношение амплитуды установившихся колебаний маятника на резонансной частоте к амплитуде колебаний начастоте 0,5 Гц.
Определите отношение амплитуды установившихся колебаний маятника на резонансной частоте к амплитуде колебаний начастоте 0,5 Гц.6. Груз, прикреплённый к пружине жёсткостью 40 Н/м, совершает вынужденные колебания. Зависимость амплитуды этих колебаний от частоты воздействия вынуждающей силы представлена на рисунке. Определите полную энергию колебаний груза при резонансе.
15
EF17539 | СПАДИЛО.РУ
Массивный груз, подвешенный к потолку на пружине, совершает вертикальные свободные колебания. Пружина всё время остается растянутой. Как ведут себя потенциальная энергия пружины, кинетическая энергия груза, его потенциальная энергия в поле тяжести, когда груз движется вверх к положению равновесия?
Для каждой величины определите соответствующий характер изменения:
| 1) | увеличивается |
| 2) | уменьшается |
| 3) | не изменяется |
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
📜Теория для решения: Механические колебания
Решение
Алгоритм решения
1.Вспомнить, от чего зависит потенциальная энергия пружины, и установить, как она меняется, когда она поднимает груз в поле тяжести земли к положению равновесия.
2.Вспомнить, от чего зависит кинетическая энергия тел, и установить, как она меняется в рассматриваемый промежуток времени.
3.Вспомнить, от чего зависит потенциальная энергия тел, и установить, как она меняется относительно земли.
Решение
Потенциальная энергия пружины определяется формулой:
Wp=kx22..
где k — коэффициент жесткости пружины, а x — ее удлинение. Величина x была максимальной в нижней точке траектории. Когда пружина начинает сжиматься, она уменьшается. Так как потенциальная энергия зависит от квадрата x прямо пропорционально, то при уменьшении этой величины потенциальная энергия пружины тоже уменьшается.
Кинетическая энергия тела определяется формулой:
Wk=mv22..
В нижней точке траектории скорость шарика была равна нулю. Но к этому времени потенциальная энергия пружины достигла максимума. Она начинает с ускорением поднимать шарик вверх, сжимаясь. Следовательно, скорость растет. Так как кинетическая энергия зависит от квадрата скорости тела прямо пропорционально, то при увеличении скорости этой величины кинетическая энергия шарика тоже увеличивается.
Потенциальная энергия тел в поле тяжести земли определяется формулой:
Wp=mgh
Масса и ускорение свободного падения шарика — постоянные величины. Следовательно, потенциальная энергия зависит только от расстояния до поверхности земли. Когда пружина поднимает шарик, расстояние между ним и землей увеличивается. Так как потенциальная энергия зависит от расстояния прямо пропорционально, то при его увеличении потенциальная энергия шарика тоже растет.
Ответ: 211Свободные колебания – онлайн-тренажер для подготовки к ЕНТ, итоговой аттестации и ВОУД
Колебания – в той или иной степени повторяющийся во времени процесс изменения состояний системы около точки равновесия. Например, при колебаниях маятника повторяются отклонения его в ту и другую сторону от вертикального положения; при колебаниях в электрическом колебательном контуре повторяются величина и направление тока, текущего через катушку.
Колебания почти всегда связаны с попеременным превращением энергии одной формы проявления в другую форму. Колебания различной физической природы имеют много общих закономерностей и тесно взаимосвязаны с волнами. Поэтому исследованиями этих закономерностей занимается обобщенная теория колебаний и волн. Принципиальное отличие от волн: при колебаниях не происходит переноса энергии, это, так сказать, «местные» преобразования энергии.
Свободные колебания – колебания в системе под действием внутренних тел, после того как система выведена из положения равновесия. Колебания груза, подвешенного на нити, или груза, прикрепленного к пружине, – это примеры свободных колебаний. После выведения этих систем из положения равновесия создаются условия, при которых тела колеблются без воздействия внешних сил. Система – группа тел, движение которых мы изучаем. Внутренние силы – силы, действующие между телами системы. Внешние силы – силы, действующие на тела системы со стороны тел, не входящих в нее.
Колебания груза, подвешенного на нити, или груза, прикрепленного к пружине, – это примеры свободных колебаний. После выведения этих систем из положения равновесия создаются условия, при которых тела колеблются без воздействия внешних сил. Система – группа тел, движение которых мы изучаем. Внутренние силы – силы, действующие между телами системы. Внешние силы – силы, действующие на тела системы со стороны тел, не входящих в нее.
Условия возникновения свободных колебаний.
- При выведении тела из положения равновесия в системе должна возникать сила, направленная к положению равновесия и, следовательно, стремящаяся возвратить тело в положение равновесия. Пример: при перемещении прикрепленного к пружине шарика влево и при его перемещении вправо сила упругости направлена к положению равновесия.
- Трение в системе должно быть достаточно мало. Иначе колебания быстро затухнут или вовсе не возникнут. Незатухающие колебания возможны лишь при отсутствии трения.
Для того чтобы свободные колебания совершались по гармоническому закону, необходимо, чтобы сила, стремящаяся возвратить тело в положение равновесия, была пропорциональна смещению тела из положения равновесия и направлена в сторону, противоположную смещению:
|
\(F (t) = ma (t) = \ –m ω_2 x (t)\). |
В этом соотношении \(\omega\) – круговая частота гармонических колебаний. Таким свойством обладает упругая сила в пределах применимости закона Гука:
Силы любой другой физической природы, удовлетворяющие этому условию, называются квазиупругими.
Таким образом, груз некоторой массы m, прикрепленный к пружине с жесткостью k, второй конец которой закреплен неподвижно, составляют систему, способную в отсутствие трения совершать свободные гармонические колебания. 2=\frac km\).
2=\frac km\).
Все физические системы (не только механические), описываемые уравнением (·), способны совершать свободные гармонические колебания, так как решением этого уравнения являются гармонические функции вида
\(x=x_mcos(\omega t+\varphi_0)\).
Уравнение (·) называется уравнением свободных колебаний. Следует обратить внимание на то, что физические свойства колебательной системы определяют только собственную частоту колебаний \(ω_0\) или период T. Такие параметры колебательного процесса, как амплитуда \(x_m\) и начальная фаза φ0, определяются способом, с помощью которого система была выведена из состояния равновесия в начальный момент времени.
Если, например, груз был смещен из положения равновесия на расстояние \(ΔI \) и затем в момент времени \(t = 0\) отпущен без начальной скорости, то \(xm = ΔI, φ0 = 0\).
Если же грузу, находившемуся в положении равновесия, с помощью резкого толчка была сообщена начальная скорость \(\pm v_0,\) то \(x_m=\sqrt{\frac mk}v_0,\varphi_0=\pm\frac \pi2.\)
Таким образом, амплитуда \(x_m\) свободных колебаний и его начальная фаза \(φ_0\) определяются начальными условиями.
30 Выберите один вариант ответа.
Н ебольшой груз, подвешенный на длинной нити, совершает свободные гармонические колебания согласно графику представленному на рисунке. После увеличения длины нити график свободных колебаний маятника будет иметь вид, показанный на рисунке.
Варианты ответа:
А Б В Г
3 1. Выберите один вариант ответа.
Груз на пружине совершает свободные гармонические колебания согласно графику представленному на рисунке. После уменьшения массы груза график свободных колебаний маятника будет иметь вид, показанный на рисунке…
Варианты ответа:
А Б В Г
32 Выберите один вариант ответа.
Материальная точка совершает гармонические колебания по закону . Максимальное ускорение точки будет равно…
Варианты ответа: ; ; ;
3 3.На рисунке представлены графики гармонических колебаний материальных точек одинаковой массы. Соотношение энергий. W колеблющихся тел следующее…
Варианты ответа
34. В колебательном –контуре максимальное значение энергии электрического поля конденсатора равно 50 Дж, максимальное значение энергии магнитного поля соленоида 50 Дж. Полная энергия электромагнитного поля контура …
не изменяется и равна 50 Дж
изменяется в пределах от 50 до 100 Дж
не изменяется и равна 100 Дж
изменяется в пределах от 0 до 100 Дж
19. Массивный груз, подвешенный к потолку на пружине, совершает вертикальные свободные колебания. Пружина всё время остается растянутой. Как ведут себя потенциальная энергия пружины, кинетическая энергия груза, его потенциальная энергия в поле тяжести
Основные понятия:Физическая величина, равная произведению массы тела на скорость его движения, называется импульсом тела.

Физическая величина, равная произведению силы на время ее действия, называется импульсом силы
Неупругий удар (тело»прилипает» к стенке):
Абсолютно упругий удар (тело отскакивает с прежней по величине скоростью):
Закон сохранения импульса: В замкнутой системе векторная сумма импульсов всех тел, входящих в систему, остается постоянной при любых взаимодействиях тел этой системы между собой.
Если на систему тел не действуют внешние силы со стороны других тел, такая система называется замкнутой
Работой A, совершаемой постоянной силой называется физическая величина, равная произведению модулей силы и перемещения, умноженному на косинус угла
· между векторами силы и перемещения.
Работа является скалярной величиной. Она может быть:
положительной (0°
·
· отрицательной (90° ·
· 180°).
При
· = 90° работа, совершаемая силой, равна нулю.
Работа всех приложенных сил равна работе равнодействующей силы
Кинетическая энергия – это энергия движения.
Физическая величина, равная половине произведения массы тела на квадрат его скорости, называется кинетической энергией тела:
Теорема о кинетической энергии: работа приложенной к телу равнодействующей силы равна изменению его кинетической энергии:
Если начальная скорость движения тела массой m равна нулю и тело увеличивает свою скорость до значения v, то работа силы равна конечному значению кинетической энергии тела:
При движении тела вниз по наклонной плоскости сила тяжести совершает работу
Работа силы тяжести не зависит от траектории движения тела и всегда равна произведению модуля силы тяжести на разность высот в начальном и конечном положениях.
Силы, работа которых не зависит от траектории движения тела и определяется только начальным и конечным положениями называются консервативными.
Работа консервативных сил на замкнутой траектории равна нулю.
Потенциальная энергия — энергии взаимодействия тел
Потенциальная энергия — это энергия, которая определяется взаимным положением взаимодействующих тел или частей одного тела
Значение потенциальной энергии тела, поднятого над Землей, зависит от выбора нулевого уровня, т. е. высоты, на которой потенциальная энергия принимается равной нулю
е. высоты, на которой потенциальная энергия принимается равной нулю
Сумма кинетической и потенциальной энергии тел, называется полной механической энергией: E = Ek + Ep
Полная механическая энергия замкнутой системы тел остается неизменной.
Закон сохранения и превращения энергии: при любых физических взаимодействиях энергия не возникает и не исчезает. Она лишь превращается из одной формы в другую.
Задачи:
1.Тело массой 2 кг движется вдоль оси ОХ. Его координата меняется в соответствии с уравнением х = А + Вt + Ct2, где A = 2 м, B = 3 м/с, C = 5 м/с2. Чему равен импульс тела в момент времени t = 2 c?
86 кг(м/с
48 кг(м/с
46 кг(м/с
26 кг(м/с
2.Два автомобиля одинаковой массы m движутся со скоростями
· и 2
· относительно земли по одной прямой в противоположных направлениях. Чему равен модуль импульса второго автомобиля в системе отсчета, связанной с первым автомобилем?
3. Шары одинаковой массы движутся так, как показано на рисунке, и абсолютно неупруго соударяются. Как будет направлен импульс шаров после соударения?
4. Легковой автомобиль и грузовик движутся со скоростями
·1 = 108 км/ч и
·2 = 54 км/ч. Масса легкового автомобиля m1 = 1000 кг. Какова масса грузовика, если отношение импульса грузовика к импульсу легкового автомобиля равно 1,5?
5. Тележка массой m, движущаяся со скоростью
·, сталкивается с неподвижной тележкой той же массы и сцепляется с ней. Импульс тележек после взаимодействия равен
0
m
·/2
m
·
2m
·
6. Тележка массой 20 кг, движущаяся со скоростью 0,8 м/с, сцепляется с другой тележкой массой 30 кг, движущейся навстречу со скоростью 0,2 м/с. Чему равна скорость движения тележек после сцепки, когда тележки будут двигаться вместе?
7. Мальчик массой 50 кг, стоя на очень гладком льду, бросает груз массой 8 кг под углом 60о к горизонту со скоростью 5 м/с. Какую скорость приобретет мальчик?
·8. Для придания наиболее эффективного ускорения космическому кораблю струя выхлопных газов, вырывающаяся из сопла его ракетного двигателя, должна быть направлена
по направлению движения корабля
противоположно направлению движения корабля
перпендикулярно направлению движения корабля
под произвольным углом к направлению движения корабля
9. ДВА ПЛАСТИЛИНОВЫХ ШАРИКА МАССАМИ m1 = 0,1 КГ И m2 = 0,2 КГ ЛЕТЯТ НАВСТРЕЧУ ДРУГ ДРУГУ СО СКОРОСТЯМИ
ДВА ПЛАСТИЛИНОВЫХ ШАРИКА МАССАМИ m1 = 0,1 КГ И m2 = 0,2 КГ ЛЕТЯТ НАВСТРЕЧУ ДРУГ ДРУГУ СО СКОРОСТЯМИ
·1 = 20 М/С И
·2 = 10 М/С,. СТОЛКНУВШИСЬ, ОНИ СЛИПАЮТСЯ. НА СКОЛЬКО ИЗМЕНИЛАСЬ ВНУТРЕННЯЯ ЭНЕРГИЯ ШАРИКОВ ПРИ СТОЛКНОВЕНИИ?
10. ДЛЯ ТОГО, ЧТОБЫ УМЕНЬШИТЬ КИНЕТИЧЕСКУЮ ЭНЕРГИЮ ТЕЛА В 2 РАЗА, НАДО СКОРОСТЬ ТЕЛА УМЕНЬШИТЬ В
11. ПУЛЯ МАССОЙ 50 Г ВЫЛЕТАЕТ ИЗ СТВОЛА РУЖЬЯ ВЕРТИКАЛЬНО ВВЕРХ СО СКОРОСТЬЮ 40 М/С. ЧЕМУ РАВНА ПОТЕНЦИАЛЬНАЯ ЭНЕРГИЯ ПУЛИ ЧЕРЕЗ 4 С ПОСЛЕ НАЧАЛА ДВИЖЕНИЯ? СОПРОТИВЛЕНИЕМ ВОЗДУХА ПРЕНЕБРЕЧЬ.
12. ТЯЖЕЛЫЙ МОЛОТ ПАДАЕТ НА СВАЮ И ВБИВАЕТ ЕЕ В ЗЕМЛЮ. В ЭТОМ ПРОЦЕССЕ ПРОИСХОДИТ ПРЕОБРАЗОВАНИЕ
потенциальной энергии молота во внутреннюю энергию сваи
кинетической энергии молота во внутреннюю энергию молота, сваи, почвы
внутренней энергии молота в кинетическую и потенциальную энергию сваи
внутренней энергии молота во внутреннюю энергию сваи и почвы.
13. ТЕЛО, БРОШЕННОЕ ВЕРТИКАЛЬНО ВВЕРХ С ПОВЕРХНОСТИ ЗЕМЛИ, ДОСТИГАЕТ НАИВЫСШЕЙ ТОЧКИ И ПАДАЕТ НА ЗЕМЛЮ. ЕСЛИ СОПРОТИВЛЕНИЕ ВОЗДУХА НЕ УЧИТЫВАТЬ, ТО ПОЛНАЯ МЕХАНИЧЕСКАЯ ЭНЕРГИЯ ТЕЛА
одинакова в любые моменты движения тела
максимальна в момент начала движения
максимальна в момент достижения наивысшей точки
максимальна в момент падения на землю
14. НА ЗЕМЛЮ УПАЛ ИЗ КОСМИЧЕСКОГО ПРОСТРАНСТВА МЕТЕОРИТ. ИЗМЕНИЛИСЬ ЛИ МЕХАНИЧЕСКАЯ ЭНЕРГИЯ И ИМПУЛЬС СИСТЕМЫ «ЗЕМЛЯ – МЕТЕОРИТ» В РЕЗУЛЬТАТЕ СТОЛКНОВЕНИЯ?
изменились и механическая энергия системы, и её импульс
импульс системы не изменился, её механическая энергия изменилась
механическая энергия системы не изменилась, её импульс изменился
не изменились
15. СКОРОСТЬ БРОШЕННОГО МЯЧА НЕПОСРЕДСТВЕННО ПЕРЕД УДАРОМ О СТЕНУ БЫЛА ВДВОЕ БОЛЬШЕ ЕГО СКОРОСТИ СРАЗУ ПОСЛЕ УДАРА. ПРИ УДАРЕ ВЫДЕЛИЛОСЬ КОЛИЧЕСТВО ТЕПЛОТЫ, РАВНОЕ 15 ДЖ. НАЙДИТЕ КИНЕТИЧЕСКУЮ ЭНЕРГИЮ МЯЧА ПЕРЕД УДАРОМ.
16. Два пластилиновых шарика массами по 50 г движутся с одинаковыми по модулю скоростями 0,8 м/с, направленными под углом 90
· друг к другу. Какая часть энергии перейдёт в тепло при абсолютно неупругом ударе?
Какая часть энергии перейдёт в тепло при абсолютно неупругом ударе?
17. Шар массой М=1кг, подвешенный на нити длиной l=90см, отводят от положения равновесия на угол 600 и отпускают. В момент прохождения шаром положения равновесия в него попадает пуля массой m=10г,летящая навстречу шару со скоростью 300м/с. Она пробивает его и продолжает двигаться горизонтально со скоростью200 м/с. На какой угол поднимется шар после прохождения пули.(массу шара считайте неизменной, диаметр шара –пренебрежимо малым по сравнению с длиной нити).
18. На графике показана зависимость проекции импульса Рх тележки от времени. Какой вид имеет график изменения проекции равнодействующей всех сил Fх, действующих на тележку, от времени?
19. Массивный груз, подвешенный к потолку на пружине, совершает вертикальные свободные колебания. Пружина всё время остается растянутой. Как ведут себя потенциальная энергия пружины, кинетическая энергия груза, его потенциальная энергия в поле тяжести, когда груз движется вверх к положению равновесия?
Для каждой величины определите соответствующий характер изменения:
1) увеличивается
2) уменьшается
3) не изменяется
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Потенциальная энергия пружины
Кинетическая энергия груза
Потенциальная энергия груза в поле тяжести
13 EMBED Equation.3 1415
13 EMBED Equation.3 1415
13 EMBED Equation.3 1415
13 EMBED Equation.3 1415
13 EMBED Equation.3 1415
13 EMBED Equation.3 1415
13 EMBED Equation.3 1415
13 EMBED Equation.3 1415
Рисунок 1Рисунок 3Рисунок 48Рисунок 33Рисунок 36Root EntryEquation NativeEquation NativeEquation NativeEquation NativeEquation Native
Приложенные файлы
- 19771254
Размер файла: 120 kB Загрузок: 0
Потенциальная энергия пружины в поле тяжести
Модель представляет собой демонстрацию, иллюстрирующую понятие «Потенциальная энергия». 2)/2, то есть пропорциональна квадрату растяжения. Теперь понятно, что потенциальная энергия этой пружины на уровне 2 больше, чем на уровне 1? На уровнях 1 и 2 груз имеет нулевую скорость, на уровне 0 – максимальную, следовательно кинетическая энергия на этом уровне максимальна.
2)/2, то есть пропорциональна квадрату растяжения. Теперь понятно, что потенциальная энергия этой пружины на уровне 2 больше, чем на уровне 1? На уровнях 1 и 2 груз имеет нулевую скорость, на уровне 0 – максимальную, следовательно кинетическая энергия на этом уровне максимальна.
Теперь к задаче.
Груз находится на уровне 1 и начинает движение вниз.
Тогда, его потенциальная энергия пружины РАСТЕТ, потому что пружина растягивается.
Кинетическая энергия груза растет, так как растет скорость груза.
Потенциальная энергия груза уменьшается, так как уменьшается высота от Земли. Потенциальная энергия (величина) зависит от выбора системы координат, но изменение от этого не зависит.
Гиря массой 2 кг подвешена на тонком шнуре. Если её отклонить от положения равновесия на 10 см, а затем отпустить, она совершает свободные колебания как математический маятник. Что произойдет с периодом колебаний гири, максимальной потенциальной энергией гири и частотой ее колебаний, если начальное отклонение гири будет равно 5 см?
Для каждой величины определите соответствующий характер изменения:
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
| Период |
| Частота |
| Максимальная потенциальная энергия гири |
Отзыв
Максимальная потенциальная энергия гири
Вопрос 5
Текст вопроса
Конденсатор колебательного контура заряжают от источника постоянного напряжения, а затем замыкают на катушки с различными индуктивностями: L 1, L 2, L 3. Подберите во втором столбце таблицы слова, правильно характеризующие изменения параметров гармонических колебаний в колебательном контуре при уменьшении индуктивности катушек в таких опытах
Для каждой величины определите соответствующий характер изменения:
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Цифры в ответе могут повторяться.
| Амплитуда колебаний заряда конденсатора | Частота колебаний | Амплитуда колебаний силы |
Отзыв
Амплитуда колебаний заряда конденсатора
Амплитуда колебаний силы
Вопрос 6
Текст вопроса
Гиря массой 2 кг подвешена на длинном тонком шнуре. Если ее отклонить от положения равновесия на 10 см, а затем отпустить, она совершает свободные колебания как математический маятник с периодом 1 с. Что произойдет с периодом, максимальной потенциальной энергией гири и частотой ее колебаний, если начальное отклонение гири будет равно 20 см?
Для каждой величины определите соответствующий характер изменения:
1)увеличится 2)уменьшится 3) не изменится
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Максимальная потенциальная энергия гири
Отзыв
Максимальная потенциальная энергия гири
Вопрос 7
Текст вопроса
D01B4E Массивный груз, подвешенный к потолку на пружине, совершает вертикальные свободные колебания. Пружина всё время остаётся растянутой. Как ведёт себя потенциальная энергия пружины, кинетическая энергия груза, его потенциальная энергия в поле тяжести, когда груз движется вниз от положения равновесия?
Для каждой величины определите соответствующий характер изменения:
3) не изменяется
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Потенциальная энергия пружины
Кинетическая энергия груза
Потенциальная энергия груза
в поле тяжести
Отзыв
Потенциальная энергия пружины
Кинетическая энергия груза
Потенциальная энергия груза в поле тяжести
Вопрос 8
Текст вопроса
C3BF58 Массивный груз, подвешенный к потолку на пружине, совершает вертикальные свободные колебания. Пружина всё время остаётся растянутой. Как ведёт себя потенциальная энергия пружины, кинетическая энергия груза, его потенциальная энергия в поле тяжести, когда груз движется вверх от положения равновесия?
Для каждой величины определите соответствующий характер изменения:
3) не изменяется
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Цифры в ответе могут повторяться.
Потенциальная энергия пружины
Кинетическая энергия груза
Потенциальная энергия груза в поле тяжести
Отзыв
Потенциальная энергия пружины
Кинетическая энергия груза
Потенциальная энергия груза в поле тяжести
Вопрос 9
Текст вопроса
97543B На демонстрационном столе в кабинете физики стоят камертон на 440 Гц и аквариум с водой. Учитель ударил молоточком по ножке камертона.
Как изменятся скорость звуковой волны, частота колебаний и длина волны при переходе звука из воздуха в воду?
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Скорость звуковой волны
Отзыв
Скорость звуковой волны
Вопрос 10
Текст вопроса
F0FEC9 На гладком горизонтальном столе пружинный маятник совершает свободные незатухающие колебания. Затем пружину заменяют на пружину большей жёсткости, а амплитуду колебаний оставляют неизменной. Как изменятся при этом три величины: период колебаний, максимальная потенциальная энергия маятника, его максимальная кинетическая энергия?
Для каждой величины определите соответствующий характер изменения:
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Максимальная потенциальная энергия маятника
Максимальная кинетическая энергия маятника
Отзыв
Максимальная потенциальная энергия маятника
Максимальная кинетическая энергия маятника
Вопрос 11
Текст вопроса
1221CA Груз массой m, подвешенный к пружине, совершает колебания с периодом T и амплитудой x 0. Что произойдет с периодом, максимальной потенциальной энергией пружины и частотой, если при неизменной амплитуде уменьшить массу?
К каждой позиции первого столбца подберите соответствующую позицию второго и запишите в таблицу выбранные цифры под соответствующими буквами.
Получившуюся последовательность цифр перенесите в бланк ответов (без пробелов и каких-либо символов).
В) максимальная потенциальная энергия пружины
Отзыв
В) максимальная потенциальная энергия пружины
Вопрос 12
Текст вопроса
A3567F Груз изображённого на рисунке пружинного маятника совершает гармонические колебания между точками 1 и 3. Как меняется кинетическая энергия груза маятника, потенциальная энергия и жёсткость пружины при движении груза маятника от точки 2 к точке 1?
Для каждой величины определите соответствующий характер изменения:
3) не изменяется
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Кинетическая энергия груза маятника
Потенциальная энергия пружины маятника
Отзыв
Потенциальная энергия пружины маятника
Кинетическая энергия груза маятника
Вопрос 13
Текст вопроса
7AC008 Груз изображённого на рисунке пружинного маятника совершает гармонические колебания между точками 1 и 3. Как меняется потенциальная энергия пружины маятника, кинетическая энергия груза и жёсткость пружины при движении груза маятника от точки 1 к точке 2? Для каждой величины определите соответствующий характер её изменения:
3) не изменяется
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Потенциальная энергия пружины маятника
Кинетическая энергия груза
Отзыв
Кинетическая энергия груза
Потенциальная энергия пружины маятника
Вопрос 14
Текст вопроса
FA782D В школьной лаборатории изучают колебания пружинного маятника при различных значениях массы маятника. Если увеличить массу маятника, то как изменятся 3 величины: период его колебаний, их частота, период изменения его потенциальной энергии?
К каждой позиции первого столбца подберите нужную позицию второго и запишите в таблицу выбранные цифры под соответствующими буквами.
А) период колебаний
Б) частота колебаний
В) период изменения потенциальной энергии
Отзыв
А) период колебаний
Б) частота колебаний
В) период изменения потенциальной энергии
Вопрос 15
Текст вопроса
0047A6 В первой серии опытов по исследованию малых колебаний разных грузиков на нерастяжимой нити одинаковой длины использовался алюминиевый грузик, во второй – железный такого же объёма. Максимальный угол отклонения нити от вертикали в обоих исследованиях одинаковый.
Максимальный угол отклонения нити от вертикали в обоих исследованиях одинаковый.
Как при переходе от первой серии опытов ко второй изменятся период колебаний, частота колебаний и максимальная кинетическая энергия грузика?
Для каждой величины определите соответствующий характер изменения:
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Период колебаний грузика
Частота колебаний грузика
Максимальная кинетическая энергия грузика
Отзыв
Максимальная кинетическая энергия грузика
Период колебаний грузика
Частота колебаний грузика
Вопрос 16
Текст вопроса
BB2c18 В первой серии опытов по исследованию малых колебаний разных грузов на нити одинаковой длины использовался железный грузик, во второй – алюминиевый такого же объёма. Угол отклонения нити от вертикали в обоих исследованиях одинаковый.
Как при переходе от первой серии опытов ко второй изменяется период колебаний, частота и максимальная кинетическая энергия груза?
Для каждой величины определите соответствующий характер изменения:
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Отзыв
Максимальная кинетическая энергия груза
Вопрос 17
Текст вопроса
c2Fe6A В первой серии опытов по исследованию малых колебаний разных грузиков на нити одинаковой длины использовался алюминиевый грузик, во второй – деревянный такой же массы. Максимальный угол отклонения нити от вертикали в обоих исследованиях одинаковый.
Как при переходе от первой серии опытов ко второй изменятся период колебаний, частота колебаний и максимальная потенциальная энергия грузика, отсчитываемая от положения равновесия?
Для каждой величины определите соответствующий характер изменения:
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Период колебаний грузика
Частота колебаний грузика
Максимальная потенциальная энергия грузика
Отзыв
Частота колебаний грузика
Период колебаний грузика
Максимальная потенциальная энергия грузика
Вопрос 18
Текст вопроса
CF07FE В1 Груз изображенного на рисунке пружинного маятника совершает гармонические колебания между точками 1 и 3. Как меняются кинетическая энергия груза маятника, скорость груза и жесткость пружины при движении груза маятника от точки 2 к точке 1?
Как меняются кинетическая энергия груза маятника, скорость груза и жесткость пружины при движении груза маятника от точки 2 к точке 1?
Для каждой величины определите соответствующий характер изменения:
3) не изменилась
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Отзыв
Кинетическая энергия груза маятника
Вопрос 19
Текст вопроса
22707F Груз изображённого на рисунке пружинного маятника совершает гармонические колебания между точками 1 и 3. Как меняется кинетическая энергия груза маятника, модуль скорости груза и жёсткость пружины при движении груза маятника от точки 2 к точке 1?
Для каждой величины определите соответствующий характер её изменения:
3) не изменяется
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Кинетическая энергия груза маятника
Модуль скорости груза
Отзыв
Кинетическая энергия груза маятника
Модуль скорости груза
Вопрос 20
Текст вопроса
7DB8EC В первой серии опытов исследовались малые колебания груза на нити некоторой длины. Затем этот же груз закрепили на нити большей длины. Максимальные углы отклонения нити от вертикали в опытах одинаковые.
Как при переходе от первой серии опытов ко второй изменятся период колебаний, частота и амплитуда колебаний груза?
Для каждой величины определите соответствующий характер изменения:
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Отзыв
Вопрос 21
Текст вопроса
Груз изображённого на рисунке пружинного маятника совершает гармонические колебания между точками 1 и 3. Как меняются кинетическая энергия груза маятника, потенциальная энергия и жесткость пружины при движении груза маятника от точки 2 к точке 3?
Для каждой величины определите соответствующий характер её изменения:
1) увеличивается 2) уменьшается 3) не изменяется
Запишите в таблицу выбранные цифры для каждой физической величины. Цифры в ответе могут повторяться.
Цифры в ответе могут повторяться.
Кинетическая энергия груза маятника
Потенциальная энергия пружины маятника
“>
Движение массы на пружине
В предыдущей части этого урока движение массы, прикрепленной к пружине, было описано как пример колебательной системы. Масса при движении пружины обсуждалась более подробно, поскольку мы стремились понять математические свойства объектов, находящихся в периодическом движении. Теперь мы исследуем движение массы на пружине еще более подробно, поскольку мы сосредоточимся на том, как различные величины меняются с течением времени. Такие величины будут включать силы, положение, скорость и энергию — как кинетическую, так и потенциальную энергию.
Закон ГукаМы начнем наше обсуждение с исследования сил, которые пружина оказывает на висящую массу. Рассмотрим показанную справа систему с пружиной, прикрепленной к опоре. Пружина висит в расслабленном, нерастянутом состоянии. Если бы вы взяли пружину за нижнюю часть и потянули вниз, она бы растянулась. Если бы вы потянули с небольшим усилием, пружина немного растянулась бы.А если бы вы тянули с гораздо большей силой, пружина растянулась бы гораздо сильнее. Каково точное количественное соотношение между величиной тягового усилия и величиной растяжения?
Чтобы определить это количественное соотношение между величиной силы и величиной растяжения, к пружине могут быть прикреплены объекты известной массы. Для каждого добавляемого объекта можно измерить степень растяжения. Сила, которая применяется в каждом случае, будет весом объекта.Регрессионный анализ данных «сила-растяжение» может быть выполнен для определения количественной взаимосвязи между силой и величиной растяжения. В таблице данных ниже показаны некоторые репрезентативные данные для такого эксперимента.
Масса (кг) | Усилие на пружине (Н) | Величина растяжения (м) |
0. | 0,000 | 0,0000 |
0,050 | 0,490 | 0,0021 |
0,100 | 0,980 | 0.0040 |
0,150 | 1,470 | 0,0063 |
0.200 | 1,960 | 0,0081 |
0,250 | 2.450 | 0,0099 |
0,300 | 2.940 | 0,0123 |
0,400 | 3.920 | 0,0160 |
0.500 | 4,900 | 0,0199 |
 000
000Построив график данных «сила-растяжение» и выполнив линейный регрессионный анализ, можно определить количественное соотношение или уравнение. Сюжет показан ниже.
Анализ линейной регрессии дает следующую статистику:
наклон = 0.00406 м / н.
y-перехват = 3,43 x10 -5 ( pert близко к 0,000)
константа регрессии = 0,999
Уравнение для этой линии:
Растяжение = 0,00406 • Сила + 3,43×10 -5
Тот факт, что константа регрессии очень близка к 1.000, указывает на наличие точного соответствия между уравнением и точками данных. Этот с сильной посадкой придает достоверность результатам эксперимента.
Эта взаимосвязь между силой, приложенной к пружине, и величиной растяжения была впервые обнаружена в 1678 году английским ученым Робертом Гуком. Как выразился Гук: Uttensio, sic vis . В переводе с латыни это означает «Как расширение, так и сила». Другими словами, сила растяжения пружины пропорциональна силе, с которой она тянет.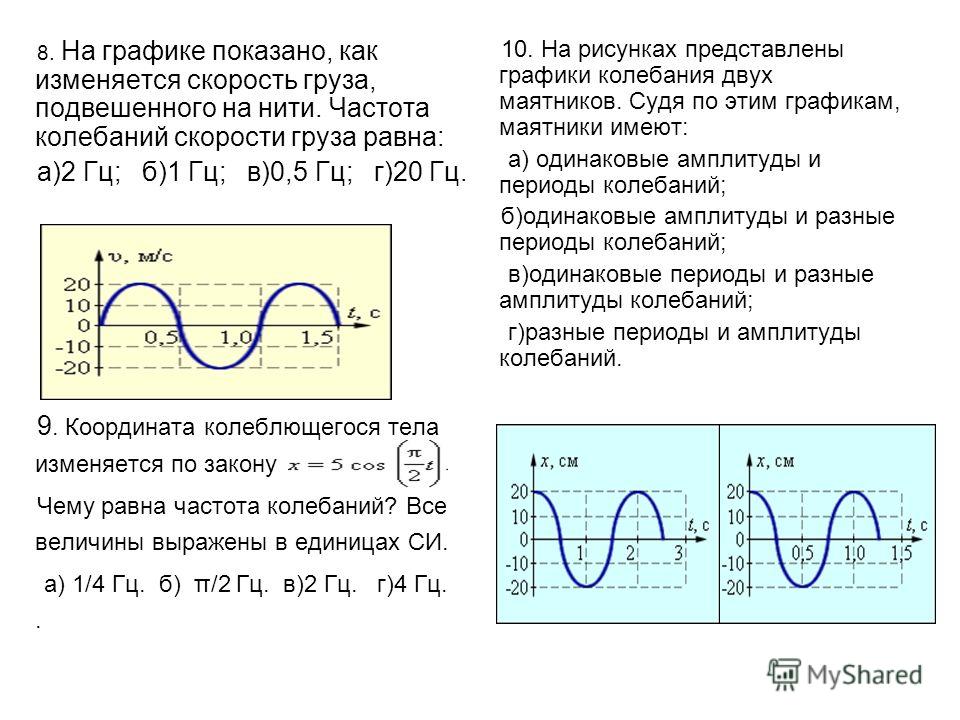 Если бы мы завершили это исследование около 350 лет назад (и если бы мы немного знали латынь), мы были бы известны! Сегодня это количественное соотношение между силой и растяжением называется законом Гука и часто обозначается в учебниках как
Если бы мы завершили это исследование около 350 лет назад (и если бы мы немного знали латынь), мы были бы известны! Сегодня это количественное соотношение между силой и растяжением называется законом Гука и часто обозначается в учебниках как
F пружина = -k • x
, где Fspring — сила, действующая на пружину, x — величина, на которую пружина растягивается относительно своего расслабленного положения, а k — константа пропорциональности, часто называемая постоянной пружины.Жесткость пружины — это положительная постоянная, значение которой зависит от исследуемой пружины. Жесткая пружина будет иметь высокую жесткость пружины. Это означает, что потребуется относительно большое количество силы, чтобы вызвать небольшое смещение. Единицы жесткости пружины — ньютон на метр (Н / м). Отрицательный знак в приведенном выше уравнении указывает на то, что направление растяжения пружины противоположно направлению силы, создаваемой пружиной. Например, когда пружина была растянута ниже своего расслабленного положения, x равен вниз .Пружина реагирует на это растяжение, прикладывая усилие вверх, . Буквы x и F противоположны. Последний комментарий относительно этого уравнения заключается в том, что оно работает для пружины, растянутой по вертикали, и для пружины, растянутой по горизонтали (например, той, которая будет обсуждаться ниже).
Расчет силы массы на пружинеРанее в этом уроке мы узнали, что на вибрирующий объект действует восстанавливающая сила.Возвратная сила заставляет вибрирующий объект замедляться при удалении от положения равновесия и ускоряться при приближении к положению равновесия. Именно эта восстанавливающая сила отвечает за вибрацию. Итак, какова восстанавливающая сила массы на пружине?
Мы начнем обсуждение этого вопроса с рассмотрения системы на диаграмме ниже.
На схеме изображены воздушная трасса и планер. Планер прикреплен пружиной к вертикальной опоре. Трение между планером и воздушной трассой незначительно. Таким образом, на планер действуют три доминирующие силы. Эти три силы показаны на диаграмме свободного тела справа. Сила тяжести (Fgrav) — довольно предсказуемая сила — как по величине, так и по направлению. Сила тяжести всегда направлена вниз; его величина может быть найдена как произведение массы и ускорения свободного падения (м • 9.8 Н / кг). Опорная сила (Fsupport) уравновешивает силу тяжести. Он подается воздухом из воздушной трассы, заставляя планер левитировать на над поверхностью гусеницы. Конечная сила — это сила пружины (Fspring). Как обсуждалось выше, сила пружины изменяется по величине и по направлению. Его величину можно найти с помощью закона Гука. Его направление всегда противоположно направлению растяжения и к положению равновесия. Когда планер с воздушным гусеничным ходом выполняет движение вперед и назад , сила пружины (Fspring) действует как восстанавливающая сила.Он действует на планер влево, когда он расположен справа от положения равновесия; и он действует на планер вправо, когда он расположен слева от положения равновесия.
Планер прикреплен пружиной к вертикальной опоре. Трение между планером и воздушной трассой незначительно. Таким образом, на планер действуют три доминирующие силы. Эти три силы показаны на диаграмме свободного тела справа. Сила тяжести (Fgrav) — довольно предсказуемая сила — как по величине, так и по направлению. Сила тяжести всегда направлена вниз; его величина может быть найдена как произведение массы и ускорения свободного падения (м • 9.8 Н / кг). Опорная сила (Fsupport) уравновешивает силу тяжести. Он подается воздухом из воздушной трассы, заставляя планер левитировать на над поверхностью гусеницы. Конечная сила — это сила пружины (Fspring). Как обсуждалось выше, сила пружины изменяется по величине и по направлению. Его величину можно найти с помощью закона Гука. Его направление всегда противоположно направлению растяжения и к положению равновесия. Когда планер с воздушным гусеничным ходом выполняет движение вперед и назад , сила пружины (Fspring) действует как восстанавливающая сила.Он действует на планер влево, когда он расположен справа от положения равновесия; и он действует на планер вправо, когда он расположен слева от положения равновесия.
Предположим, что планер отведен вправо от положения равновесия и выпущен из состояния покоя. На диаграмме ниже показано направление силы пружины в пяти различных положениях на пути параплана. Когда параплан перемещается из положения A (точка спуска) в положение B, а затем в положение C, сила пружины действует влево на планер, движущийся влево.Когда параплан приближается к положению C, степень растяжения пружины уменьшается, а сила пружины уменьшается в соответствии с законом Гука. Несмотря на это уменьшение силы пружины, по-прежнему существует ускорение, вызванное восстанавливающей силой для всего размаха от положения A до положения C. В положении C параплан достиг максимальной скорости. Как только параплан проходит влево от положения C, сила пружины действует вправо. Во время этой фазы цикла планера пружина сжимается. Чем дальше от положения C движется параплан, тем больше степень сжатия и сила пружины. Эта сила пружины действует как восстанавливающая сила, замедляя параплан, когда он перемещается из положения C в положение D в положение E. К тому времени, когда параплан достигает положения E, он замедляется до положения кратковременного покоя, прежде чем изменить свое направление и возвращаясь к положению равновесия. Во время движения планера из положения E в положение C степень сжатия пружины уменьшается, а сила пружины уменьшается.На всем пути от положения E до положения C по-прежнему наблюдается ускорение. В положении C параплан достиг максимальной скорости. Теперь планер начинает двигаться вправо от точки C. При этом сила пружины действует влево на движущийся вправо планер. Эта восстанавливающая сила заставляет параплан замедляться на всем пути от положения C до положения D и до положения E.
Чем дальше от положения C движется параплан, тем больше степень сжатия и сила пружины. Эта сила пружины действует как восстанавливающая сила, замедляя параплан, когда он перемещается из положения C в положение D в положение E. К тому времени, когда параплан достигает положения E, он замедляется до положения кратковременного покоя, прежде чем изменить свое направление и возвращаясь к положению равновесия. Во время движения планера из положения E в положение C степень сжатия пружины уменьшается, а сила пружины уменьшается.На всем пути от положения E до положения C по-прежнему наблюдается ускорение. В положении C параплан достиг максимальной скорости. Теперь планер начинает двигаться вправо от точки C. При этом сила пружины действует влево на движущийся вправо планер. Эта восстанавливающая сила заставляет параплан замедляться на всем пути от положения C до положения D и до положения E.
Ранее в этом уроке обсуждались изменения положения груза на пружине во времени.Тогда было показано, что положение груза на пружине зависит от времени. Обсуждение касалось массы, которая колебалась вверх и вниз, будучи подвешенной на пружине. В такой же мере обсуждение будет применимо и к нашему планеру, движущемуся по воздушной трассе. Если бы детектор движения был размещен в правом конце воздушной трассы для сбора данных для графика зависимости положения от времени, график выглядел бы так, как показано на рисунке ниже. Положение A — это крайняя правая позиция на воздушной трассе, когда планер находится ближе всего к детектору.
Помеченные позиции на диаграмме выше — это те же позиции, которые использовались при обсуждении восстанавливающей силы выше. Вы могли вспомнить из этого обсуждения, что позиции A и E были положениями, в которых масса имела нулевую скорость. Положение C было положением равновесия и положением максимальной скорости. Если бы тот же датчик движения, который собирал данные о местоположении и времени, использовался для сбора данных о скорости и времени, то нанесенные на график данные выглядели бы, как на графике ниже.
Если бы тот же датчик движения, который собирал данные о местоположении и времени, использовался для сбора данных о скорости и времени, то нанесенные на график данные выглядели бы, как на графике ниже.
Обратите внимание, что график зависимости скорости от времени для массы на пружине также является графиком синусоидальной формы. Единственная разница между графиками положение-время и скорость-время состоит в том, что один смещен на одну четверть колебательного цикла от другого. Также обратите внимание на графики, что абсолютное значение скорости является наибольшим в положении C (соответствующем положению равновесия). Скорость любого движущегося объекта, независимо от того, вибрирует он или нет, — это скорость с направлением.Величина скорости — это скорость. Направление часто выражается как положительный или отрицательный знак. В некоторых случаях скорость имеет отрицательное направление (планер движется влево), и его скорость отображается под осью времени. В других случаях скорость имеет положительное направление (планер движется вправо), и его скорость откладывается над временной осью. Вы также заметите, что скорость равна нулю, когда положение находится в крайнем положении. Это происходит в положениях A и E, когда планер начинает менять направление.Так же, как и в случае движения маятника, скорость наибольшая, когда смещение массы относительно ее положения равновесия наименьшее. И скорость наименьшая, когда смещение массы относительно положения равновесия наибольшее.
Энергетический анализ массы на пружине На предыдущей странице обсуждался энергетический анализ колебаний маятника. Здесь мы проведем аналогичный анализ для движения массы на пружине.В нашем обсуждении мы будем ссылаться на движение планера без трения по воздушной трассе, о котором говорилось выше. Планер будет отведен вправо от положения равновесия и выведен из состояния покоя (положение A). Как уже упоминалось, планер затем разгоняется до положения C (положения равновесия). Как только параплан проходит положение равновесия, он начинает замедляться, поскольку сила пружины тянет его назад против его движения. К тому времени, как он достиг положения E, планер замедлился до кратковременной паузы перед изменением направления и ускорением обратно в положение C.И снова, после того, как параплан проходит позицию C, он начинает замедляться по мере приближения к позиции A. Когда он достигает позиции A, цикл начинается снова … и снова … и снова.
Как только параплан проходит положение равновесия, он начинает замедляться, поскольку сила пружины тянет его назад против его движения. К тому времени, как он достиг положения E, планер замедлился до кратковременной паузы перед изменением направления и ускорением обратно в положение C.И снова, после того, как параплан проходит позицию C, он начинает замедляться по мере приближения к позиции A. Когда он достигает позиции A, цикл начинается снова … и снова … и снова.
Кинетическая энергия, которой обладает объект, — это энергия, которой он обладает благодаря своему движению. Это количество зависит как от массы, так и от скорости. Уравнение, связывающее кинетическую энергию (KE) с массой (m) и скоростью (v), равно
.KE = ½ • м • v 2
Чем быстрее движется объект, тем большей кинетической энергией он будет обладать.Мы можем объединить эту концепцию с обсуждением выше, как скорость изменяется в ходе движения. Такое смешение концепций привело бы нас к выводу, что кинетическая энергия массы на пружине увеличивается по мере приближения к положению равновесия; и уменьшается по мере удаления от положения равновесия.
Эта информация обобщена в таблице ниже:
Стадия цикла | Изменение скорости | Изменение кинетической энергии |
от A до B до C | Увеличение | Увеличение |
C по D по E | Уменьшение | Уменьшение |
от E до D до C | Увеличение | Увеличение |
от C до B до A | Уменьшение | Уменьшение |
Кинетическая энергия — это только одна из форм механической энергии.Другая форма — потенциальная энергия. Потенциальная энергия — это запасенная энергия положения объекта. Потенциальная энергия может быть гравитационной потенциальной энергией, и в этом случае положение относится к высоте над землей. Или потенциальная энергия может быть упругой потенциальной энергией, и в этом случае положение относится к положению массы на пружине относительно положения равновесия. У нашего вибрационного грейдера нет изменения высоты. Таким образом, гравитационная потенциальная энергия не меняется.Эта форма потенциальной энергии не представляет особого интереса для нашего анализа изменений энергии. Однако происходит изменение положения массы относительно ее положения равновесия. Каждый раз, когда пружина сжимается или растягивается относительно ее расслабленного положения, происходит увеличение упругой потенциальной энергии. Количество упругой потенциальной энергии зависит от степени растяжения или сжатия пружины. Уравнение, которое связывает количество упругой потенциальной энергии (PEspring) с величиной сжатия или растяжения (x), равно
.PE пружина = ½ • k • x 2
где k — жесткость пружины (в Н / м), а x — расстояние, на которое пружина растягивается или сжимается относительно расслабленного, нерастянутого положения.
Когда планер с воздушной гусеницей находится в положении равновесия (положение C), он движется быстрее всех (как обсуждалось выше). В этой позиции значение x равно 0 метру. Таким образом, величина упругой потенциальной энергии (PEspring) равна 0 Джоулей. Это положение, где потенциальная энергия наименьшая. Когда параплан находится в положении А, пружина растягивается на наибольшее расстояние, а потенциальная энергия упругости максимальна. Аналогичное утверждение можно сделать для положения E. В положении E пружина сжимается сильнее всего, и потенциальная энергия упругости в этом месте также максимальна.Поскольку пружина как растягивается, так и сжимается, упругая потенциальная энергия в положении A (положение при растяжении, положение ) такая же, как и в положении E (положение при сжатии, положение ). В этих двух положениях — A и E — скорость равна 0 м / с, а кинетическая энергия равна 0 Дж. Таким образом, как и в случае с вибрирующим маятником, вибрирующая масса на пружине имеет наибольшую потенциальную энергию, когда она имеет наименьшее значение. кинетическая энергия. И он также имеет наименьшую потенциальную энергию (положение C), когда имеет наибольшую кинетическую энергию.Эти принципы показаны на анимации ниже.
При проведении энергетического анализа обычно используется столбчатая диаграмма энергии. Столбиковая диаграмма энергии использует гистограмму для представления относительного количества и формы энергии, которой обладает объект во время его движения. Это полезный концептуальный инструмент, показывающий, какая форма энергии присутствует и как она изменяется с течением времени. На приведенной ниже диаграмме представлена гистограмма энергопотребления планера с воздушной гусеницей и пружинной системы.
Гистограмма показывает, что по мере того, как масса на пружине перемещается от A к B к C, кинетическая энергия увеличивается, а потенциальная энергия упругости уменьшается. Однако общее количество этих двух форм механической энергии остается постоянным. Механическая энергия трансформируется из потенциальной формы в кинетическую; но общее количество составляет , сохранено . Подобное явление сохранения энергии происходит, когда масса перемещается от C к D к E. Когда пружина сжимается, а масса замедляется, ее кинетическая энергия преобразуется в упругую потенциальную энергию.Когда это преобразование происходит, общее количество механической энергии сохраняется. Сам этот принцип сохранения энергии был объяснен в предыдущей главе — главе «Энергия» — учебного пособия по физике.
Очевидно, что не все пружины одинаковы. И не все пружинно-массовые системы одинаковы. Одной измеримой величиной, которая может использоваться для отличия одной системы пружин-масса от другой, является период.Как обсуждалось ранее в этом уроке, период — это время, за которое вибрирующий объект совершает один полный цикл вибрации. Переменными, которые влияют на период системы пружина-масса, являются масса и жесткость пружины. Уравнение, связывающее эти переменные, напоминает уравнение для периода маятника. Уравнение
T = 2 • Π • (м / к) ,5
где T — период, m — масса объекта, прикрепленного к пружине, а k — жесткость пружины.Уравнение можно интерпретировать как означающее, что более массивные объекты будут колебаться с более длительным периодом. Их большая инерция означает, что для завершения цикла требуется больше времени. А пружины с большей жесткостью пружины (более жесткие пружины) имеют меньший период; массы, прикрепленные к этим пружинам, требуют меньше времени для завершения цикла. Их большая жесткость пружины означает, что они оказывают более сильные восстанавливающие силы на прикрепленную массу. Эта большая сила сокращает время, необходимое для завершения одного цикла вибрации.
С нетерпением жду урока 2Как мы видели в этом уроке, вибрирующие объекты шевелятся на месте . Они колеблются вперед и назад в фиксированном положении. Простой маятник и груз на пружине — классические примеры такого колебательного движения. Хотя это и не очевидно при простом наблюдении, использование детекторов движения показывает, что колебания этих объектов имеют синусоидальную природу. Существует тонкое волнообразное поведение, связанное с тем, как положение и скорость меняются во времени.В следующем уроке мы исследуем волны. Как мы скоро узнаем, если масса на пружине представляет собой покачивание во времени , то волна представляет собой набор из вигглера, распространяющегося в пространстве . Когда мы начнем изучение волн в Уроке 2, концепции частоты, длины волны и амплитуды останутся важными.
Мы хотели бы предложить … Зачем просто читать об этом и когда можно с этим взаимодействовать? Взаимодействовать — это именно то, что вы делаете, когда используете одно из интерактивных материалов The Physics Classroom.Мы хотели бы предложить вам совместить чтение этой страницы с использованием нашей Mass on Spring Interactive. Вы можете найти его в разделе Physics Interactives на нашем сайте. Интерактивное приложение «Масса на пружине» предоставляет учащемуся простую среду для изучения влияния массы, жесткости пружины и продолжительности движения на период и амплитуду вертикально колеблющейся массы.
1.Чтобы растянуть пружину на расстояние 40 см от ее исходного положения, требуется усилие 16 Н. Какая сила (в Ньютонах) требуется, чтобы растянуть ту же пружину…
а. … Вдвое большее расстояние?
б. … В три раза больше расстояния?
c. … Половина расстояния?
2. Постоянно обеспокоенный привычкой белок на заднем дворе совершать набеги на его кормушки, мистер Х. решает применить немного физики для лучшей жизни. Его нынешний план включает в себя оснащение кормушки для птиц пружинной системой, которая растягивается и колеблется, когда масса белки приземляется на кормушку.Он хочет иметь максимальную возможную амплитуду вибрации. Должен ли он использовать пружину с большой жесткостью пружины или с небольшой жесткостью пружины?
3. Ссылаясь на предыдущий вопрос. Если г-н Х желает, чтобы его кормушка для птиц (и прикрепленная к нему белка) вибрировала с максимально возможной частотой, следует ли ему использовать пружину с большой жесткостью пружины или небольшой жесткостью пружины?
4. Воспользуйтесь функцией энергосбережения, чтобы заполнить пробелы на следующей диаграмме.
5. Какая из следующих систем масс-пружина будет иметь самую высокую частоту вибрации?
Вариант А. Подвешенная на ней пружина с k = 300 Н / м и массой 200 г.
Случай B. Пружина с k = 400 Н / м и массой 200 г. подвешена на ней.
6. Какая из следующих систем масса-пружина будет иметь самую высокую частоту вибрации?
Вариант А. Подвешенная на ней пружина с k = 300 Н / м и массой 200 г.
Случай B. Пружина с k = 300 Н / м и массой 100 г подвешена на ней.
Простое гармоническое движение: особое периодическое движение
Цели обучения
К концу этого раздела вы сможете:
- Опишите простой гармонический осциллятор.
- Объясните связь между простым гармоническим движением и волнами.
Колебания системы, в которой результирующая сила может быть описана законом Гука, имеют особое значение, потому что они очень распространены. Это также простейшие колебательные системы. Простое гармоническое движение (SHM) — это название, данное колебательному движению для системы, в которой результирующая сила может быть описана законом Гука, и такая система называется простым гармоническим осциллятором . Если результирующая сила может быть описана законом Гука и нет демпфирования (за счет трения или других неконсервативных сил), то простой гармонический осциллятор будет колебаться с одинаковым смещением по обе стороны от положения равновесия, как показано для объект на пружине на рисунке 1.Максимальное смещение от равновесия называется амплитудой X . Единицы измерения амплитуды и смещения одинаковы, но зависят от типа колебаний. Для объекта на пружине единицы измерения амплитуды и перемещения — метры; тогда как для звуковых колебаний у них есть единицы давления (а для других типов колебаний есть еще другие единицы). Поскольку амплитуда — это максимальное смещение, она связана с энергией колебаний.
Рисунок 1.Предмет, прикрепленный к пружине, скользящей по поверхности без трения, представляет собой несложный простой гармонический осциллятор. При смещении из состояния равновесия объект совершает простое гармоническое движение с амплитудой X и периодом T . Максимальная скорость объекта достигается при прохождении через равновесие. Чем жестче пружина, тем меньше период T . Чем больше масса объекта, тем больше период T .
Эксперимент на вынос: SHM и мрамор
Найдите миску или таз, имеющий изнутри форму полусферы.Поместите мрамор внутрь чаши и периодически наклоняйте чашу, чтобы мрамор катился со дна чаши к одинаково высоким точкам по бокам чаши. Почувствуйте силу, необходимую для поддержания этого периодического движения. Что такое восстанавливающая сила и какую роль эта сила играет в простом гармоническом движении (SHM) шарика?
Что такого значительного в простом гармоническом движении? Одна особенность заключается в том, что период T и частота f простого гармонического осциллятора не зависят от амплитуды.Струна гитары, например, будет колебаться с одной и той же частотой независимо от того, мягко она или сильно щипает. Поскольку период постоянен, в качестве часов можно использовать простой гармонический осциллятор.
Два важных фактора действительно влияют на период простого гармонического осциллятора. Период связан с тем, насколько жесткая система. Очень жесткий объект имеет большую постоянную силы k , что приводит к тому, что система имеет меньший период. Например, вы можете отрегулировать жесткость трамплина — чем она жестче, тем быстрее она вибрирует и тем короче ее период.Период также зависит от массы колебательной системы. Чем массивнее система, тем больше период. Например, тяжелый человек на трамплине подпрыгивает вверх и вниз медленнее, чем легкий.
Фактически, масса m и силовая постоянная k являются факторами только , которые влияют на период и частоту простого гармонического движения.
Период простого гармонического осциллятора
Период простого гармонического осциллятора равен
[латекс] T = 2 \ pi \ sqrt {\ frac {m} {k}} \\ [/ latex]
и, поскольку [latex] f = \ frac {1} {T} \\ [/ latex], частота простого гармонического осциллятора равна
[латекс] f = \ frac {1} {2 \ pi} \ sqrt {\ frac {k} {m}} \\ [/ latex].
Обратите внимание, что ни T , ни f не зависят от амплитуды.
Эксперимент на вынос: колебания массы и линейки
Найдите две одинаковые деревянные или пластиковые линейки. Плотно приклейте один конец каждой линейки к краю стола так, чтобы длина каждой линейки, выступающей из стола, была одинаковой. На свободный конец одной линейки прикрепите тяжелый предмет, например несколько крупных монет. Выщипывайте концы линейок одновременно и наблюдайте, какая из них претерпевает больше циклов за период времени, и измерьте период колебаний каждой из линейок.
Пример 1. Расчет частоты и периода колебаний: плохие амортизаторы в автомобиле
Если амортизаторы в автомобиле выходят из строя, то автомобиль будет раскачиваться при малейшей провокации, например, при наезде на неровности дороги и после остановки (см. Рисунок 2). Вычислите частоту и период этих колебаний для такого автомобиля, если масса автомобиля (включая его груз) составляет 900 кг, а силовая постоянная ( k ) подвески составляет 6,53 × 10 4 Н / м.
Рис. 2. Подпрыгивающая машина совершает волнообразное движение. Если восстанавливающая сила в системе подвески может быть описана только законом Гука, тогда волна является синусоидальной функцией. (Волна — это след от фары при движении автомобиля вправо.)
Стратегия
Частота колебаний автомобиля будет соответствовать частоте простого гармонического осциллятора, как указано в уравнении [latex] f = \ frac {1} {2 \ pi} \ sqrt {\ frac {k} {m}} \\ [ /латекс]. Приведены как масса, так и силовая постоянная.{-1} = 1,36 \ text {Hz} \\ [/ latex]
Вы можете использовать [latex] T = 2 \ pi \ sqrt {\ frac {m} {k}} \\ [/ latex] для вычисления периода, но проще использовать соотношение [latex] T = \ frac {1} {f} \\ [/ latex] и подставьте только что найденное значение вместо f :
[латекс] \ displaystyle {T} = \ frac {1} {f} = \ frac {1} {1.356 \ text {Hz}} = 0,738 \ text {s} \\ [/ latex]
Обсуждение
Значения T и f кажутся подходящими для подпрыгивающего автомобиля. Вы можете наблюдать эти колебания, если сильно надавите на конец автомобиля и отпустите.
Связь между простым гармоническим движением и волнами
Рис. 3. Вертикальное положение объекта, подпрыгивающего на пружине, записывается на полоске движущейся бумаги, оставляя синусоидальную волну.
Если бы была сделана фотография прыгающего автомобиля с выдержкой времени, когда он проезжал мимо, фара образовала бы волнообразную полосу, как показано на рисунке 2. Точно так же на рисунке 3 показан объект, подпрыгивающий на пружине, оставляющий волнообразный «след». своего положения на движущейся полосе бумаги. Обе волны являются синусоидальными функциями.Все простые гармонические движения тесно связаны с синусоидальными и косинусоидальными волнами.
Смещение как функция времени t при любом простом гармоническом движении, то есть таком, в котором результирующая восстанавливающая сила может быть описана законом Гука, определяется как
[латекс] x (t) = X \ cos \ frac {2 \ pi {t}} {T} \\ [/ latex],
, где X — амплитуда. При t = 0, начальное положение равно x 0 = X , а смещение колеблется назад и вперед с периодом T . (когда t = T , мы снова получаем x = X , потому что cos 2π = 1.). Кроме того, из этого выражения для x скорость v как функция времени определяется как
[латекс] v (t) = — v _ {\ text {max}} \ sin \ left (\ frac {2 \ pi {t}} {T} \ right) \\ [/ latex], где [латекс] v _ {\ text {max}} = \ frac {2 \ pi {X}} {T} = X \ sqrt {\ frac {k} {m}} \\ [/ latex].
Объект имеет нулевую скорость при максимальном смещении — например, v = 0, когда t = 0, и в это время x = X .Знак минус в первом уравнении для v ( t ) указывает правильное направление скорости. Например, сразу после начала движения скорость отрицательна, потому что система движется обратно к точке равновесия. Наконец, мы можем получить выражение для ускорения, используя второй закон Ньютона. [Тогда у нас есть x ( t ), v ( t ), t и a ( t ), величины, необходимые для кинематики и описания простого гармонического движения.] Согласно второму закону Ньютона, ускорение равно [latex] a = \ frac {F} {m} = \ frac {kx} {m} \\ [/ latex] . Итак, a ( t ) также является функцией косинуса:
[латекс] a (t) = — \ frac {kX} {m} \ cos \ frac {2 \ pi {t}} {T} \\ [/ latex].
Следовательно, a ( t ) прямо пропорционален и в противоположном направлении к a ( t ).
На рисунке 4 показано простое гармоническое движение объекта на пружине и представлены графики x ( t ), v ( t ) и a ( t ) в зависимости от времени.
Рис. 4. Графики зависимости t от движения объекта на пружине. Суммарная сила, действующая на объект, может быть описана законом Гука, поэтому объект совершает простое гармоническое движение. Обратите внимание, что исходное положение имеет максимальное значение вертикального смещения X ; v сначала равно нулю, а затем отрицательно по мере движения объекта; и начальное ускорение отрицательное, возвращается к положению равновесия и становится нулевым в этой точке.
Наиболее важным моментом здесь является то, что эти уравнения математически просты и справедливы для всех простых гармонических движений.Они очень полезны при визуализации волн, связанных с простым гармоническим движением, включая визуализацию того, как волны складываются друг с другом.
Проверьте свое понимание
Часть 1
Предположим, вы взяли струну банджо. Вы слышите одну ноту, которая начинается вслух и постепенно затихает. Опишите, что происходит со звуковыми волнами с точки зрения периода, частоты и амплитуды по мере уменьшения громкости звука.
Решение
Частота и период практически не изменились.При уменьшении громкости уменьшается только амплитуда.
Часть 2
Няня толкает ребенка на качелях. В точке, где размах достигает x , где будет расположена соответствующая точка на волне этого движения?
Решение
x — максимальная деформация, соответствующая амплитуде волны. Точка на волне будет либо на самом верху, либо на самом низу кривой.
Исследования PhET: массы и пружины
Реалистичная лаборатория масс и пружин.Подвесьте массы к пружинам и отрегулируйте жесткость и демпфирование пружины. Вы даже можете замедлить время. Перенесите лабораторию на разные планеты. На диаграмме показана кинетическая, потенциальная и тепловая энергия каждой пружины.
Щелкните, чтобы запустить моделирование.
Избранные решения
- Простое гармоническое движение — это колебательное движение для системы, которое можно описать только законом Гука. Такую систему еще называют простым гармоническим осциллятором.
- Максимальное смещение — это амплитуда X .Период T и частота f простого гармонического осциллятора задаются формулами [latex] T = 2 \ pi \ sqrt {\ frac {m} {k}} \\ [/ latex] и [latex] f = \ frac {1} {2 \ pi} \ sqrt {\ frac {k} {m}} \\ [/ latex], где м — масса системы.
- Смещение в простом гармоническом движении как функция времени определяется как [latex] x \ left (t \ right) = X \ text {cos} \ frac {2 \ pi {t}} {T} \\ [/ latex ].
- Скорость определяется как [латекс] v \ left (t \ right) = — {v} _ {\ text {max}} \ text {sin} \ frac {2 \ pi {t}} {T} \\ [/ latex], где [latex] {v} _ {\ text {max}} = \ sqrt {\ frac {k} {m}} X \\ [/ latex].
- Ускорение составляет [латекс] a (t) = — \ frac {kX} {m} \ cos \ frac {2 \ pi {t}} {T} \\ [/ latex].
Концептуальные вопросы
- Какие условия должны быть выполнены для создания простого гармонического движения?
- (a) Если частота не постоянна для некоторого колебания, может ли колебание быть простым гармоническим движением? б) Можете ли вы привести примеры гармонического движения, в котором частота может зависеть от амплитуды?
- Приведите пример простого гармонического осциллятора, особо отметив, что его частота не зависит от амплитуды.
- Объясните, почему вы ожидаете, что объект, сделанный из жесткого материала, будет вибрировать с большей частотой, чем аналогичный объект, сделанный из губчатого материала.
- Когда вы проезжаете грузовой автомобиль с прицепом по шоссе, вы замечаете, что его прицеп медленно подпрыгивает вверх и вниз. Более вероятно, что прицеп сильно загружен или почти пустой? Поясните свой ответ.
- Некоторые люди модифицируют автомобили, чтобы они были намного ближе к земле, чем когда они были изготовлены. Стоит ли устанавливать более жесткие пружины? Поясните свой ответ.
Задачи и упражнения
- Тип часов с кукушкой отслеживает время, заставляя массу подпрыгивать на пружине, обычно что-то милое, вроде херувима в кресле. Какая силовая постоянная необходима для получения периода 0,500 с для массы 0,0150 кг?
- Если жесткость пружины простого гармонического осциллятора увеличится вдвое, на какой коэффициент необходимо изменить массу системы, чтобы частота движения оставалась прежней?
- Груз весом 0,500 кг, подвешенный на пружине, колеблется с периодом 1.50 с. Какую массу нужно добавить к объекту, чтобы изменить период до 2,00 с?
- Насколько велика свобода выбора (как в процентах, так и по массе) при выборе массы объекта в предыдущей задаче, если вы не хотите, чтобы новый период был больше 2,01 с или меньше 1,99 с?
- Предположим, вы прикрепляете объект массой м к вертикальной пружине, первоначально находящейся в состоянии покоя, и позволяете ему подпрыгивать вверх и вниз. Вы высвобождаете объект из состояния покоя на исходной длине упора пружины.(а) Покажите, что пружина оказывает на объект восходящую силу 2,00 мг в его самой нижней точке. (b) Если пружина имеет силовую постоянную 10,0 Н / м и объект массой 0,25 кг приводится в движение, как описано, найдите амплитуду колебаний. (c) Найдите максимальную скорость.
- Дайвер на трамплине совершает простое гармоническое движение. Ее масса 55,0 кг, период движения 0,800 с. Следующий дайвер — мужчина, период простых гармонических колебаний которого составляет 1,05 с. Какова его масса, если масса доски ничтожна?
- Предположим, что доска для прыжков в воду, на которой никого нет, подпрыгивает вверх и вниз, совершая простое гармоническое движение с частотой 4.00 Гц. Доска имеет полезную массу 10,0 кг. Какова частота простого гармонического движения дайвера весом 75,0 кг на доске?
- Устройство, изображенное на рис. 6, развлекает младенцев, не позволяя им блуждать. Ребенок подпрыгивает в ремне безопасности, подвешенном к дверной коробке с помощью пружины.
Рис. 6. В этой детской игрушке используются пружины, чтобы развлекать младенцев. (Источник: Humboldthead, Flickr)
(a) Если пружина растягивается на 0,250 м, поддерживая 8.Ребенок 0 кг, какова его пружинная постоянная? б) Сколько времени на один полный прыжок этого ребенка? (c) Какова максимальная скорость ребенка, если амплитуда его прыжка составляет 0,200 м?
- Парашютист весом 90,0 кг, подвешенный на парашюте, подпрыгивает вверх и вниз с периодом 1,50 с. Каков новый период колебаний, когда второй парашютист массой 60,0 кг свисает с ног первого, как показано на рисунке 7.
Рис. 7. На колебания одного парашютиста вот-вот повлияет второй парашютист.(Источник: армия США, www.army.mil)
Глоссарий
амплитуда: максимальное смещение от положения равновесия объекта, колеблющегося вокруг положения равновесия
простое гармоническое движение: колебательное движение в системе, где результирующая сила может быть описана законом Гука
простой гармонический осциллятор: устройство, реализующее закон Гука, такое как масса, прикрепленная к пружине, при этом другой конец пружины соединен с жесткой опорой, такой как стена.
Избранные решения проблем и упражнения
1.2,37 Н / м
3. 0,389 кг
6. 94,7 кг
9. 1.94 с
свободных колебаний
свободных колебаний Вибрации или колебания очень важны в физике и технике. Ты столкнуться с механической вибрацией, когда ваш автомобиль наезжает на неровность дороги. Электрические колебания также важны: например, в радиоприемнике. Просто система, в которой мы можем изучать эти явления, состоит из массы подвешивается пружиной к жесткой опоре.Гравитация действует с силой вниз по массе.При перемещении массы вниз пружина растягивается, и согласно закону Гука пружина оказывает противоположное направление, пропорциональное на величину растяжения. Жесткость пружины — это сила на единицу растяжения (положительное число). Масса может висеть неподвижно в определенном положении равновесия, при котором силы тяжести и пружина уравновешены:, где это величина растяжения. Мы принимаем это положение равновесия как происхождение нашей системы координат: наша зависимая переменная — смещение массы от положения равновесия.Бойс и ДиПрима берут нисходящий смещение как положительное, но я всегда предпочитаю воспринимать как положительный.
Теперь, если масса перемещается, сила пружины равна
пока гравитация неподвижна, а чистая сила равна. Если нет другого
сил, действующих на массу, по второму закону Ньютона получаем дифференциал
уравнение
(где независимая переменная — время). Это уравнение описывает свободные незатухающие колебания. Это линейное однородное уравнение с постоянными коэффициентами.Как мы увидим, движение носит периодический характер: оно продолжается вечно, повторяется в регулярные промежутки.
В большинстве реальных ситуаций на массу действуют другие силы, которые
имеют тенденцию сопротивляться движению и в конечном итоге могут привести к его исчезновению. Для
Например, вероятно, есть сопротивление воздуха. Или какой-то демпфирующий механизм
могут быть введены намеренно (например, амортизаторы вашего автомобиля).
Что бы ни создавало эту демпфирующую силу, мы предполагаем, что она пропорциональна
скорости и в обратном направлении, с положительной постоянной
измерение
сила на единицу скорости.Тогда дифференциальное уравнение принимает вид
Это уравнение описывает свободные затухающие колебания.
Также может быть внешняя сила, которая может зависеть от времени, но не от
или его производные. Если эта сила равна, уравнение имеет вид
Это уравнение вынужденных затухающих колебаний (или незатухающих, если сделать ). Например, внешняя сила может быть приложена путем перемещения опоры на вершина весны. Если — величина смещения верхней части пружина, это создает силу на массу.
Подобные уравнения управляют колебаниями в электрических цепях. Рассмотрим источник напряжения, резистор, катушка индуктивности и конденсатор последовательно.
Если это
ток в цепи, падение напряжения на резисторе составляет и
что через катушку индуктивности, где — сопротивление, а
индуктивность. Падение напряжения на емкостном конденсаторе составляет
где — заряд конденсатора. Сейчас (текущий
оценка
потока заряда), поэтому полное падение напряжения на резисторе, катушке индуктивности и
конденсатор
.Это должно быть равно напряжению на
источник, скажем. Имеем дифференциальное уравнение
который имеет ту же форму, что и для механических вынужденных, затухающих колебаний (соответствует, к, к, к и к). Мы сконцентрируемся на механических системах, но все применимо к электрические.
Свободные незатухающие колебания
Характеристическое уравнение имеет мнимые корни где . Фундаментальный набор решений является и , которые являются реальными и воображаемыми части .Общее решение можно записать как . Решение периодическое, с период : это значит, что для всех. Мы называем угловой или круговой частотой.
Другой способ написать решения исходят из комплексного решения (где — любая комплексная постоянная). Запишите в его полярном представлении как где и это реально. Затем . Настоящая часть из, который также является решением, является . называется амплитудой раствор и фаза. Обратите внимание, что варьируется от до, с когда для любого целого числа.
Конечно, это просто еще один способ написать такие же общие решения. Используя тригонометрическое тождество для косинуса разности, так и .
Свободно демпфированные колебания
Характеристическое уравнение имеет корни
Есть три случая, в зависимости от признака .
- (случай с избыточным демпфированием) Если
, корни оба настоящие.
Они отрицательные,
поскольку
. Если мы назовем корни и
, общее решение
Колебания нет: может сменить знак не более одного раза.На рисунке ниже показано одно решение с,,.Щелкните изображение, чтобы просмотреть анимацию.
- (случай с критическим демпфированием) Если
, есть двойная реальность
корень в. Общее решение
Опять нет колебаний. Я не предоставил изображение для этого случая, потому что он очень похож на предыдущий. - (корпус с недостаточным демпфированием) Если
, есть пара сложных
корни в
.
Таким образом
Фундаментальный набор решений и .Мы также можем написать общее решение как . Это колеблется между и . Вы можете думать об этом как о косинус с экспоненциально убывающей амплитудой. называется квазичастота. Это не настоящая угловая частота, потому что движение не повторяется точно. Вместо этого он повторяется с меньшей амплитудой:
где — квазипериод. Обратите внимание, что меньше угловой частоты что система будет иметь без демпфирования.На рисунке ниже показано решение с,,, в результате и.Квазипериод .
Щелкните изображение, чтобы просмотреть анимацию.
Роберт Исраэль
17 февраля 2002
Lab 7 — Простое гармоническое движение
Введение
Вы когда-нибудь задумывались, почему напольные часы показывают точное время? Движение маятника — это особый вид повторяющегося или периодического движения, называемого простым гармоническим движением или SHM.Положение колеблющегося объекта изменяется синусоидально со временем. Многие объекты колеблются взад и вперед. Движение ребенка на качелях можно представить себе как синусоидальное и, следовательно, можно рассматривать как простое гармоническое движение. Некоторые сложные движения, такие как турбулентные волны на воде, не считаются простым гармоническим движением. Когда объект находится в простом гармоническом движении, можно легко определить скорость, с которой он колеблется вперед и назад, а также его положение относительно времени.В этой лабораторной работе вы проанализируете простой маятник и систему пружина-масса, которые демонстрируют простое гармоническое движение.Обсуждение принципов
Частица, которая колеблется вертикально в простом гармоническом движении, перемещается вверх и вниз между двумя крайними точками y = ± A . Максимальное смещение A называется амплитудой . Это движение графически показано на графике зависимости положения от времени на рис.1.Рисунок 1 : Позиционный график, показывающий синусоидальное движение объекта в SHM
Одно полное колебание или цикл или колебание — это движение, например, отy = −A
доy = + A
и обратно доy = −A.
Временной интервал T , необходимый для завершения одного колебания, называется периодом . Связанная величина — частота f , которая представляет собой количество колебаний, которые система делает за единицу времени. Частота обратно пропорциональна периоду и измеряется в герцах, сокращенно Гц;1 Гц = 1 с −1 .
Если частица колеблется вдоль оси y , ее положение на оси y в любой момент времени t , измеренное от начала колебания, определяется уравнением Напомним, что скорость объекта — это первая производная, а ускорение — вторая производная функции смещения по времени.Скорость v и ускорение a частицы в момент времени t задаются формулами(3)
v = 2 π fA cos (2 π фут)
(4)
a = — (2 π f) 2 [A sin (2 π ft)]
Обратите внимание, что скорость и ускорение также синусоидальны. Однако функция скорости имеет разность фаз 90 ° или π /2, в то время как функция ускорения имеет разность фаз 180 ° или π относительно функции смещения.Например, когда смещение является положительным максимумом, скорость равна нулю, а ускорение — отрицательному максимуму. Подставляя из уравнения. (1)f = 1 / T
в уравнение. (4)a = — (2 π f) 2 [A sin (2 π ft)]
дает Из уравнения. (5)a = −4 π 2 f 2 y
мы видим, что ускорение объекта в SHM пропорционально смещению и противоположно по знаку. Это основное свойство любого объекта, совершающего простое гармоническое движение.Рассмотрим несколько критических точек в цикле, как в случае колебательной системы пружина-масса. Система пружина-масса состоит из массы, прикрепленной к концу пружины, подвешенной на стойке. Масса слегка опускается и отпускается, чтобы заставить пружину и массу колебаться в вертикальной плоскости. На рисунке 2 показаны пять критических точек, когда нагрузка на пружину проходит полный цикл. Положение равновесия для системы пружина-масса — это положение массы, когда пружина не растягивается и не сжимается.Рисунок 2 : Пять ключевых точек массы, колеблющейся на пружине.
Масса завершает полный цикл, переходя из положения A в положение E. Описание каждой позиции следующее:- Положение A: пружина сжата; масса выше точки равновесия на
y =
A и вот-вот будет выпущена. - Положение B: Масса движется вниз, проходя через точку равновесия.
- Положение C: Груз на мгновение находится в состоянии покоя в самой нижней точке перед тем, как начать движение вверх.
- Положение D: Масса движется вверх, проходя через точку равновесия.
- Положение E: гиря на мгновение находится в состоянии покоя в наивысшей точке, прежде чем снова двинуться вниз.
| Положение | Скорость | Ускорение | |||
| Точка A | отриц. Макс. | ноль | макс. | ||
| Точка B | ноль | макс. C | , макс. | ноль | , макс. |
| Точка D | , ноль | , макс. | ноль | ||
| Точка E | , макс. | ноль | , макс. |
Рисунок 3 : Положение, скорость и ускорение в зависимости отвремя
Для этого конкретного начального условия (начальное положение в точке A на рис.2) кривая положения является функцией косинуса (фактически отрицательной функцией косинуса), кривая скорости является функцией синуса, а кривая ускорения является просто отрицательной функцией положения. изгиб.Масса и пружина
Масса, подвешенная на конце пружины, растянет ее на некоторое расстояние х . Сила, с которой пружина тянет вверх груз, определяется по закону Гук ‘ s закон где k, — жесткость пружины, а y — растяжение пружины, когда к пружине прикладывается сила F .Константа пружины k является мерой жесткости пружины. Жесткость пружины может быть определена экспериментально, если позволить грузу неподвижно висеть на пружине, а затем добавить дополнительную массу и записать дополнительное растяжение пружины, как показано ниже. На рис. 4а подвеска груза подвешена к концу пружины. На рис. 4b к подвеске добавлена дополнительная масса, и теперь пружина выдвигается на величинуΔy
. Эта экспериментальная установка также показана на фотографии установки на рис.5.Рисунок 4 : Настройка для определения жесткости пружины
Рисунок 5 : Фотография установки для определения жесткости пружины
Когда масса неподвижна, ее ускорение равно нулю. Следовательно, согласно второму закону Ньютона результирующая сила должна быть равна нулю. На массу действуют две силы; сила тяжести, направленная вниз, и сила пружины, направленная вверх. См. Диаграмму свободного тела на рис.6 ниже.Рисунок 6 : Схема свободного тела для системы пружина-масса
Итак, второй закон Ньютона дает нам гдеΔm
— изменение массы,Δy
— изменение растяжения пружины, вызванное изменением массы, г, — ускорение свободного падения, а k — жесткость пружины. Уравнение (7)Δmg — kΔy = 0
также можно выразить как Второй закон Ньютона, примененный к этой системе, равенma = F = −ky.
Заменить из ур. (5)a = −4 π 2 f 2 y
для получения ускорения(9)
м (−4 π 2 f 2 y) = −ky
откуда получаем выражение для частоты f и периода T .(10)
f =(11)
Т = 2 πT 2
от м будет прямой, а жесткость пружины можно определить по наклону.Простой маятник
Другой пример простого гармонического движения, который вы исследуете, — это простой маятник . Простой маятник состоит из массы м , называемой бобом маятника, прикрепленной к концу веревки.Длина L простого маятника измеряется от точки подвешивания струны до центра боба, как показано на Рис. 7 ниже.Рисунок 7 : Экспериментальная установка для простого маятника
Если боб перемещен из положения покоя на некоторый угол смещения θ , как показано на рис. 7, возвращающая сила вернет боб обратно в положение равновесия. Силы, действующие на боб, — это сила тяжести и сила натяжения струны.Сила натяжения струны уравновешивается составляющей силы тяжести, которая соответствует струне (то есть перпендикулярна движению боба). Возвращающей силой здесь является тангенциальная составляющая гравитационной силы.Рисунок 8 : Простой маятник
Когда мы применяем тригонометрию к меньшему треугольнику на рис. 8, мы получаем величину возвращающей силы | F | = мг sin θ . Эта сила зависит от массы боба, ускорения свободного падения g и синуса угла, на который натянута струна.Снова должен применяться второй закон Ньютона, поэтому(13)
ma = F = −mg sin θ
где отрицательный знак означает, что возвращающая сила действует противоположно направлению движения боба. Поскольку боб движется по дуге окружности, угловое ускорение определяется какα = a / L.
Из уравнения. (13)ma = F = −mg sin θ
получаем На рис. 9 синяя сплошная линия представляет собой график зависимости θ от sin ( θ ), а прямая линия представляет собой график θ в градусах по сравнению с θ в радианах.Для малых углов эти две кривые почти неразличимы. Следовательно, пока смещение θ мало, мы можем использовать приближение sin θ ≅ θ .Рисунок 9 : Графики sin θ в сравнении с θ
В этом приближении уравнение. (14) становится Уравнение (15) показывает, что (угловое) ускорение пропорционально отрицательному значению (углового) смещения, и поэтому движение боба является простым гармоническим, и мы можем применить уравнение.(5)a = −4 π 2 f 2 y
, чтобы получить Комбинируя уравнение. (15) и уравнение. (16)α = −4 π 2 f 2 θ
, и, упрощая, получаем(17)
f =(18)
Т = 2 πЦель
Цель этой лабораторной работы — понять поведение объектов, находящихся в простом гармоническом движении, путем определения жесткости пружины системы пружина-масса и простого маятника.Оборудование
- Ассорти масс
- Весна
- Метрическая палка
- Стоять
- Секундомер
- Нить
- Маятник боб
- Транспортир
- Остаток средств
Процедура
Используя закон Гука, вы определите жесткость пружины, измерив ее растяжение по мере того, как к пружине добавляются дополнительные массы.Вы определите период колебаний системы пружина-масса для различных масс и используете его для определения жесткости пружины. Затем вы сравните значения жесткости пружины, полученные двумя методами. В случае простого маятника вы измеряете период колебаний для различной длины гирлянды маятника и сравниваете эти значения с предсказанными значениями периода.Процедура A: Определение постоянной пружины с использованием закона Гука
1
Начиная с 50 г, добавляйте на вешалку массы с шагом 50 г.При добавлении каждой 50-граммовой массы измерьте соответствующее удлинение и пружины, полученное за счет веса этих добавленных масс. Введите эти значения в таблицу данных 1.2
Используйте Excel, чтобы построить график м против м . См. Приложение G.3
Используйте параметр линии тренда в Excel, чтобы определить наклон графика. Запишите это значение на листе. См. Приложение H.4
Используйте значение наклона, чтобы определить жесткость пружины k . Запишите это значение на листе.
Контрольно-пропускной пункт 1:
Попросите своего технического специалиста проверить вашу таблицу и график Excel.
Процедура B: Определение жесткости пружины из
T 2
по сравнению с м График Мы предположили, что пружина безмассовая, но у нее есть некоторая масса, которая влияет на период колебаний.Теория предсказывает, а опыт подтверждает, что если бы одна треть массы пружины была добавлена к массе м в уравнении. (11) T = 2 π5
Используйте весы, чтобы измерить массу пружины и записать ее в рабочий лист. Добавьте одну треть этой массы к колеблющейся массе перед вычислением периода колебаний.Если масса пружины намного меньше, чем колеблющаяся масса, вам не нужно добавлять одну треть массы пружины.6
Добавьте в вешалку 200 г.7
Потяните гирю на небольшое расстояние и отпустите, чтобы произвести устойчивое движение вверх и вниз без боковых колебаний или скручиваний. Когда масса движется вниз мимо точки равновесия, запустите часы и отсчитайте «ноль». Затем считайте каждый раз, когда масса движется вниз мимо точки равновесия, и на 50-м проходе остановите часы.8
Повторите шаг 7 еще два раза и запишите значения для трех испытаний в Таблицу данных 2 и определите среднее время для 50 колебаний.9
Определите период по этому среднему значению и запишите его в рабочий лист.10
Повторите шаги с 7 по 9 для трех других существенно отличающихся масс.11
Используйте Excel, чтобы построить график зависимостиT 2
отм
.12
Используйте параметр линии тренда в Excel, чтобы определить наклон и записать это значение на листе.13
Определите жесткость пружины k по наклону и запишите это значение в рабочий лист.14
Вычислите процентную разницу между этим значением k и значением, полученным в процедуре A, используя закон Гука.См. Приложение Б.
Контрольно-пропускной пункт 2:
Попросите своего технического специалиста проверить значения и расчеты в вашей таблице.
Процедура C: Простой маятник
15
Отрегулируйте маятник на максимально возможную длину и надежно закрепите шнур. С помощью 2-метровой палки тщательно измерьте длину веревки, включая длину маятника.Используйте штангенциркуль, чтобы измерить длину маятника. См. Приложение D. Вычтите половину этого значения из ранее измеренной длины, чтобы получить значение L , и запишите его в таблице данных 3 на рабочем листе.16
Используя принятое значение 9,81м / с 2
для g , спрогнозируйте и запишите период маятника для этого значения L .17
Отведите маятник в сторону и отпустите.Используйте как можно меньший угол, менее 10 °. Убедитесь, что боб качается вперед и назад, а не по кругу. С помощью секундомера измерьте время, необходимое для 50 колебаний маятника, и запишите его в Таблицу данных 3.18
Повторите шаг 17 еще два раза и запишите значения для трех испытаний в Таблицу данных 3 и определите среднее время для 50 колебаний.19
Определите период по этому среднему значению и запишите его в рабочий лист.20
Вычислите процентную ошибку между этим значением и прогнозируемым значением периода.21
Повторите шаги с 16 по 20 для трех других существенно различающихся длин.
КПП 3:
Попросите своего технического специалиста проверить значения и расчеты в вашей таблице.
Авторские права © 2010 Advanced Instructional Systems, Inc.и Государственный университет Северной Каролины. | Кредиты
Основы испытаний и анализа структурной вибрации — Crystal Instruments
Скачать PDF | © Авторское право Crystal Instruments, 2016 г., Все права защищены.Содержание: 1. Раздел первый | 2. Раздел второй | 3. Раздел третий | 4. Четвертый раздел
Введение
Тестирование и анализ структурной вибрации способствует прогрессу во многих отраслях, включая аэрокосмическую, автомобильную, промышленную, деревообрабатывающую и бумажную, энергетику, оборону, бытовую электронику, телекоммуникации и транспорт.Наиболее распространенное применение — идентификация и подавление нежелательной вибрации для улучшения качества продукции.
Это руководство по применению представляет собой введение в основные концепции вибрации конструкции. В нем представлены основы и определения с точки зрения основных понятий. В нем также обсуждаются практические применения и приводятся примеры из реальной жизни.
В этом документе рассматриваются следующие темы:
- Основная терминология
- Модели с одной и несколькими степенями свободы
- Модели непрерывной конструкции
- Измерительная техника и приборы
- Методы подавления вибрации
- Модальный анализ
- Анализ формы рабочего прогиба
Базовая терминология структурной вибрации
Термин «вибрация» описывает повторяющееся движение, которое можно измерить и наблюдать в конструкции.Нежелательная вибрация может вызвать усталость или ухудшить характеристики конструкции. Поэтому желательно устранить или уменьшить влияние вибрации. В других случаях вибрация неизбежна или даже желательна. В этом случае цель может состоять в том, чтобы понять влияние на конструкцию, или контролировать или изменять вибрацию, или изолировать ее от конструкции и минимизировать реакцию конструкции.
Анализ вибрации разделен на подкатегории, такие как свободная и вынужденная вибрация, синусоидальная вибрация и вибрация.случайная вибрация и линейная вибрация по сравнению с вращательной.
Свободная вибрация — это естественная реакция конструкции на некоторый удар или смещение. Отклик полностью определяется свойствами конструкции, и ее вибрацию можно понять, изучив механические свойства конструкции. Например, когда вы дергаете струну на гитаре, она вибрирует с настроенной частотой и издает желаемый звук. Частота тона зависит от натяжения струны и не связана с техникой защипывания.
Принудительная вибрация — это реакция конструкции на непрерывную функцию воздействия, которая заставляет конструкцию вибрировать с частотой возбуждения. Например, зеркало заднего вида на автомобиле всегда будет вибрировать с частотой, связанной с оборотами двигателя. При принудительной вибрации существует детерминированная взаимосвязь между амплитудой соответствующего уровня вибрации и функцией принуждения. Отношения продиктованы особенностями конструкции.
Синусоидальная вибрация — это особый тип вибрации. Структура возбуждается форсирующей функцией, которая представляет собой чистый тон с одной частотой. Синусоидальная вибрация не очень распространена в природе, но она представляет собой отличный инженерный инструмент, который позволяет нам понимать сложные колебания, разбивая их на простые однотонные колебания. Движение любой точки конструкции можно описать как синусоидальную функцию времени, как показано на рисунке 1 (вверху).
Случайная вибрация очень распространена в природе.Вибрация, которую водитель ощущает при вождении автомобиля, является результатом сложной комбинации источников, включая неровную поверхность дороги, вибрацию двигателя, ветер, бьющий снаружи автомобиля и т. Д. Вместо того, чтобы пытаться количественно оценить каждый из этих эффектов, они обычно описываются с помощью статистических параметры. Случайная вибрация определяет средний уровень вибрации во времени по частотному спектру. На рисунке 1 (внизу) показан график зависимости типичной случайной вибрации от времени.
(PDF) Бесплатный анализ вибрации автокрана ДСТ-0285 с учетом изменения конфигурации нагрузки системы
Кроме грузовой нагрузки, в систему были загружены массовые элементы, моделирующие
большинство элементов, конструктивных элементов и оборудования автокрана. кран.Согласно документации
учитывались значения масс кранового оборудования: кабины машиниста и машиниста,
основных и вспомогательных лебедок, противовеса, двигателя с коробкой передач, передней и задней подвески
, колес, приводов подъема и выдвижения в моделировании. Массовые
элементов, моделирующих крановые агрегаты, были размещены в местах их фактического расположения в конструкции крана
.
Подвеска нагрузки на пружинную канатную систему была принята во внимание, и значение эквивалентной упругости
канатной системы было принято для расчетов [14] в проведенном моделировании
.
Расчеты проводились исходя из 6 прядей каната на шкивном блоке и
, принимая длину каната от головки стрелы до главной лебедки равной длине стрелы
. Параметры каната были приняты как конструкция WS6x36.
Рассматривалось эквивалентное значение упругости привода опоры стрелы. Эластичность
, принятая в расчетах, варьировалась по длине привода и составляла
, что связано со значением угла подъема телескопической стрелы.
Значение жесткости опоры стрелы варьировалось в пределах 4-5×106 [Н / м]. В модели
учтено постоянное значение упругости опоры шасси (опорных приводов) [7].
3 Примерные результаты моделирования
При исследовании динамики всего крана необходимо учитывать не только поведение телескопической стрелы
, но и других крановых единиц. Динамическое поведение
связанных крановых единиц является существенным.
Рассмотрение крана как сложной системы должно также включать перемещение
телескопической стрелы, установленной на раме кузова, которая затем устанавливается на шасси
рамы.
Динамическое движение стрелы вызывает движение всей рамы кузова и
подъемного элемента рамы шасси.
Принудительные перемещения обоих кадров тесно связаны с перемещением стрелы,
, соединяющего движения основных блоков в движение всей системы поддержки крана.
Исследования проводились с предполагаемыми конфигурациями взаимных положений
крановых блоков и длиной такелажа, чтобы получить влияние изменений стрелы
аутрича и нагрузок на позиции свободных колебаний системы поддержки крана.
Для проведения исследования были приняты модели рамы кузова с телескопической стрелой
, закрепленной на раме кузова по плоскости вращения, обозначение «+ 90 °» [13]. Модели
построены с учетом изменения вылета крана и положения груза.
Изменение радиуса крана влечет за собой изменение угла наклона и длины стрелы
, а изменение нагрузки крана влечет за собой изменение ее величины и длины его подвески
. Учитывая постоянный угол расположения рамы кузова с телескопической стрелой крана
относительно рамы шасси, были приняты изменяемые параметры, связанные с изменением вылета крана
:
постоянная длина стрелы lt = 10 [м], изменяемая углы подъема стрелы
= 0 °,
25 °, 50 °, 75 °.
постоянные углы подъема стрелы
= 0 °, 25 °, 50 °, 75 °, изменяемая длина стрелы
lt = 10, 15, 20, 24 [м] (Рис. 2 ).
Изменяемое значение местоположения груза, привязанное к длине крановой канаты, было присвоено
для всех комбинаций названных параметров. Длина троса, l = 2, 10, 17, 27 [м],
определяется как расстояние груза от оголовка стрелы при минимально допустимом значении
l = 0.5 [м], было принято.
Нагрузка m была включена от mmin = 100 [кг] до mmax = 30000 [кг]. Были приняты значения масс
: m = 100, 1000, 5000, 10000, 20000, 30000 [кг]. Проверочные
Проведеновычислений для l = 0, 5, 12, 22 [м] и m = 0 [кг].
Изменения вылета крана и нагрузки, принятые при моделировании, превысили значения
, определяемые реальной грузоподъемностью, которые были включены в документацию (DTR) и таблицу грузоподъемности
.Однако они были необходимы для определения изменения частоты рассматриваемых колебаний
.
Рис. 2. Изменение длины стрелы и ее положения относительно рамы кузова в плоскости подъема
Изменения частоты колебаний выбранных форм свободных колебаний
представлены как результат решения задачи исследование вибраций крановой системы
. Анализировались изменения значений частоты колебаний для трех выбранных форм колебаний
.Выбор анализируемых форм колебаний привело
из предположения, что эти формы имеют наибольшее влияние на динамическом поведении
системы поддержки крана.
Для выбранных форм колебаний приняты следующие обозначения:
форма изгибных колебаний стрелы телескопического крана, обозначение «G», (частота
1),
форма изгибных колебаний стрела вместе с рамой, обозначение «GR»,
(частота
2),
форма изгибных колебаний стрелы вместе с рамой, обозначение «GP»,
(частота
)
3).
Форма колебаний «G» содержит в основном изгибные колебания тройной телескопической стрелы крана
в плоскости подъема (рис. 3).
Следующая форма, «ГР», содержит изгибные колебания стрелы в основном взаимодействии
с рамой кузова и на более низкой скорости с рамой шасси в качестве системы поддержки крана.
Для такой формы перемещения стрелы с рамой кузова производился поворот центральной
части рамы шасси вокруг продольной оси (рис.4).
Форма, обозначенная как «GP», также содержит изгибные колебания стрелы. В этом случае перемещение стрелы
связано со значительно большими перемещениями всей опоры
части рамы шасси. Движение отрядов происходит в вертикальных плоскостях. Для
формы «GP» амплитуда смещения элементов стрелы сопоставима с
смещениями элементов рамы шасси (рис. 5).
Для определения частоты колебаний анализируемых форм их идентификация составила
, выполненная на основе анализа перемещений крановых агрегатов при анимации
их перемещений.
5
Сеть конференций MATEC 157, 03005 (2018) https://doi.org/10.1051/matecconf/201815703005
MMS 2017
MEC3403
(Эта страница создана Крисом Снуком)
Преамбула
Вибрационная система, требующая двух или более независимые координаты (и их производные) к описать его поведение называется множественной степенью свободы система.Фактическое количество степеней свободы для колебательная система зависит от количества инерционных элементы (массы или твердые тела) и количество ограничения, накладываемые на движение.В результате движение будет смесь мод , каждая из которых имеет свою частота. Если возбуждается только одна мода, только одна частота будет задействована. Тогда массы будут двигаться по схеме, где смещения могут не равны, но все они будут постоянно пропорциональны друг другу.
Нажмите здесь чтобы увидеть один режим двухмассовой системы (а затем нажмите на «запустить модель»).
Нажмите здесь чтобы увидеть другой режим той же системы.
Нажмите здесь чтобы увидеть, как сочетаются два режима, когда оба в восторге.
Нажмите здесь чтобы увидеть, что произойдет, если средняя пружина ослабнет, так что модальные частоты близки друг к другу.
1 Уравнения движения
Начнем с системы, состоящей из двух масс соединены вместе и с окружающей средой линейными пружины и вязкие демпферы. Самый очевидный независимыми координатами являются положение массы 1 и положение массы 2, так что они становятся нашими двумя степени свободы.1.1 Прямое применение 2-го закона Ньютона
Наша первая задача — разработать уравнения движения для наша пружинно-массовая система.Рассмотрим массу 1 и обозначим ее смещение от положение равновесия на x 1 (справа). В изменение длины пружины k 2 зависит от положения как массы 2, так и массы 1, и аналогично скорость изменения длины дашпота зависит от их разницы. Схема свободного тела масса 1:
Мы применяем второй закон движения Ньютона к массе 1, когда внешняя сила f 1 (t) приложена к Это.Приравнивая массу, умноженную на ускорение, к сумме сил приводит к:
Отметим, что ускорение массы 1 также зависит от положения и скорости другой массы в система. Таким образом, движения обеих масс связаны между собой. вместе, как и следовало ожидать.
Преобразование этого в знакомую форму приводит к определяющее уравнение движения для массы 1:
Аналогичный анализ сил, действующих на массу 2, может быть
выполнено:
и это приводит к основному уравнению движения для mass 2:
Эти два линейных дифференциальных уравнения взаимосвязаны и могут быть выражены в матричной форме как:
Для нашей системы с двумя степенями свободы мы отмечаем, что есть два совместные уравнения движения второго порядка и каждая матрица имеет две строки и два столбца, и каждая вектор смещения, скорости и ускорения имеет два ряды.
| | Упражнение 1.1Разверните каждый из терминов в приведенной выше матрице. представление для основных уравнений движение, чтобы убедиться, что оно эквивалентно два отдельных уравнения, полученных с помощью Второй закон. |
Когда демпфирования нет, его можно разделить на два колебательные «режимы».Но когда добавляется демпфирование, чтобы решить или смоделировать уравнения, мы должны разбить уравнения в форму первого порядка и выразить скорости изменения через переменные состояния x 1 , v 1 , x 2 и v 2 .
Это будет рассмотрено в разделе 4.
2 Матричная форма уравнений движение
В более эрудированных работах и учебниках используется координаты ‘q, поэтому вы должны быть готовы к встрече их.Они могут учитывать гироскопические силы в дополнение к «обычным» силам пружины жесткость и демпфирование. Матричная форма система управляющих уравнений движения выглядит следующим образом а матрицы компонентов обычно называют перечисленные ниже:
Матричная форма уравнений движения должна быть знакомо вам, поскольку вы также видели это в курс MEC3302 «Вычислительная механика в дизайне», когда проведение модального анализа конструкций.Посмотрим подробнее об этом в следующем разделе.
3 Бесплатная характеристика Отклик
На данном этапе нас больше всего интересуют естественные частотная характеристика системы, и для нескольких системы степеней свободы, мы также хотим знать, какие формы колебаний возникают. Итак, начнем с рассмотрения бесплатного ответа незатухающих система.
Для простой системы вибрирующих масс мы устанавливаем Матрицы демпфирования, гироскопии и кровообращения до нуля, а для свободной вибрации вектор силы также равен нулю.Таким образом, наши уравнения движения сводятся к:
Эти матрицы описывают набор «n» линейных секунд обыкновенные дифференциальные уравнения порядка, где «n» — количество степеней свободы в системе. Мы ожидайте, что общий вид решения будет аналогичным к тому, что мы видели ранее, где решения задействованы синусоидальные волны.
Алгебра и тригонометрия станут намного проще, если мы представляют ответы как общие экспоненты, а для незатухающие синусоидальные колебания эти экспоненты просто задействуйте угловую частоту, умноженную на j, квадратный корень из -1.
Таким образом, решение для каждой массы будет иметь вид:
, представляющий смесь всех различных частоты.
Но для каждой отдельной частоты мы можем возьмите только один из этих взносов.
Если для этой частоты мы построим все наши перемещения
в вектор {x}, то его вторая производная будет
Таким образом, мы можем заменить это на
чтобы получить
или точнее
где [I] — единичная матрица.
Инвертировать матрицу [M] не проблема. M представляет собой матрицу с диагональными членами, равными масс m i и его обратная сторона также диагональна с условиями, которые составляют 1 / м и для каждой массы.
Теперь у нас есть совершенно «здоровый» вектор {x}, умноженный на матрицу, чтобы получить вектор нули. Матрица должна быть «сингулярной», что означает что его определитель равен нулю.
Когда мы возьмем определитель, мы получим многочлен порядка n в омега-квадрате, который будет иметь n решения.
Для каждой из этих частот мы можем найти соответствующий собственный вектор {x}, который будет представлять режим работы системы.
Исправить примечания [здесь] перед тем как продолжить.
Проблема собственных значений
В этом случае матрица M представляет собой просто диагональный набор числа, представляющие каждую из масс.Если мы умножьте это на, а затем вычтите из K, мы будем матрица K с вычитанием m из каждой диагональный член. Его определитель будет равен нулю.
При расширении определителя вы получите характеристику . полином , здесь через — вместо более обычного λ.
Корни
полиномиальное выражение определителя: собственные значения матрицы
M -1 Ки в нашем 2-dof будет два таких решения. система, поэтому будет две собственные частоты.
Условие состоит в том, чтобы затем отсортировать собственные значения в
по возрастанию, так что вы говорите о первом
собственная частота (самая низкая) и вторая и т. д.
собственных вектора , связанных с этими решаемые собственные значения находятся заменой каждого собственное значение, в свою очередь, в матричное уравнение:
где {x} i — собственный вектор, связанный с собственным значением λ i , которое равно — i .
Поскольку этот набор одновременных уравнения « выродились » (поскольку определитель равен нулю) мы не можем определить размер собственный вектор, просто его направление.
Но это не имеет значения, так как это направление Это приравнивается. Чтобы привести в порядок набор, мы можем масштабировать их так, чтобы все они имели единичную величину, иначе масштабируйте так, чтобы верхний элемент был равен 1 (не всегда возможно, так как в одном из собственных векторов он мог бы равняться нулю)
Тогда общим решением будет смесь этих собственные векторы, каждый из которых умножен на некоторую константу и по экспоненте от jt, умноженной на соответствующее угловая частота.(Поскольку это сложно, будьте подготовлены для того, чтобы постоянные умножения также были сложный. Затем берем реальную часть.)
| | ИтогоСначала исследуем силы получить выражения для ускорений наши массы. Если демпфирования нет, получим уравнения со вторыми производными от смещения и без первых производных.Если мы поместим их в матричную форму, они будут просто покажите, что матрица M умножена на вектор ускорений равно матрице K раз смещения. Одна из характеристик собственного значения решение (A x = λ x ) состоит в том, что начальный вектор и ускорение в том же направлении, но просто разной величины (λ). Для самого реального задачи, [K] и [M] вещественны и симметричны. и, таким образом, решения собственного значения проблемы тоже реальны. Но если какое-либо собственное значение положительный, позиция улетит экспоненциально. Все собственные значения должен быть отрицательным для решения, которое колеблется.где j «воображаемое» число, которое так часто встречается в математика. |
| Упражнение 3.1Определите собственные частоты, формы колебаний и модальная матрица для системы представлен ниже, где все три пружины имеют одинаковой жесткости, k, и обе массы являются то же, м. |
Ключевые шаги в решении этой проблемы:
Запись уравнения движения в матричной форме:
где
Матрица инерции, которая не связана, и Матрица жесткости, который связан
(поскольку K не диагональный, это означает, что один
переменная влияет на другую).
Решите характеристическое уравнение для этого проблема:
Подстановка матрицы инерции и жесткости приводит к Кому:
Решение для определителя приводит к:
Таким образом:
Есть два возможных решения, поэтому
Найдите собственные векторы, соответствующие этим собственные значения:
Для каждого собственного значения решите собственный вектор уравнение.Для первого (наименьшего) собственного значения это становится:Это сокращается до:
Раскладывая первую из этих двух строк, мы обнаруживаем, что X 21 = X 11 или:
И форма моды, связанная с первым естественным частота:
Аналогичный процесс проводится для второго собственного значения и для этого форма моды, связанная со вторым собственная частота:
Модальная матрица:
Теперь нам нужно вернуться к физической системе, чтобы подумайте, что на самом деле означают эти формы колебаний.
В верхней части этого модуля вы увидели преамбулу со ссылками на моделирование именно такой системы, с масса = 1 и жесткость = 25.
Подставьте эти значения в уравнения для омеги.
выше и посмотрите, делает ли модель то, что вы ожидаете
каждый из первых двух связанных примеров
1 и 2.
| | Упражнение 3.2Нажмите здесь, чтобы увидеть другая симуляция, где есть две массы 1 кг и пружины имеют жесткость 25 Н / м. У этого есть только один демпфер — небольшой демпфирование необходимо, чтобы «старые» вибрации умерли прочь, когда вы вносите изменения. Конец третьей пружины также может быть «возбужден» на частоте, которую вы выбираете нажимая кнопки «увеличить» или «уменьшить». Путем изменения частоты возбуждения и ищите резонанс, проверьте свой расчетные значения для резонансных частоты. Были ли они правы? Опишите режимы вибрации при этих
частоты. |
4 Уравнения состояния
Когда есть демпфирование, мы больше не можем полагаться на уравнения «простого гармонического движения», которые не включают скорость.Для нашей двухмассовой системы у нас есть четыре переменные, а не два, являющиеся двумя смещениями и две скорости.Мы можем определить v 1 как dx 1 / dt и v 2 = dx 2 / dt, что дает нам два из четырех состояний уравнения сразу:
так что матричное уравнение теперь является уравнением первого порядка,
где от a до h — константы, которые вы получаете из пружины и амортизаторы.
Вы можете видеть, что характеристическое уравнение теперь имеет вид четвертый порядок. Его можно разделить на два квадратичные, каждая из которых представляет свою незатухающую естественную частота и коэффициент затухания.
Так что же важного в этих квадратиках? Каждый будет представляют собой систему второго порядка вида
(не такие же a и b, как указано выше)
который часто записывается более сложным образом как
где символы имеют особое значение как «коэффициент демпфирования» и «незатухающая собственная частота».
Если затухание невелико, решение будет представлять собой синусоидальная волна, «модулированная» убывающей экспонентой. Именно эта экспонента вас заинтересует, поскольку он определяет, как быстро исчезнет любое нарушение.
Когда вы решите квадратичное уравнение для корней, вы получите
найти, что действительная часть пары комплексных корней
это просто
так что средний член дает вам коэффициент экспоненциальный спад.Вы захотите, чтобы он был большим и отрицательный для быстрого распада.
При увеличении демпфирования резонансная частота уменьшится. При критическом затухании вы только иметь затухание без синусоиды, но с умножением т брошен в к одному из условий.
Помимо этого, один реальный корень будет уменьшаться, в то время как другие увеличения.
Так что насчет ДВУХ квадратичных? Как ты выбираешь лучшее демпфирование, когда оба поменяются? Ну это очевидно, более медленный из двух режимов, который беспокоить тебя.Вы не против, если другой становится медленнее, пока остается тем быстрее.
| | Рабочие примеры предыдущих заданийНажмите здесь, чтобы увидеть вопрос о первом задании. Поработайте над этим, прежде чем искать решение. Если ссылки на решение нет, ответы будут передаваться на форуме в течение семестра. |
Второй вопрос о заданииНапомним систему упражнения . 3,2 .Это было изменено путем удвоения второго масса до 2 кг. Пружины сейчас жесткость 10 Н / м. Анализируемая система: , здесь 1. Рассчитайте новую характеристику уравнение, если нет демпфирования, используя 2 x 2 матрица. 2. Вместо этого выразите уравнения в форма первого порядка как матрица 4 x 4, где значение демпфера составляет c Нс / м. 3. Что это за новая характеристика
полином? 4.Методом проб и ошибок на модели, при каком значении c колебания умрут прочь быстрее всего? (Чтобы изучить его по алгебре, вы можете использовать Matlab
найти четыре корня многочлена, но
ни для чего другого) |
| Два предыдущих экзаменационных вопроса 2012 годаВОПРОС 1 (175 баллов)Упрощенная подвеска для железнодорожного вагона колесо показано на рисунке 1.Масса колесосам по себе можно игнорировать. Инерционная нагрузка поддерживается этим колесом, можно предположить, что представляют собой точечную массу 300 кг. Пружина, поддерживающая вес, имеет жесткость 10000 Н / м. Поезд движется со скоростью, испытывая вариации высоты поверхности пути u (t). (а) Без демпфера и его пружины, вывести дифференциальное уравнение второго порядка к описать вертикальное отклонение x перевозка. (20 баллов) б) какова будет частота незатухающие колебания? (Циклов в секунду) (25 баллов) Амортизатор добавлен, как показано на рисунке. форма пружины жесткостью 80 000 Н / м в серия с демпфером коэффициента c Нс / м. (c) Две из переменных состояния — это вертикальное отклонение x и скорость его изменения ẋ. Покажите, что к описать движение. Что это такое? (10 баллов) (d) Вывести три первого порядка дифференциальные уравнения для описания движения. (20 баллов) (e) Представьте эти уравнения в матрице форма, включая c как параметр и u (t) как вход. (20 баллов) (f) Выведите характеристическое уравнение чтобы найти собственные значения. (Подсказка: не спешите конвертировать дроби в десятичные) (40 баллов) (g) Что важного в реакция, если c = 8,000 / 3 Нс / м? Объяснять. (40 баллов) Рисунок 1.Подвеска с демпфером |
Leave A Comment