
Поглощающие аппараты | PROлокомотив
Автор: admin Рубрика: Оборудование локомотивов Комментариев нетПоглощающие аппараты применяются для обеспечения частичного смягчения удара, снижения разрывных усилий, возникающих в торцевой балке, в месте сочленения автосцепного устройства и хребтовой рамы кузова. Эффективность их работы осуществлена посредством образования в механизме аппарата противодействующих сил сопротивления, а также изменения и распределения энергии соударения в другие виды кинетических сил.
В данное время, в конструкции механизмов поглощающих аппаратов устанавливаемых на новые вагоны, имеются значительные изменения, от раннее выпускаемых. Причиной тому послужило введение OCT 32.175 в начале 2000 годов, что способствовало разработке новых видов поглощающих аппаратов с использованием современных устройств и инновационных материалов. Порядка двенадцати крупносерийно изготавливаемых моделей поглощающих аппаратов спроектировано за последнее десятилетие.
По техническим характеристикам и методам гашения кинетической энергии, поглощающие аппараты разделены на следующие виды:
Фрикционные (ударопогашение преобразуется трением возникающим при работе фрикционных элементов конструкции)
Гидравлические (распределение сил при перетекании жидкости в рабочих камерах)
Эластомерные (сопротивление путем сдавливания эластомерного материала)
Аппараты из упругих элементов (преобразование поступившей силы при трении и деформации упругих частей)
Комбинированные (предполагает использование в конструкции аппарата более одного вышеуказанного способа)
Все производимые модели должны соответствовать стандартизирующему требованию по габаритным размерам, предусматривающее обеспечение возможности установки на железнодорожный подвижной состав, согласно ГОСТ 3475-81.
Все аппараты разделены на четыре типа в зависимости от энергоемкости
- T0 – пружинно-фрикционные аппараты.
- T1 – фрикционные аппараты с комбинированными.
 упругими элементами.
упругими элементами. - T2 – эластомерные аппараты, иногда комбинированные.
- T3 – эластомерные поглощающие аппараты.
 упругими элементами.
упругими элементами.Аппараты типа T0 , к данному классу относятся следующие аппараты:
Ш-1-TM (Ш–шестигранный, 1–вариант конструкции, T–термоупроченный, M–модернизированный) устанавливается на четырехосные грузовые вагоны с длинной ударной розеткой 185мм и постройки до 1985 года. Конструктивный рабочий ход 70 мм, энергоемкость 25 кДж.
Ш-2-T второй вариант конструкции, устанавливается на восьмиосных грузовых вагонах. Конструктивный рабочий ход 110 мм, энергоемкость 65 кДж.
Ш-2-B (B–взаимозаменяемый) устанавливается на основные типы подвижного состава с длинной ударной розетки 130мм. Конструктивный рабочий ход 90 мм, энергоемкость 46 кДж.
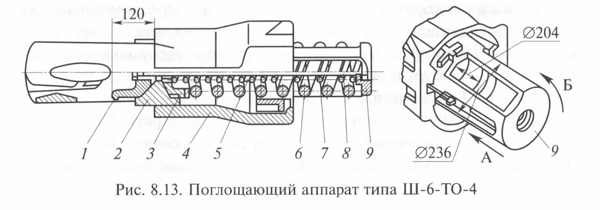
Ш-6-TO-4 (6–вариант конструкции, T–термоупроченный, O–объединенный, для четырехосных вагонов) поставлялся на четырехосные вагоны с длинной выступающей части ударной розетки 130мм.
ПМК-110A (П–прямоугольный, MK–металлокерамический, 110A–рабочий ход) устанавливается на рефрижераторных, восьмиосных вагонах, фитинговых платформах для перевозки контейнеров.
ЦНИИ–H6 (ЦНИИ–центральный научно-исследовательский институт, H–Новикова) применяется на электропоездах, цельнометаллических вагонах, а также рефрижераторном подвижном составе.
Аппараты T1 используются на основных типах подвижного состава (платформы, полувагоны, крытые и т.д.), либо на вагонах эксплуатируемых в поездах, не подлежащих расформированию.
Поглощающий аппарат P–2П (P–резинометаллический, 2–вариант конструкции, П–пассажирский) устанавливается на пассажирские вагоны, электро и дизельпоезда. Поглощающий аппарат P–5П (P–резинометаллический, 5–вариант конструкции, П – пассажирский) с увеличенным ходом до 80мм, монтировался также на пассажирский подвижной состав.
Поглощающий аппарат PT–120 (P–резинометаллический, T–термо-упроченный, 120–рабочий ход) устанавливается на грузовые вагоны современного поколения._-_Eupedia.jpg)
Поглощающий аппарат ПМКП–110 (П–прямоугольный, MK–металло-керамический, П–полимерный,110–рабочий ход) используется на современных грузовых вагонах. В них применен подпорно-возвратный механизм состоящий из набора упругих полимерных блоков вместо пружин.
Поглощающий аппарат АПМ-120-Т1 (АП–поглощающий аппарат, M–модернизированный, 120 – рабочий ход, T1–класс аппарата) устанавливается на грузовые вагоны нового поколения. Спроектирован на основе изготавливаемого поглощающего аппарата ПМКП–110K–23. Состоит из упруго-фрикционного механизма, где пружинный комплекс заменен пакетом упругих элементов.
Поглащающие аппараты категории T2 используются для перевозки дорогостоящих и опасных грузов.
Поглощающий аппарат 73ZW первый на железных дорогах России из эластомерных аппаратов, который стал применяться на грузовых вагонах. Производитель АО «КАМАКС», Польша
Поглощающий аппарат АПЭ-95-УВЗ (АПЭ–аппарат поглощающий эластомерный, 95–рабочий ход, мм, УВЗ–разработан уральским вагоностроительным заводом). Энергоемкость составляет 120 кДж.
Энергоемкость составляет 120 кДж.
Поглощающий аппарат АПЭ-90-А (А–разработан ОАО «АВИААГРЕГАТ»). Рабочий ход 90 мм, энергоемкость 115 кДж.
Аппараты класса T3 применяются на специальных грузовых вагонах для транспортировки особо опасных грузов таких как сжиженные газы и ядовитые вещества. Кним относятся поглощающий аппарат:
73ZW У2 Производства OOO «ЛЛМЗ-KAMAX», от предыдущей модели визуально он отличается уменьшенной толщиной плиты на 20 мм. Энергоемкость составляет 140 кДЖ.
Поглощающий аппарат АПЭ-120-И ОАО «АВИААГРЕГАТ»). с увеличенной эноргоемкостью до 150 кДж. Конструктивный ход 120 мм.
Начиная с 2005 года, на все изготавливаемые вагоны производится установка поглощающих аппаратов не ниже класса T1. Также с 2002 года все выпускаемые цистерны оснащаются аппаратами T2 и T3. С 2007 года, при проведении капитального и капитально-восстановительного ремонтов вагонов, в цехах ремонтных предприятий, происходит замена старых поглощающих аппаратов на новые, согласно классовой спецификации.
Основные типы гасителей колебаний вагонов или его частей
Поглощающие аппараты предназначены гасить часть энергии удара, уменьшая продольные растягивающие и сжимающие усилия, передающиеся на раму кузова вагона через автосцепку. Принцип их действия основан на возникновении в аппарате сил сопротивления и преобразовании кинетической энергии соударяющихся масс в другие виды энергии. По типу рабочего элемента, создающего силы сопротивления, поглощающие аппараты бывают: пружинные, пружинно-фрикционные, с резинометаллическими элементами, гидравлические и др. Пружинные аппараты не нашли широкого применения в вагонах из-за большой отдачи пружин и невозможности получить высокую энергоемкость в ограниченных габаритах в конструкциях вагонов. Они применяются лишь в буферных устройствах.
Пружинно-фрикционные аппараты
Пружинно-фрикционные аппараты автосцепки получили наибольшее распространение в вагонах из-за простоты и возможности их проектирования с удовлетворительными параметрами. Основная часть подвижного состава российских железных дорог оснащена пружинно-фрикционными поглощающими аппаратами шестигранного типа — аппаратами Ш-1-ТМ, которыми оборудовались четырехосные грузовые вагоны постройки до 1979 г., а затем преимущественно аппаратами Ш-2-В. Восьмиосные вагоны оснащались аппаратами типа Ш-2-Т и Ш-4-Т, имеющими отличие в габаритных размерах (Ш — шестигранный, Т — термически обработанный, М — модернизированный, В — взаимозаменяемый). Эти аппараты сходны между собой по конструкции и различаются в основном параметрами: энергоемкостью, ходом, первоначальной и конечной силой сжатия.
Основная часть подвижного состава российских железных дорог оснащена пружинно-фрикционными поглощающими аппаратами шестигранного типа — аппаратами Ш-1-ТМ, которыми оборудовались четырехосные грузовые вагоны постройки до 1979 г., а затем преимущественно аппаратами Ш-2-В. Восьмиосные вагоны оснащались аппаратами типа Ш-2-Т и Ш-4-Т, имеющими отличие в габаритных размерах (Ш — шестигранный, Т — термически обработанный, М — модернизированный, В — взаимозаменяемый). Эти аппараты сходны между собой по конструкции и различаются в основном параметрами: энергоемкостью, ходом, первоначальной и конечной силой сжатия.
Пружинно-фрикционные аппараты шестигранного типа состоят из корпуса с шестигранной горловиной, в которой размещены нажимной конус и три клина. Внутри корпуса поставлена двухрядная пружина: наружная и внутренняя, сверху которой уложена нажимная шайба. С целью увеличения высоты пружины у аппаратов Ш-2-В, Ш-2-Т и Ш-4-Т отсутствует нажимная шайба.
Пружинно-фрикционный аппарат типа Ш-6-ТО-4 разработан для грузового четырехосного подвижного состава. Он состоит из корпуса, выполненного за одно целое с тяговым хомутом, отъемного днища 9, нажимного конуса, трех фрикционных клиньев, опорной шайбы, наружной пружины, двух внутренних пружин, между которыми установлена промежуточная шайба, и стяжного болта с гайкой. Аппарат Ш-6-ТО-4 имеет шестигранную схему фрикционного узла и принцип действия по типу рассмотренных выше конструкций. Он взаимозаменяем с аппаратами Ш-1ТМ и Ш-2-В по установочным размерам. Однако при установке данного аппарата в вагоны прежней постройки требуется модернизация упоров, обеспечивающих свободное размещение между ними съемного днища.
Он состоит из корпуса, выполненного за одно целое с тяговым хомутом, отъемного днища 9, нажимного конуса, трех фрикционных клиньев, опорной шайбы, наружной пружины, двух внутренних пружин, между которыми установлена промежуточная шайба, и стяжного болта с гайкой. Аппарат Ш-6-ТО-4 имеет шестигранную схему фрикционного узла и принцип действия по типу рассмотренных выше конструкций. Он взаимозаменяем с аппаратами Ш-1ТМ и Ш-2-В по установочным размерам. Однако при установке данного аппарата в вагоны прежней постройки требуется модернизация упоров, обеспечивающих свободное размещение между ними съемного днища.
Поглощающий аппарат Ш-6-ТО-4У является вариантом предыдущего типа. Его особенностью является то, что в конструкции отсутствует стяжной болт с гайкой. Поглощающий аппарат Ш-6-ТО-4У состоит из корпуса 1, изготовленного совместно с хомутовой частью, имеющей упоры 2, упорной плиты 3, конуса 4, фрикционных клиньев 5, размещенных в горловине б корпуса аппарата, и пружин 11 и 12, предварительно сжатых съемным днищем 10. В сжатом состоянии через вырез 7 закладываются сухари 9, которые после снятия монтажной нагрузки посредством заплечиков 8 и буртиков 13 (рис. 3.56, 6) корпуса фиксируют днище, удерживающее все детали в собранном состоянии аппарата.
В сжатом состоянии через вырез 7 закладываются сухари 9, которые после снятия монтажной нагрузки посредством заплечиков 8 и буртиков 13 (рис. 3.56, 6) корпуса фиксируют днище, удерживающее все детали в собранном состоянии аппарата.
Пружинно-фрикционный поглощающий аппарат ПМК-110А с металлокерамическими элементами применяется в рефрижераторном подвижном составе, платформах для перевозки контейнеров и частично восьмиосных вагонах.
В аппарате ПМК-110А в целях повышения энергоемкости и стабильности характеристик в качестве фрикционных элементов применены металлокерамические пластины. Он состоит из корпуса, наружной и внутренней пружины, опорной пластины, фрикционных клиньев, нажимного конуса. Между боковыми стенками корпуса и неподвижными пластинами размещаются подвижные пластины. Детали аппарата фиксируются стяжным болтом с гайкой.
Поглощающий аппарат типа ПФ-4 состоит из корпуса коробчатого сечения, выполненный в виде единой отливки с тяговым хомутом.
В корпусе размещен сменный фрикционный узел, взаимодействующий через центральную опорную плиту с подпорным комплектом. Фрикционный узел состоит из распорного клина, опирающегося своими наклонными поверхностями на подвижные клинья подвижных плит, установленных подвижно в продольном направлении на поперечных ребрах корпуса, неподвижных клиновых вкладышей и боковых вкладышей, отбойной пружины и центральной опорной плиты. Подпорный комплект аппарата включает в себя силовые наружную, внутренние пружины с промежуточной шайбой, размещаемые в удлинителе, который монтируется в корпусе через отверстие в днище. Работа аппарата характеризуется высокой скоростью приработки и для условий эксплуатации оценивается периодом 0,5—1 год.
Фрикционный узел состоит из распорного клина, опирающегося своими наклонными поверхностями на подвижные клинья подвижных плит, установленных подвижно в продольном направлении на поперечных ребрах корпуса, неподвижных клиновых вкладышей и боковых вкладышей, отбойной пружины и центральной опорной плиты. Подпорный комплект аппарата включает в себя силовые наружную, внутренние пружины с промежуточной шайбой, размещаемые в удлинителе, который монтируется в корпусе через отверстие в днище. Работа аппарата характеризуется высокой скоростью приработки и для условий эксплуатации оценивается периодом 0,5—1 год.
Гидравлические поглощающие аппараты
Действие гидравлических поглощающих аппаратов основано на протекании жидкости через калиброванные (дроссельные) отверстия из одной полости в другую, что создает упругое сопротивление при ударах в автосцепку. Для обеспечения восстановления аппарата в исходное состояние и быстрой подготовки его к восприятию последующих ударных нагрузок в качестве упругого элемента применяют инертный газ. Гидрогазовые поглощающие аппараты разработаны в двух вариантах: ГА-ЮМ и ГА-500.
Гидрогазовые поглощающие аппараты разработаны в двух вариантах: ГА-ЮМ и ГА-500.
Гидравлический поглощающий аппарат ГА-100М состоит из корпуса , имеющего цилиндрическую внутреннюю поверхность; нажимного поршня (стакана), внутри которого размещен плавающий поршень; промежуточного дна, закрепленного в корпусе стопорными кольцами; второго плавающего поршня; штока, который проходит через центральное отверстие промежуточного дна и упирается одним концом в поршень. Другой конец штока меньшего диаметра свободно проходит в центральное отверстие днища поршня, в котором находятся дроссельные отверстия и перепускные пазы.
В аппарате имеются три основные полости А, В и С. Полость А низкого давления заполняется нейтральным газом — азотом при начальном давлении 0,4 МПа. Полость В заливается рабочей жидкостью АМГ. Полость С высокого давления заполняется нейтральным газом при начальном давлении 9 МПа.
Под действием внешней нагрузки Т поршень перемещается внутрь корпуса вдоль неподвижного штока. При этом рабочая жидкость через дроссельные отверстия и пазы перетекает из полости В в пространство B1, воздействуя на плавающий поршень, перемещая его и сжимая газ в полости А. При дальнейшем движении днище поршня упирается в выступ штока, перекрывает пазы, увеличивая гидравлическое сопротивление аппарата. Затем под действием поршня шток начинает перемещаться, давит на плавающий поршень, преодолевая давление сжатого газа в полости С и сдвигая его вправо.
При этом рабочая жидкость через дроссельные отверстия и пазы перетекает из полости В в пространство B1, воздействуя на плавающий поршень, перемещая его и сжимая газ в полости А. При дальнейшем движении днище поршня упирается в выступ штока, перекрывает пазы, увеличивая гидравлическое сопротивление аппарата. Затем под действием поршня шток начинает перемещаться, давит на плавающий поршень, преодолевая давление сжатого газа в полости С и сдвигая его вправо.
Таким образом, в полостях А и С повышается давление газа, что способствует сравнительно быстрому возвращению частей аппарата в исходное положение при снижении силы Т.
Гидравлический поглощающий аппарат ГА -500 состоит из корпуса и входящего в него плунжера. В аппарате две газовые А и Б и три гидравлические В, Г и Д камеры. Камеры В и Д разделены промежуточным дном, в котором укреплен регулирующий стержень, имеющий продольные профилирующие канавки. Газовая камера низкого давления А отделена от гидравлической камеры Д плавающим поршнем; заглушки заправочных отверстий.
Гидравлические камеры В и Г разделены жестко закрепленной в плунжере диафрагмой, которая снабжена центральным отверстием для пропуска регулирующего стержня и дополнительными дроссельными отверстиями, перекрываемыми обратным клапаном.
Связь гидравлических камер В и Д осуществляется также через дроссельные отверстия в промежуточном дне. Зарядка газовых камер азотом производится через штуцера, снабженные прямыми клапанами. Зарядное давление газа в камере А составляет 3,5 МПа, в камере Б— 9 МПа. Рабочей жидкостью в гидравлических камерах служит масло АМГ-10.
Работа аппарата ГА-500 сводится к следующему. При воздействии на аппарат продольных сжимающих сил плунжер входит внутрь корпуса, вытесняя жидкость из камеры В через отверстия жиклеров в промежуточном дне в камеру Д и сжимая газ в камере А При дальнейшем перемещении плунжера плавающий поршень упирается в дно корпуса, жидкость из камеры В при этом через отверстия жиклеров в диафрагме и профильные канавки штока перетекает в камеру Г, перемещая плавающий поршень и сжимая газ в камере Б. Перетекание жидкости через калиброванные отверстия создает сопротивление, зависящее от скорости приложения нагрузки к аппарату.
Перетекание жидкости через калиброванные отверстия создает сопротивление, зависящее от скорости приложения нагрузки к аппарату.
После снятия с аппарата сжимающих сил давлением газа в газовых камерах А и Б на плавающие поршни и жидкость из камер Д и Г выжимается в камеру В, в результате чего происходит восстановление аппарата. Наличие в аппарате регулирующего элемента в виде стержня, имеющего профильные канавки, позволяет создавать необходимое сопротивление аппарата в зависимости от скорости соударения единиц подвижного состава, что обеспечивает улучшение условий его работы.
Гидравлический аппарат ГА-500 может быть использован как для четырехосного так и для восьмиосного подвижного состава. Аппараты данного типа в отличие от пружинно-фрикционных не требуют приработки и реализуют свою максимальную энергоемкость с момента начала эксплуатации.
Для разрабатываемых конструкций аппаратов в связи с перспективными условиями эксплуатации удлиненных поездов установлены следующие основные требования: динамическая энергоемкость при продольной силе 1,5 МН должна быть не менее 45 кДж; максимальный ход аппарата — 70—100 мм; сила начальной затяжки — в пределах 25—50 кН; коэффициент необратимого поглощения энергии — не менее 0,5.
Поглощающие аппараты пассажирских вагонов
Пружинно-фрикционный аппарат типа ЦНИИ-Н6 применяется в пассажирских вагонах. Он состоит из двух частей: пружинной и пружинно- фрикционной, стянутых болтом. Пружинно-фрикционная часть по конструкции и принципу действия аналогична рассмотренной выше. Эта часть имеет шестигранную горловину, нажимной конус, три фрикционных клина, нажимную шайбу, наружную и внутреннюю пружины.
Пружинная часть состоит из основания, центральной пружины, четырех угловых длинных и четырех коротких пружин, одетых на концы цилиндрических упорных стержней, имеющих в средней части утолщение. Короткие пружины размещаются в угловых нишах основания, а длинные, взаимозаменяемые с внутренней пружиной, в нишах горловины .
Поглощающий аппарат Р-2П (Р — резиновый, П — пассажирский) взаимозаменяем с аппаратом ЦНИИ-Нб. Этот аппарат отличается простотой конструкции и повышенной надежностью в эксплуатации, хорошей стабильностью работы, более высокой энергоемкостью при меньшей массе по сравнению с пружинно-фрикционными аппаратами.
В передней части корпуса, имеющего форму хомута, установлена нажимная плита, опирающаяся на пакет из девяти секций резинометаллических элементов, разделенных на две части промежуточной плитой. Каждая секция резинометаллического элемента состоит из двух металлических пластин, между которыми расположен слой морозостойкой резины, соединенной с пластинами методом горячей вулканизации. Слой резины по периметру имеет параболическую выемку, что обеспечивает деформацию резины без выжимания за пределы пластин при полном сжатии аппарата. Для предотвращения поперечного смещения резинометаллических элементов на днище корпуса, нажимной и промежуточной плитах, а также на стальных пластинах секций имеются выступы и соответствующие им впадины. Предварительная затяжка аппарата обеспечивается за счет того, что высота пакетов резино-металлических элементов в свободном состоянии вместе с промежуточной плитой превышает на 13,5 мм расстояние от нажимной плиты до днища корпуса.
В поглощающем аппарате Р-4П резинометаллические элементы подобны элементам, применяемым в аппарате Р-2П. Отличие лишь в толщине, которая составляет 24,2 мм вместо 41,5 у аппарата Р-2П. Силовая характеристика поглощающего аппарата Р-4П аналогична рассмотренной выше. Аппарат Р-4П рекомендован для рефрижераторных вагонов.
Отличие лишь в толщине, которая составляет 24,2 мм вместо 41,5 у аппарата Р-2П. Силовая характеристика поглощающего аппарата Р-4П аналогична рассмотренной выше. Аппарат Р-4П рекомендован для рефрижераторных вагонов.
Поглощающий аппарат Р-5П разработан для перспективных условий эксплуатации пассажирских вагонов. Отличие от аппарата Р-2П в том, что поперечные размеры резинометаллических элементов увеличены, а их толщина уменьшена до 33 мм вместо 41 мм. Установочные размеры аппарата полностью сохранены.
Частотная формула — что такое частотная формула? Примеры
Частотная формула используется для определения частоты волны. Частота определяется как количество циклов, совершаемых в единицу времени. Он также говорит о том, сколько гребней проходит через фиксированную точку в единицу времени. Иногда его называют обратным времени. Частота выражается в герцах (Гц). Частотная формула используется для определения частоты волны. Давайте лучше поймем это на решенных примерах.
Что такое формула частоты?
Частота — это общее количество повторений повторяющегося события в единицу заданного времени. Существуют различные частотные формулы для расчета частоты в зависимости от известных величин. Формула частоты волны используется для определения частоты (f), периода времени (T), скорости волны (V) и длины волны (λ). 1 Герц относится к одному циклу в секунду.
Существуют различные частотные формулы для расчета частоты в зависимости от известных величин. Формула частоты волны используется для определения частоты (f), периода времени (T), скорости волны (V) и длины волны (λ). 1 Герц относится к одному циклу в секунду.
Формула частоты
Формула частоты дается как,
Формула 1: Формула частоты по времени дается как:
f = 1/T
где
- f — частота в герцах, измеренная в м/с, а
- T — время выполнения одного цикла в секундах
Формула 2: Формула частоты для длины волны и скорости волны задается следующим образом:
Формула 3: Частота с точки зрения угловой частоты выражается как,
f = ω/2π
, где ω — угловая частота
Давайте лучше поймем формулу частоты на нескольких решенных примерах.
Хотите найти сложные математические решения за считанные секунды?
Воспользуйтесь нашим бесплатным онлайн-калькулятором, чтобы решить сложные вопросы. С Cuemath находите решения простыми и легкими шагами.
С Cuemath находите решения простыми и легкими шагами.
Запишитесь на бесплатный пробный урок
Примеры с использованием формулы частоты
Пример 1: Используя формулу частоты, найдите частоту волны, один цикл которой завершается за 0,5 с.
Решение:
, чтобы найти: частота
Дано:
Время = 0,5S
с использованием частоты формулы
F = 1 / T
F = 1 / 0,5
F = 2
Ответ: Ответ: Ответ: Ответ: Ответ: Ответ: Ответ: Частота 2Гц.
Пример 2: Найдите частоту световой волны, если длина волны света равна 600 нм.
Решение:
Найти: Частоту
Дано: Длина волны = 600 нм = 600 × 10 -9 м
= 6 × 10 -7 м
Мы знаем, что скорость света = 3 × 10 8 м/с
Используя формулу частоты
/ λ00f = F = 3 × 10 8 /6 × 10 -7
F = 5 × 10 14 СЕД -1
Ответ: Частота составляет 5 × 10 14 Гц.
Пример 3: Определите частоту маятника, совершающего один оборот за 4 секунды.
Решение:
, чтобы найти: частота
Дано:
Время = 4S
Использование частоты Формулы
F = 1 / T
F = 1/4
F = 0,25
Ответ: Частота. составляет 0,25 Гц.
Часто задаваемые вопросы о частоте
Что такое формула частоты?
Формула частоты определяется как формула для определения частоты волны. Формула частоты используется для определения частоты (f), периода времени (T), скорости волны (V) и длины волны (λ).
Каковы применения формулы частот?
Применение формулы частоты:
- Частота считается важным параметром в области науки и техники, как и формула частоты.
- Формула для частоты используется для определения скорости колебательных и вибрационных явлений, в основном механических колебаний, звуковых сигналов (звука), радиоволн и световых волн.
- Формула частоты используется для определения частоты (f), периода времени (T), скорости волны (V) и длины волны (λ), а также для получения других связанных формул.

Как формула частоты применяется для заданных значений?
Процентная формула представлена в следующем виде:
- Частотная формула в единицах времени представлена в виде: f = 1/T, где f — частота в герцах, а T — время, необходимое для завершения одного цикла в секундах
- Формула частоты с учетом длины волны и скорости волны задается следующим образом: f = 𝜈/λ, где 𝜈 – скорость волны, а λ – длина волны
- Формула частоты в терминах угловой частоты задается как f = ω/2π, где ω – угловая частота
Что такое «T» в частотной формуле?
В частотной формуле f = 1/T, T — период времени. T – время выполнения одного цикла (в секундах). Период времени обратно пропорционален частоте.
| ||||||||||||||
 На рис. 1 ниже угол
это Q, дуга, на которую он опирается
s, а радиус R. Q=
с/р. Обратите внимание, что единицей измерения s являются метры, а единицей
R — это метры, поэтому угол имеет
На рис. 1 ниже угол
это Q, дуга, на которую он опирается
s, а радиус R. Q=
с/р. Обратите внимание, что единицей измерения s являются метры, а единицей
R — это метры, поэтому угол имеет 
 ш = v/R. С
частота f = v/2pR
или v = 2pRf, w
= (2pRf)/R = 2pf=
2п/т.
ш = v/R. С
частота f = v/2pR
или v = 2pRf, w
= (2pRf)/R = 2pf=
2п/т. 
 Тогда K =
(1/2)Iw 2 .
Тогда K =
(1/2)Iw 2 . 

 За т = r x F , ткните пальцами
правой рукой в направлении r ладонью
рука готова к повороту в F . Поверните пальцы в Ф . Большой палец правой руки указывает на страницу.
Крутящий момент т составляет
вне страницы. (См. рис. 8b ниже)
За т = r x F , ткните пальцами
правой рукой в направлении r ладонью
рука готова к повороту в F . Поверните пальцы в Ф . Большой палец правой руки указывает на страницу.
Крутящий момент т составляет
вне страницы. (См. рис. 8b ниже) 9 ниже)
9 ниже) Когда на систему не действует внешний крутящий момент, угловой
импульс сохраняется.
Когда на систему не действует внешний крутящий момент, угловой
импульс сохраняется.  (рис. 10а
выше)
(рис. 10а
выше)
 аппарат изначально находится в состоянии покоя.
аппарат изначально находится в состоянии покоя.
 Final L = I w. Поскольку аппарат вращается против часовой стрелки, ш есть
вне страницы. После одного оборота
Final L = I w. Поскольку аппарат вращается против часовой стрелки, ш есть
вне страницы. После одного оборота 
 13а ниже):
13а ниже): Любая сила, проходящая через ось
не создает крутящего момента (r = 0).
Любая сила, проходящая через ось
не создает крутящего момента (r = 0). Т
= 313 Н
Т
= 313 Н Вопрос
= 71,1 0 R.
Вопрос
= 71,1 0 R. 
Leave A Comment